You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- College Level Math Practice TestDocument17 pagesCollege Level Math Practice TestHarsha Kasaragod100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Study Material For MathsDocument105 pagesStudy Material For MathsmicrodotcdmNo ratings yet
- The Fourier Transform and Its Applications Ronald N. Bracewell CONTENTSDocument8 pagesThe Fourier Transform and Its Applications Ronald N. Bracewell CONTENTSAnonymous eDmTnqqy8w0% (3)
- University of Engineering and Technology, Taxila: Lab Manual No 01 Introduction To MATLABDocument27 pagesUniversity of Engineering and Technology, Taxila: Lab Manual No 01 Introduction To MATLABWaqas Ahmed100% (1)
- Math and Music Lesson PlanDocument3 pagesMath and Music Lesson Planapi-258333563No ratings yet
- 69 PDFDocument38 pages69 PDFproteccionesNo ratings yet
- V E Smith The General Science of NatureDocument386 pagesV E Smith The General Science of Naturetinman2009No ratings yet
- HV Bushing Pno 300-765kv Manual Is2470gb-EDocument17 pagesHV Bushing Pno 300-765kv Manual Is2470gb-Eprotecciones100% (2)
- IB Maths:Truth TableDocument5 pagesIB Maths:Truth Tablesanand11No ratings yet
- 1st Year Notes 2nd Year Notes Bhattiacademy Com PDFDocument10 pages1st Year Notes 2nd Year Notes Bhattiacademy Com PDFAmama zaheerNo ratings yet
- The Lengths of Proofs: Kreisel's Conjecture and Godel's Speed-Up TheoremDocument33 pagesThe Lengths of Proofs: Kreisel's Conjecture and Godel's Speed-Up TheoremstefanodotNo ratings yet
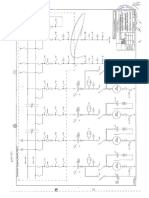
- Diagrama Unifilar GISDocument1 pageDiagrama Unifilar GISproteccionesNo ratings yet
- V Sie El001 Common 074 DDocument23 pagesV Sie El001 Common 074 DproteccionesNo ratings yet
- Standard Torque Values - Metric SystemDocument1 pageStandard Torque Values - Metric SystemproteccionesNo ratings yet
- RPLC Signal ListDocument12 pagesRPLC Signal ListproteccionesNo ratings yet
- V Sie El001 Common 074 CDocument23 pagesV Sie El001 Common 074 CproteccionesNo ratings yet
- Signal List: Explanation of TermsDocument1 pageSignal List: Explanation of TermsproteccionesNo ratings yet
- Signal List: RPLC ProjectDocument21 pagesSignal List: RPLC ProjectproteccionesNo ratings yet
- Comment Control Sheet V SIE EL001 COMMON 048 - DDocument2 pagesComment Control Sheet V SIE EL001 COMMON 048 - DproteccionesNo ratings yet
- Comment Control Sheet V SIE EL001 COMMON 047 - CDocument4 pagesComment Control Sheet V SIE EL001 COMMON 047 - CproteccionesNo ratings yet
- V Sie El001 Common 074 eDocument23 pagesV Sie El001 Common 074 eproteccionesNo ratings yet
- Calculos Alcances Caruachi Toff2Document6 pagesCalculos Alcances Caruachi Toff2proteccionesNo ratings yet
- Comment Control Sheet V SIE EL001 COMMON 074 - CDocument3 pagesComment Control Sheet V SIE EL001 COMMON 074 - CproteccionesNo ratings yet
- 782 eDocument12 pages782 eproteccionesNo ratings yet
- Section 16126 - 201407071322102527Document6 pagesSection 16126 - 201407071322102527proteccionesNo ratings yet
- United States Patent (10) Patent No.: US 8,649,142 B2Document20 pagesUnited States Patent (10) Patent No.: US 8,649,142 B2proteccionesNo ratings yet
- Maintain Power Delivery!: Power Plant Motor Bus Transfer CapabilitiesDocument3 pagesMaintain Power Delivery!: Power Plant Motor Bus Transfer CapabilitiesproteccionesNo ratings yet
- Harting 1Document9 pagesHarting 1proteccionesNo ratings yet
- Exercise 3 - Derivation of Single Phase Flow EquationsDocument4 pagesExercise 3 - Derivation of Single Phase Flow EquationsAlbertlb AB100% (2)
- Theorems On Tangent and SecantDocument37 pagesTheorems On Tangent and SecantxannieNo ratings yet
- Computer Analysis of Drill Point GeometryDocument14 pagesComputer Analysis of Drill Point GeometryLuis FelipeNo ratings yet
- Perimeter and Area 4-1Document10 pagesPerimeter and Area 4-1Ethan-Dale BrownNo ratings yet
- Sri Ramachandra School, Jangareddigudem Formative Assessment-I MathematicsDocument3 pagesSri Ramachandra School, Jangareddigudem Formative Assessment-I MathematicsRamesh Babu KommuNo ratings yet
- Set Cse Ca 1Document13 pagesSet Cse Ca 1Bhumika BiyaniNo ratings yet
- Pre Mid Exam Practice of SAW and TOPSIS MethodsDocument7 pagesPre Mid Exam Practice of SAW and TOPSIS Methodsmk1853828No ratings yet
- Discrete Mathematics - Propositional LogicDocument8 pagesDiscrete Mathematics - Propositional LogicAldrich PanioNo ratings yet
- Engineering Structures: Behzad Zakeri, Farzin ZareianDocument10 pagesEngineering Structures: Behzad Zakeri, Farzin ZareianAnderson UrreaNo ratings yet
- ConvolvedLFSR 2000Document6 pagesConvolvedLFSR 2000GhostNo ratings yet
- Discrete Structures, Logic, and Computability: Student Study GuideDocument161 pagesDiscrete Structures, Logic, and Computability: Student Study GuideluminenttNo ratings yet
- Assignment 1 - 21mab101tDocument2 pagesAssignment 1 - 21mab101tabishekmuthumurugan2019No ratings yet
- Midterm Examination: Fundamentals of MathematicsDocument6 pagesMidterm Examination: Fundamentals of MathematicsRemalyn Quinay CasemNo ratings yet
- Exponential Generating Function PDFDocument2 pagesExponential Generating Function PDFKristinNo ratings yet
- Mental Mathematics Marathon Semi-Final 2012 PowerpointDocument42 pagesMental Mathematics Marathon Semi-Final 2012 Powerpointrishie1No ratings yet
- H2-Optimal Control - Lec8Document83 pagesH2-Optimal Control - Lec8stara123warNo ratings yet
- Math Paper1FDocument20 pagesMath Paper1FVarun PanickerNo ratings yet
- Technical Mathematics GR 10 Paper 2Document8 pagesTechnical Mathematics GR 10 Paper 2refiloemndaweni93No ratings yet
- Summer Homework 3rd GradeDocument4 pagesSummer Homework 3rd Gradeafmoczaee100% (1)
- Math 55 3rd Exam Exercises PDFDocument3 pagesMath 55 3rd Exam Exercises PDFMark ReyesNo ratings yet
- A Dynamical Systems Perspective On InteractionDocument43 pagesA Dynamical Systems Perspective On InteractionAnonymous CjcDVK54No ratings yet