You might also like
- The Grid 2: Blueprint for a New Computing InfrastructureFrom EverandThe Grid 2: Blueprint for a New Computing InfrastructureNo ratings yet
- Unmanned Aircraft SystemsFrom EverandUnmanned Aircraft SystemsElla AtkinsNo ratings yet
- Vacuum BoxDocument2 pagesVacuum BoxSyed Mahmud Habibur RahmanNo ratings yet
- E 1254 - 03 Rteyntq - PDFDocument3 pagesE 1254 - 03 Rteyntq - PDFMarceloNo ratings yet
- Evaluating Response Robot Capabilities: Standard Terminology ForDocument3 pagesEvaluating Response Robot Capabilities: Standard Terminology ForAlevj DbNo ratings yet
- Materials and Processes For NDT TechnologyDocument2 pagesMaterials and Processes For NDT TechnologyPrashant PuriNo ratings yet
- Preface DdpmasDocument2 pagesPreface DdpmasGD(Systems)No ratings yet
- ILAC - G8 - 03 - 2009 Guidelines On The Reporting of Compliance With Specification PDFDocument8 pagesILAC - G8 - 03 - 2009 Guidelines On The Reporting of Compliance With Specification PDFByron MiñoNo ratings yet
- Icao Safety RpasDocument15 pagesIcao Safety RpasJuan C. MoñinoNo ratings yet
- Courses of Study For PG Programmes - 2019-21 PDFDocument484 pagesCourses of Study For PG Programmes - 2019-21 PDFBaka NuduNo ratings yet
- Application Notes: Nondestructive Bond Testing For Aircraft CompositesDocument5 pagesApplication Notes: Nondestructive Bond Testing For Aircraft CompositesPDDELUCANo ratings yet
- Mil HDBK 728 - 6 PDFDocument90 pagesMil HDBK 728 - 6 PDFretrospect100050% (2)
- CAST HandbookDocument148 pagesCAST HandbookVijay BantuNo ratings yet
- Rief On Testing and Certification Procedures in Military Aviation SectorDocument1 pageRief On Testing and Certification Procedures in Military Aviation SectorkadiravannnNo ratings yet
- C1 For UTDocument23 pagesC1 For UTMung Duong XuanNo ratings yet
- Cad 6011 Ii Agr 1Document130 pagesCad 6011 Ii Agr 1mellon3duwenNo ratings yet
- As NZS 62115-2008 Electric Toys - SafetyDocument9 pagesAs NZS 62115-2008 Electric Toys - SafetySAI Global - APACNo ratings yet
- Specification Picture Standard Configuration:: Quotation Sheet To Drone JT20L-606Document6 pagesSpecification Picture Standard Configuration:: Quotation Sheet To Drone JT20L-606Wan Buanan Wan HussainNo ratings yet
- Astm E498-00 PDFDocument4 pagesAstm E498-00 PDFJORGE ARTURO TORIBIO HUERTA100% (1)
- 23-CANARD DRONES Presentacion SECPhO Cluster-AeroespacialDocument26 pages23-CANARD DRONES Presentacion SECPhO Cluster-AeroespacialAmine TalebNo ratings yet
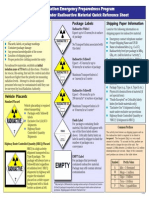
- Emergency Responder Fact Sheet - TransportationDocument2 pagesEmergency Responder Fact Sheet - TransportationS Pushya Mitra100% (1)
- BS en 71-2-2011+a1-2014Document26 pagesBS en 71-2-2011+a1-2014Aloka KarunarathneNo ratings yet
- 755Document2 pages755Alagu MurugesanNo ratings yet
- Mil STD 704Document25 pagesMil STD 704josebrigas4530No ratings yet
- 607303-664792677redacted T.O. 33B-1-2 (PT Only) PDFDocument52 pages607303-664792677redacted T.O. 33B-1-2 (PT Only) PDFZaid RabaaNo ratings yet
- Operation Manual Erle Copter UbuntuDocument24 pagesOperation Manual Erle Copter UbuntumihociuliNo ratings yet
- W1720EP Phased Array Beamforming KitDocument6 pagesW1720EP Phased Array Beamforming KitTeddy112No ratings yet
- AC7122.4 Rev ADocument20 pagesAC7122.4 Rev ANamelezz ShadowwNo ratings yet
