You might also like
- Laboratory 3 Digital Filter DesignDocument8 pagesLaboratory 3 Digital Filter DesignModitha LakshanNo ratings yet
- Certification Roadmap 11-30-16Document1 pageCertification Roadmap 11-30-16Cristian Gavilanes MontoyaNo ratings yet
- DP 900T00A ENU TrainerHandbookDocument288 pagesDP 900T00A ENU TrainerHandbookAndré baungatnerNo ratings yet
- Absolute Containers Brochure 2019 2 27 PDFDocument19 pagesAbsolute Containers Brochure 2019 2 27 PDFEduardo SolanoNo ratings yet
- Chapter 5 Assessment, Solution Manual, Electrons in Atoms, Glencoe, ChemistryDocument9 pagesChapter 5 Assessment, Solution Manual, Electrons in Atoms, Glencoe, Chemistrypumeananda100% (3)
- Pre Post and Infix NotationsDocument12 pagesPre Post and Infix NotationsGolla GirijaNo ratings yet
- Effect of Windowing Methods On Performance of FIR Filter DesignDocument4 pagesEffect of Windowing Methods On Performance of FIR Filter DesignijsretNo ratings yet
- Chapter 2 Discrete Data Control SystemsDocument78 pagesChapter 2 Discrete Data Control SystemsAmruth ThelkarNo ratings yet
- 69 PDFDocument38 pages69 PDFproteccionesNo ratings yet
- Student Exploration: Electron Configuration: 8-27-2005 Joshua Perez-LunaDocument14 pagesStudent Exploration: Electron Configuration: 8-27-2005 Joshua Perez-LunaJoshua Perez-Luna67% (3)
- HV Bushing Pno 300-765kv Manual Is2470gb-EDocument17 pagesHV Bushing Pno 300-765kv Manual Is2470gb-Eprotecciones100% (2)
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Digital Filter Design Using MatlabDocument41 pagesDigital Filter Design Using MatlabKirti Susan VargheseNo ratings yet
- Overview of Risk Based Audit ProcessDocument17 pagesOverview of Risk Based Audit ProcessAira Nhaira Mecate100% (1)
- Design of FIR Filter Using Verilog HDLDocument43 pagesDesign of FIR Filter Using Verilog HDLKarthik Kodali71% (24)
- Educational Useof EMTPMODELSforthe StudyDocument7 pagesEducational Useof EMTPMODELSforthe Studysathish2103No ratings yet
- University 2 Marks Ans DTSSPDocument5 pagesUniversity 2 Marks Ans DTSSPsanth_213No ratings yet
- Wavelet Transform Approach To Distance: Protection of Transmission LinesDocument6 pagesWavelet Transform Approach To Distance: Protection of Transmission LinesthavaselvanNo ratings yet
- 07a Fourier AnalysisDocument20 pages07a Fourier AnalysisPersonOverTwoNo ratings yet
- The Basic Principles of OFDMDocument30 pagesThe Basic Principles of OFDMsureshya22No ratings yet
- Fast Exact Adaptive Algorithms For Feedforward Active Noise ControlDocument25 pagesFast Exact Adaptive Algorithms For Feedforward Active Noise ControlAnuroop G RaoNo ratings yet
- HDL AdaptativeDocument4 pagesHDL AdaptativeabedoubariNo ratings yet
- Transmission Line FaultDocument6 pagesTransmission Line FaultAbhinav ShendageNo ratings yet
- Digital Control Systems: Lecture NotesDocument61 pagesDigital Control Systems: Lecture NotesHari Pavan0391No ratings yet
- Weekly PP PDFDocument11 pagesWeekly PP PDFDanielHaileNo ratings yet
- Automatic Condition Monitoring System For Crack Detection in Rotating MachineryDocument20 pagesAutomatic Condition Monitoring System For Crack Detection in Rotating Machinerypeter.phamNo ratings yet