- Iso 8456-1985Document6 pagesIso 8456-1985Cuong Nguyen ManhNo ratings yet
- Composite Tester BondMaster 1000Document4 pagesComposite Tester BondMaster 1000vrapciudorianNo ratings yet
- TenKeyAreas CSAStandard Z614 14Document5 pagesTenKeyAreas CSAStandard Z614 14Amelia HapsariNo ratings yet
- ASTM F846-WITHDRAWN Standard Guide For Testing Performance of Amusement Rides and DevicesDocument3 pagesASTM F846-WITHDRAWN Standard Guide For Testing Performance of Amusement Rides and DevicesConhydra AcoaguaNo ratings yet
- RCMP Drone Privacy Impact AssessmentDocument33 pagesRCMP Drone Privacy Impact AssessmentNational Security Oversight Institute of CanadaNo ratings yet
- Cswip Plant Inspector Competence/Experience Log: Level 2 PrequalificationDocument20 pagesCswip Plant Inspector Competence/Experience Log: Level 2 PrequalificationV_Santhanakrishnan100% (1)
- Evaluation of The Performance of Computed Radiography Systems With Different Sources and Different ConfigurationsDocument12 pagesEvaluation of The Performance of Computed Radiography Systems With Different Sources and Different ConfigurationsdantegimenezNo ratings yet
- En 6072 - Constant Amplitude Fatigue TestingDocument38 pagesEn 6072 - Constant Amplitude Fatigue TestingIbere SantosNo ratings yet
- AC25 562 1B - Dynamic Evaluation of Seat Restraint System PDFDocument104 pagesAC25 562 1B - Dynamic Evaluation of Seat Restraint System PDFffontanaNo ratings yet
- A I D E I: Viation Nformation ATA Xchange NterfaceDocument20 pagesA I D E I: Viation Nformation ATA Xchange Nterfacechakri.unguturu2543No ratings yet
- CACRC Comittee InformationDocument23 pagesCACRC Comittee InformationBebi VatanenNo ratings yet
- Nondestructive Bond Testing For Aircraft Composites-OlympusDocument6 pagesNondestructive Bond Testing For Aircraft Composites-OlympusAhmad DanielNo ratings yet
- Pre-Technical Inspection ChecklistDocument2 pagesPre-Technical Inspection ChecklistnithinNo ratings yet
- Ebee X ENDocument8 pagesEbee X ENomarNo ratings yet
- Astm E1742 - E1742m-12 PDFDocument17 pagesAstm E1742 - E1742m-12 PDFNoelia ChNo ratings yet
- Measurement of Fuel System Icing Inhibitors (Ether Type) in Aviation FuelsDocument5 pagesMeasurement of Fuel System Icing Inhibitors (Ether Type) in Aviation FuelsMuhammad KhairuddinNo ratings yet
- D 1218 Â " 02 - RDEYMTGDocument7 pagesD 1218 Â " 02 - RDEYMTGElena BarónNo ratings yet
- ISO 148 For Pendulum Type Impact TestDocument1 pageISO 148 For Pendulum Type Impact TestPrashant PuriNo ratings yet
- Certification To Standards Relating To Equipment For Use inDocument6 pagesCertification To Standards Relating To Equipment For Use ingopinadh57No ratings yet
- Vancouver AAM White Paper Fall 2020Document60 pagesVancouver AAM White Paper Fall 2020Juan David100% (1)
- Fabrication and Control of Flat Bottomed Hole Ultrasonic Standard Reference BlocksDocument16 pagesFabrication and Control of Flat Bottomed Hole Ultrasonic Standard Reference BlocksharryNo ratings yet
- ANDTBF - 06 NDT Training SyllabusDocument34 pagesANDTBF - 06 NDT Training SyllabusHeidi CoxNo ratings yet
- Cohen'S KappaDocument10 pagesCohen'S KappaaspiNo ratings yet
- MSC/Flight Loads and DynamicsDocument10 pagesMSC/Flight Loads and DynamicsdulaijanNo ratings yet
- IsoDocument2 pagesIsoLeonardo GuzNo ratings yet
- PPE Testing and Certifications V 1.2Document50 pagesPPE Testing and Certifications V 1.2Karthi ThiyagarajanNo ratings yet
- Technical: Iso/Tr 5659-3Document22 pagesTechnical: Iso/Tr 5659-3Willem PentzNo ratings yet
- Eurocae Ed 12b PDFDocument2 pagesEurocae Ed 12b PDFKathy0% (2)
- To 33B-1-1 01jan2013Document856 pagesTo 33B-1-1 01jan2013izmitlimonNo ratings yet
- 1 ScopeDocument11 pages1 ScopeMichael SkrableNo ratings yet
- Astm G7 - G7M - 13Document7 pagesAstm G7 - G7M - 13Sofia YuliNo ratings yet
- Astm E2592-07Document4 pagesAstm E2592-07Partth VachhaniNo ratings yet
- Case 2864 9Cr - 1Mo-V Material Section I: Table 1 Table 2Document1 pageCase 2864 9Cr - 1Mo-V Material Section I: Table 1 Table 2Alevj Db100% (1)
- Comparison of Bond Strength or Ply Adhesion of Similar Laminates Made From Flexible MaterialsDocument3 pagesComparison of Bond Strength or Ply Adhesion of Similar Laminates Made From Flexible MaterialsAlevj Db100% (2)
- Determination of Residual Acetaldehyde in Polyethylene Terephthalate Bottle Polymer Using An Automated Static Head-Space Sampling Device and A Capillary GC With A Flame Ionization DetectorDocument10 pagesDetermination of Residual Acetaldehyde in Polyethylene Terephthalate Bottle Polymer Using An Automated Static Head-Space Sampling Device and A Capillary GC With A Flame Ionization DetectorAlevj Db75% (4)
- Microbial Ranking of Porous Packaging Materials (Exposure Chamber Method)Document9 pagesMicrobial Ranking of Porous Packaging Materials (Exposure Chamber Method)Alevj DbNo ratings yet
- Measuring Package and Seal Integrity Using Helium As The Tracer GasDocument7 pagesMeasuring Package and Seal Integrity Using Helium As The Tracer GasAlevj DbNo ratings yet
- Slow Rate Penetration Resistance of Flexible Barrier Films and LaminatesDocument5 pagesSlow Rate Penetration Resistance of Flexible Barrier Films and LaminatesAlevj Db100% (4)
- Performance Testing of Packages For Single Parcel Delivery SystemsDocument10 pagesPerformance Testing of Packages For Single Parcel Delivery SystemsAlevj Db100% (1)
- Design and Evaluation of Primary Flexible Packaging For Medical ProductsDocument18 pagesDesign and Evaluation of Primary Flexible Packaging For Medical ProductsAlevj DbNo ratings yet
- Mechanical-Shock Fragility of Products, Using Shock MachinesDocument8 pagesMechanical-Shock Fragility of Products, Using Shock MachinesAlevj Db0% (1)
- Treatment And/or Marking of Wood Packaging Materials: Standard Practice ForDocument6 pagesTreatment And/or Marking of Wood Packaging Materials: Standard Practice ForAlevj DbNo ratings yet
- Bridge Impact Testing: Standard Test Method ForDocument5 pagesBridge Impact Testing: Standard Test Method ForAlevj DbNo ratings yet
- D4169 16Document17 pagesD4169 16Alevj Db88% (17)
- Commercial Packaging: Standard Practice ForDocument5 pagesCommercial Packaging: Standard Practice ForAlevj DbNo ratings yet
- Environmental Stress Crack Resistance (ESCR) of Plastic Tighthead Drums Not Exceeding 60 Gal (227 L) in Rated CapacityDocument4 pagesEnvironmental Stress Crack Resistance (ESCR) of Plastic Tighthead Drums Not Exceeding 60 Gal (227 L) in Rated CapacityAlevj DbNo ratings yet