- Jecet: Journal of Electronics and Communication Engineering & Technology (JECET)Document11 pagesJecet: Journal of Electronics and Communication Engineering & Technology (JECET)IAEME PublicationNo ratings yet
- An Efficient BER Analysis of OFDM Systems With ICI Conjugate Cancellation MethodDocument6 pagesAn Efficient BER Analysis of OFDM Systems With ICI Conjugate Cancellation Methodnayeem4444No ratings yet
- DSP and Power System ProtectionDocument11 pagesDSP and Power System ProtectionsegamegaNo ratings yet
- Ultrasonic Signal De-Noising Using Dual Filtering AlgorithmDocument8 pagesUltrasonic Signal De-Noising Using Dual Filtering Algorithmvhito619No ratings yet
- Average FilteringDocument22 pagesAverage Filtering7204263474No ratings yet
- Elec9123 DSP DesignDocument7 pagesElec9123 DSP DesignSydney FinestNo ratings yet
- Ccac 1Document6 pagesCcac 1Mauricio SanabriaNo ratings yet
- Spectral Correlation Based Signal Detection MethodDocument6 pagesSpectral Correlation Based Signal Detection Methodlogu_thalirNo ratings yet
- Implementation An Adaptive Data Window Technique in A Distance Relay M.S. Sachdev T.S. Sidhu D.S. Ghotra University of Saskatchewan, CanadaDocument4 pagesImplementation An Adaptive Data Window Technique in A Distance Relay M.S. Sachdev T.S. Sidhu D.S. Ghotra University of Saskatchewan, Canadasirisiri100No ratings yet
- Energies 14 07112Document20 pagesEnergies 14 07112huskeeNo ratings yet
- Analysis of Successive Interference Cancellation Scheme With M-Ary QAM in DS/CDMA SystemsDocument4 pagesAnalysis of Successive Interference Cancellation Scheme With M-Ary QAM in DS/CDMA Systemsalexandr745No ratings yet
- Dspa Word FileDocument82 pagesDspa Word FilenithinpogbaNo ratings yet
- Performance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersDocument5 pagesPerformance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersMasterArvinNo ratings yet
- Simplified Design Approach of Rectangular Spiral Antenna For UHF Rfid TagDocument9 pagesSimplified Design Approach of Rectangular Spiral Antenna For UHF Rfid TagNag ChallaNo ratings yet
- Matlab Project IdeaDocument8 pagesMatlab Project IdeaSrivatson SridarNo ratings yet
- TC-212 DSPDocument43 pagesTC-212 DSPbakNo ratings yet
- Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDocument9 pagesAcoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDawitNo ratings yet
- Design and Implementation of Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDocument9 pagesDesign and Implementation of Acoustic Echo Cancellation On Xilinx Zynq For FPGA Co-Simulation Using Adaptive FilterDawitNo ratings yet
- 10 1049@iet-Gtd 2011 0592Document12 pages10 1049@iet-Gtd 2011 0592Anonymous vLerKYANo ratings yet
- WindowDocument4 pagesWindowsirisiri100No ratings yet
- Itt - (J+L) TI.v (T-JT) J: (Half Short-Circuits) .) )Document8 pagesItt - (J+L) TI.v (T-JT) J: (Half Short-Circuits) .) )Luisa De CairesNo ratings yet
- Optimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingDocument21 pagesOptimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingMalu MohanNo ratings yet
- 39 PDFDocument12 pages39 PDFVignesh RamakrishnanNo ratings yet
- DSP 1Document4 pagesDSP 1Pavan KulkarniNo ratings yet
- Successive Interference Cancellation Schemes in Multi-Rate Ds/Cdma SystemsDocument15 pagesSuccessive Interference Cancellation Schemes in Multi-Rate Ds/Cdma SystemsHadi KasasbehNo ratings yet
- InTech-Fractional Delay Digital FiltersDocument27 pagesInTech-Fractional Delay Digital FiltersSidharth MahotraNo ratings yet
- Performance and Analysis of OFDM Signal Using Matlab SimulinkDocument7 pagesPerformance and Analysis of OFDM Signal Using Matlab SimulinkIJMERNo ratings yet
- A New Power System Digital Harmonic AnalyzerDocument9 pagesA New Power System Digital Harmonic AnalyzerFabien CallodNo ratings yet
- Power Spectrum Estimation-LabSheetDocument3 pagesPower Spectrum Estimation-LabSheetJai GaizinNo ratings yet
- Sampling and Sampled-Data SystemsDocument20 pagesSampling and Sampled-Data SystemsAmit KumarNo ratings yet
- Ijet13 05 03 DFFGGDFDDF321Document8 pagesIjet13 05 03 DFFGGDFDDF321Navathej BangariNo ratings yet
- Applications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezDocument19 pagesApplications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezguyoaserNo ratings yet
- Distance: Testing ADocument7 pagesDistance: Testing AthavaselvanNo ratings yet
- Carrier Frequency Offset Compensation With Successive Cancellation in Uplink OFDMA SystemsDocument5 pagesCarrier Frequency Offset Compensation With Successive Cancellation in Uplink OFDMA SystemsSuman BhardwajNo ratings yet
- TeedDocument7 pagesTeedRaguramanNo ratings yet
- Event-Triggered Communication in Wide-Area Damping Control: A Limited Output Feedback Based ApproachDocument8 pagesEvent-Triggered Communication in Wide-Area Damping Control: A Limited Output Feedback Based Approachpratap200697No ratings yet
- Adaptive MudDocument13 pagesAdaptive MudVinayagam MariappanNo ratings yet
- DSP 5Document32 pagesDSP 5Jayan GoelNo ratings yet
- Unit I DC Corrected Version-LibDocument32 pagesUnit I DC Corrected Version-LibpanthamangalamNo ratings yet
- DSP 394Document56 pagesDSP 394Muhammad Hashim raza100% (1)
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
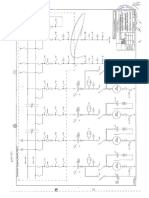
- Diagrama Unifilar GISDocument1 pageDiagrama Unifilar GISproteccionesNo ratings yet
- V Sie El001 Common 074 CDocument23 pagesV Sie El001 Common 074 CproteccionesNo ratings yet
- Standard Torque Values - Metric SystemDocument1 pageStandard Torque Values - Metric SystemproteccionesNo ratings yet
- V Sie El001 Common 074 DDocument23 pagesV Sie El001 Common 074 DproteccionesNo ratings yet
- RPLC Signal ListDocument12 pagesRPLC Signal ListproteccionesNo ratings yet
- V Sie El001 Common 074 eDocument23 pagesV Sie El001 Common 074 eproteccionesNo ratings yet
- Signal List: RPLC ProjectDocument21 pagesSignal List: RPLC ProjectproteccionesNo ratings yet
- United States Patent (10) Patent No.: US 8,649,142 B2Document20 pagesUnited States Patent (10) Patent No.: US 8,649,142 B2proteccionesNo ratings yet
- Signal List: Explanation of TermsDocument1 pageSignal List: Explanation of TermsproteccionesNo ratings yet
- Comment Control Sheet V SIE EL001 COMMON 047 - CDocument4 pagesComment Control Sheet V SIE EL001 COMMON 047 - CproteccionesNo ratings yet
- Comment Control Sheet V SIE EL001 COMMON 048 - DDocument2 pagesComment Control Sheet V SIE EL001 COMMON 048 - DproteccionesNo ratings yet