- Body Armor Wearer Measurement and Fitting of Armor: Standard Practice ForDocument21 pagesBody Armor Wearer Measurement and Fitting of Armor: Standard Practice ForAlevj DbNo ratings yet
- Anchor Systems Used For Detention Hollow Metal Systems: Standard Test Methods ForDocument16 pagesAnchor Systems Used For Detention Hollow Metal Systems: Standard Test Methods ForAlevj DbNo ratings yet
- Water-Or Solvent-Soluble Liquid Adhesives For Automatic Machine Sealing of Top Flaps of Fiberboard Shipping CasesDocument2 pagesWater-Or Solvent-Soluble Liquid Adhesives For Automatic Machine Sealing of Top Flaps of Fiberboard Shipping CasesAlevj DbNo ratings yet
- Strapping, Nonmetallic (And Joining Methods) : Standard Specification ForDocument9 pagesStrapping, Nonmetallic (And Joining Methods) : Standard Specification ForAlevj DbNo ratings yet
- Environmental Stress Crack Resistance of Plastic Injection Molded Open Head PailsDocument4 pagesEnvironmental Stress Crack Resistance of Plastic Injection Molded Open Head PailsAlevj DbNo ratings yet
- Child-Resistant Packages: Standard Classification ofDocument5 pagesChild-Resistant Packages: Standard Classification ofAlevj Db100% (1)
- Selection of Fire Test Methods For The Assessment of Upholstered Furnishings in Detention and Correctional FacilitiesDocument13 pagesSelection of Fire Test Methods For The Assessment of Upholstered Furnishings in Detention and Correctional FacilitiesAlevj DbNo ratings yet
- Evaluating Carpet Embedded Dirt Removal Effectiveness of Residential Central Vacuum Cleaning SystemsDocument16 pagesEvaluating Carpet Embedded Dirt Removal Effectiveness of Residential Central Vacuum Cleaning SystemsAlevj Db100% (1)
- Hand-Worn Metal Detectors Used in Safety and Security: Performance Standard ForDocument13 pagesHand-Worn Metal Detectors Used in Safety and Security: Performance Standard ForAlevj DbNo ratings yet
- Measuring Maximum Functional Wet Volume of Utility Vacuum CleanersDocument5 pagesMeasuring Maximum Functional Wet Volume of Utility Vacuum CleanersAlevj DbNo ratings yet
- Determining Changes in Fire-Test-Response Characteristics of Cushioning Materials After Water LeachingDocument4 pagesDetermining Changes in Fire-Test-Response Characteristics of Cushioning Materials After Water LeachingAlevj DbNo ratings yet
- Electromagnetic Shielding Effectiveness of Glazings: Standard Test Method ForDocument8 pagesElectromagnetic Shielding Effectiveness of Glazings: Standard Test Method ForAlevj DbNo ratings yet
- Passive Fiber Optic Seals: Standard Classification ForDocument2 pagesPassive Fiber Optic Seals: Standard Classification ForAlevj DbNo ratings yet
- Standard Test Method For: Designation: F1550 16Document12 pagesStandard Test Method For: Designation: F1550 16Alevj DbNo ratings yet
- Measuring Maximum Dry Volume of Utility Vacuum Cleaners: Standard Test Method ForDocument5 pagesMeasuring Maximum Dry Volume of Utility Vacuum Cleaners: Standard Test Method ForAlevj DbNo ratings yet
- Security Seals: Standard Classification ForDocument2 pagesSecurity Seals: Standard Classification ForAlevj DbNo ratings yet
- Kpolovie and Obilor PDFDocument26 pagesKpolovie and Obilor PDFMandalikaNo ratings yet
- Fabric DefectsDocument30 pagesFabric Defectsaparna_ftNo ratings yet
- Unit 6B - PassiveDocument18 pagesUnit 6B - PassiveDavid EstrellaNo ratings yet