- Comment Control Sheet V SIE EL001 COMMON 074 - CDocument3 pagesComment Control Sheet V SIE EL001 COMMON 074 - CproteccionesNo ratings yet
- Calculos Alcances Caruachi Toff2Document6 pagesCalculos Alcances Caruachi Toff2proteccionesNo ratings yet
- Section 16126 - 201407071322102527Document6 pagesSection 16126 - 201407071322102527proteccionesNo ratings yet
- Maintain Power Delivery!: Power Plant Motor Bus Transfer CapabilitiesDocument3 pagesMaintain Power Delivery!: Power Plant Motor Bus Transfer CapabilitiesproteccionesNo ratings yet
- 782 eDocument12 pages782 eproteccionesNo ratings yet
- Harting 1Document9 pagesHarting 1proteccionesNo ratings yet
- Faculty of Civil Engineering and Planning Civil Engineering Department Petra Christian UniversityDocument59 pagesFaculty of Civil Engineering and Planning Civil Engineering Department Petra Christian Universitykenny lieNo ratings yet
- Teacher Empowerment As An Important Component of Job Satisfaction A Comparative Study of Teachers Perspectives in Al Farwaniya District KuwaitDocument24 pagesTeacher Empowerment As An Important Component of Job Satisfaction A Comparative Study of Teachers Perspectives in Al Farwaniya District KuwaitAtique RahmanNo ratings yet
- Q3 - Summative Test2 - Statprob 2022 2023Document2 pagesQ3 - Summative Test2 - Statprob 2022 2023Christian Lloyd ReandinoNo ratings yet
- Project TitleDocument2 pagesProject TitleVISHAL S. VNo ratings yet
- Heat ExchangerDocument5 pagesHeat Exchangersara smithNo ratings yet
- Restrictions AOP30 enDocument1 pageRestrictions AOP30 enRicardo RamirezNo ratings yet
- Cloudworx Pdms UsDocument2 pagesCloudworx Pdms Usguru4lifegmailcomNo ratings yet
- ExerciseDocument10 pagesExerciseNguyen Mai QuynhNo ratings yet
- Assignment ProblemsDocument22 pagesAssignment ProblemsPooja Yadav100% (1)
- Vernacular in Andhra PradeshDocument1 pageVernacular in Andhra PradeshNandyala Rajarajeswari DeviNo ratings yet
- s145 Series HMM 201902 PDFDocument73 pagess145 Series HMM 201902 PDFEuNo ratings yet
- Integrated Curriculum For Secondary Schools: Mathematics Form 2Document139 pagesIntegrated Curriculum For Secondary Schools: Mathematics Form 2Izawaty IsmailNo ratings yet
- Week 14 Report2Document27 pagesWeek 14 Report2Melaku DesalegneNo ratings yet
- Seventh Pay Commission ArrearsDocument11 pagesSeventh Pay Commission Arrearssantosh bharathyNo ratings yet
- Mechatronics Course PlanDocument3 pagesMechatronics Course PlanMohammad Faraz AkhterNo ratings yet
- C1 L2D Quadratic FormulaDocument3 pagesC1 L2D Quadratic FormulaJo-Amver Valera ManzanoNo ratings yet
- FINAL Shivani Confined Space PermitDocument1 pageFINAL Shivani Confined Space PermitVimal SinghNo ratings yet
- Amanuel MekonnenDocument125 pagesAmanuel Mekonnenabata yohannesNo ratings yet
- p-100 Vol2 1935 Part5Document132 pagesp-100 Vol2 1935 Part5Matias MancillaNo ratings yet
- CS221 - Artificial Intelligence - Search - 4 Dynamic ProgrammingDocument23 pagesCS221 - Artificial Intelligence - Search - 4 Dynamic ProgrammingArdiansyah Mochamad NugrahaNo ratings yet
- TrapsDocument11 pagesTrapsAmandeep AroraNo ratings yet
- Catalog ITEM - Pdf4a3667894b315Document552 pagesCatalog ITEM - Pdf4a3667894b315Domokos LeventeNo ratings yet
- (Checked) 12 Anh 1-8Document9 pages(Checked) 12 Anh 1-8Nguyễn Khánh LinhNo ratings yet