- SSC 211 ED Activity 4.1Document4 pagesSSC 211 ED Activity 4.1bernard bulloNo ratings yet
- Quadratic SDocument20 pagesQuadratic SAnubastNo ratings yet
- 42ld340h Commercial Mode Setup Guide PDFDocument59 pages42ld340h Commercial Mode Setup Guide PDFGanesh BabuNo ratings yet
- Dr. Babasaheb Ambedkar Technological UniversityDocument3 pagesDr. Babasaheb Ambedkar Technological UniversityalfajNo ratings yet
- AnkitKumar InternshalaResume PDFDocument2 pagesAnkitKumar InternshalaResume PDFkusha010No ratings yet
- A Wicked Game by Kate BatemanDocument239 pagesA Wicked Game by Kate BatemanNevena Nikolic100% (1)
- Quality Assurance Plan-75FDocument3 pagesQuality Assurance Plan-75Fmohamad chaudhariNo ratings yet
- Growth Kinetic Models For Microalgae Cultivation A ReviewDocument16 pagesGrowth Kinetic Models For Microalgae Cultivation A ReviewJesús Eduardo De la CruzNo ratings yet
- Mystakidis2022 MetaverseDocument13 pagesMystakidis2022 MetaverseVennela NandikondaNo ratings yet
- Technical Data - Tad1342veDocument9 pagesTechnical Data - Tad1342veRachid SmailiNo ratings yet
- "Prayagraj ": Destination Visit ReportDocument5 pages"Prayagraj ": Destination Visit ReportswetaNo ratings yet
- Turbine Flowmeters-Commonly Asked Questions and Answers: For Chemical Composition Information.)Document8 pagesTurbine Flowmeters-Commonly Asked Questions and Answers: For Chemical Composition Information.)Alexander KlmNo ratings yet
- Video ObservationDocument8 pagesVideo Observationapi-532202065No ratings yet
- Deep Sea 500 Ats ManDocument18 pagesDeep Sea 500 Ats ManLeo Burns50% (2)
- Suggestions On How To Prepare The PortfolioDocument2 pagesSuggestions On How To Prepare The PortfolioPeter Pitas DalocdocNo ratings yet
- IRJ November 2021Document44 pagesIRJ November 2021sigma gaya100% (1)
- Manual de Utilizare HUMAX DIGI TV RDSDocument116 pagesManual de Utilizare HUMAX DIGI TV RDSenamicul50No ratings yet
- Dreizler EDocument265 pagesDreizler ERobis OliveiraNo ratings yet
- The Innovator - S SolutionDocument21 pagesThe Innovator - S SolutionKeijjo Matti100% (1)
- Paper:Introduction To Economics and Finance: Functions of Economic SystemDocument10 pagesPaper:Introduction To Economics and Finance: Functions of Economic SystemQadirNo ratings yet
- Enzymatic Hydrolysis, Analysis of Mucic Acid Crystals and Osazones, and Thin - Layer Chromatography of Carbohydrates From CassavaDocument8 pagesEnzymatic Hydrolysis, Analysis of Mucic Acid Crystals and Osazones, and Thin - Layer Chromatography of Carbohydrates From CassavaKimberly Mae MesinaNo ratings yet
- Study of Employees Performance Appraisal System in Hindustan Unilever LimitedDocument9 pagesStudy of Employees Performance Appraisal System in Hindustan Unilever LimitedSimranjitNo ratings yet
- 0n9) O6..,w48j-GDocument14 pages0n9) O6..,w48j-GMocha FurrerNo ratings yet
- Data Mining For Business Analyst AssignmentDocument9 pagesData Mining For Business Analyst AssignmentNageshwar SinghNo ratings yet
- Reviewer CSCDocument22 pagesReviewer CSCChristopher CocalNo ratings yet
- MHR Common SFX and LimitsDocument2 pagesMHR Common SFX and LimitsJeferson MoreiraNo ratings yet
- PUBLIC - Axie Origins Changelogs - Season 4Document2 pagesPUBLIC - Axie Origins Changelogs - Season 4Alef CarlosNo ratings yet