You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- TSR 9440 - Ruined KingdomsDocument128 pagesTSR 9440 - Ruined KingdomsJulien Noblet100% (15)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
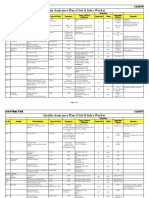
- Quality Assurance Plan - CivilDocument11 pagesQuality Assurance Plan - CivilDeviPrasadNathNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- General KnowlwdgeDocument115 pagesGeneral KnowlwdgeMUDASSAR IDRIS98% (44)
- PTE Writing FormatDocument8 pagesPTE Writing FormatpelizNo ratings yet
- Ryff's Six-Factor Model of Psychological Well-BeingDocument7 pagesRyff's Six-Factor Model of Psychological Well-BeingYogi Sastrawan100% (1)
- Top Survival Tips - Kevin Reeve - OnPoint Tactical PDFDocument8 pagesTop Survival Tips - Kevin Reeve - OnPoint Tactical PDFBillLudley5100% (1)
- Introduction To QFDDocument37 pagesIntroduction To QFDkrunal07786No ratings yet
- Fractional Differential Equations: Bangti JinDocument377 pagesFractional Differential Equations: Bangti JinOmar GuzmanNo ratings yet
- KPJ Healthcare Berhad (NUS ANalyst)Document11 pagesKPJ Healthcare Berhad (NUS ANalyst)noniemoklasNo ratings yet
- Nayab Mamlatdar D.y.S.O.prelim Exam Study Material-5Document9 pagesNayab Mamlatdar D.y.S.O.prelim Exam Study Material-5krunal07786100% (2)
- IRJ November 2021Document44 pagesIRJ November 2021sigma gaya100% (1)
- Value Standard PDFDocument33 pagesValue Standard PDFkrunal07786100% (1)
- RTO Question Bank EnglishDocument107 pagesRTO Question Bank EnglishRavi KumarNo ratings yet
- Fitter Syllabus Sem 1Document18 pagesFitter Syllabus Sem 1krunal07786No ratings yet
- Padma Awards 2016 PDFDocument5 pagesPadma Awards 2016 PDFkrunal07786No ratings yet
- Rivers of Gujarat March 2012Document55 pagesRivers of Gujarat March 2012Gayathri MuthuramakrishnanNo ratings yet
- Maru Gujarat Current Affairs March 2015Document23 pagesMaru Gujarat Current Affairs March 2015krunal07786No ratings yet
- Text-Books Evaluation by QFDDocument8 pagesText-Books Evaluation by QFDkrunal07786No ratings yet
- Vesely 1Document32 pagesVesely 1Vinay RajputNo ratings yet
- Sandesh Action Replay Science and TechnologyDocument7 pagesSandesh Action Replay Science and Technologykrunal07786No ratings yet
- Sandesh Action Replay SportsDocument7 pagesSandesh Action Replay Sportskrunal07786No ratings yet
- Vol78 2012 3 Art04 277 293Document17 pagesVol78 2012 3 Art04 277 293krunal07786No ratings yet
- Sandesh Action Replay 2015 GujaratDocument7 pagesSandesh Action Replay 2015 Gujaratkrunal07786No ratings yet
- Trafic Inspector GSRTCDocument3 pagesTrafic Inspector GSRTCkrunal07786No ratings yet
- Press Information Bureau Government of India Ministry of Home AffairsDocument5 pagesPress Information Bureau Government of India Ministry of Home Affairskrunal07786No ratings yet
- Intro 07Document24 pagesIntro 07netgalaxy2010No ratings yet
- Theta 30: R RH J T SDocument1 pageTheta 30: R RH J T Skrunal07786No ratings yet
- Rawlings QuinnDocument13 pagesRawlings QuinnLolo Eisa0% (2)
- Flexible Manufacturing SystemsDocument18 pagesFlexible Manufacturing SystemsVijay Kumar100% (1)
- CS 785, Fall 2001: Learning Agents Laboratory Department of Computer Science George Mason UniversityDocument82 pagesCS 785, Fall 2001: Learning Agents Laboratory Department of Computer Science George Mason Universitykrunal07786No ratings yet
- Product Design and Value EngineeringDocument2 pagesProduct Design and Value EngineeringBhavesh Pipaliya50% (2)
- Understanding Customer Requirements: Principles of DesignDocument30 pagesUnderstanding Customer Requirements: Principles of DesignPranav GhoshNo ratings yet
- Fault Tree AnalysisDocument8 pagesFault Tree Analysiskrunal07786No ratings yet
- FmeaDocument9 pagesFmeaBalu PakhareNo ratings yet
- Fms 1Document49 pagesFms 1Md EliasNo ratings yet
- Vesely 1Document32 pagesVesely 1Vinay RajputNo ratings yet
- CS62S: Expert Systems: Based OnDocument20 pagesCS62S: Expert Systems: Based Onkrunal07786No ratings yet
- Flexible Manufacturing Systems (FMS)Document28 pagesFlexible Manufacturing Systems (FMS)Anand Kumar100% (1)
- James KlotzDocument2 pagesJames KlotzMargaret ElwellNo ratings yet
- 3-CHAPTER-1 - Edited v1Document32 pages3-CHAPTER-1 - Edited v1Michael Jaye RiblezaNo ratings yet
- Evaluating Websites A Checklist - JOHN CARLO G. GAERLANDocument3 pagesEvaluating Websites A Checklist - JOHN CARLO G. GAERLANMarvin CincoNo ratings yet
- SST Vs BBTDocument7 pagesSST Vs BBTFlaxkikare100% (1)
- Rules of Bursa Malaysia Securities Clearing 2019Document11 pagesRules of Bursa Malaysia Securities Clearing 2019Evelyn SeethaNo ratings yet
- Cultural AnthropologyDocument12 pagesCultural AnthropologyTRISH BOCANo ratings yet
- Ingres in ReproductionDocument20 pagesIngres in ReproductionKarlNo ratings yet
- Term Paper A and CDocument9 pagesTerm Paper A and CKishaloy NathNo ratings yet
- 2015 Grade 4 English HL Test MemoDocument5 pages2015 Grade 4 English HL Test MemorosinaNo ratings yet
- Deictics and Stylistic Function in J.P. Clark-Bekederemo's PoetryDocument11 pagesDeictics and Stylistic Function in J.P. Clark-Bekederemo's Poetryym_hNo ratings yet
- Flange CheckDocument6 pagesFlange CheckMohd. Fadhil JamirinNo ratings yet
- Mastering American EnglishDocument120 pagesMastering American Englishmarharnwe80% (10)
- HSG 2023 KeyDocument36 pagesHSG 2023 Keyle827010No ratings yet
- PUBLIC - Axie Origins Changelogs - Season 4Document2 pagesPUBLIC - Axie Origins Changelogs - Season 4Alef CarlosNo ratings yet
- 1.12 Properties of The Ism - FlexibilityDocument4 pages1.12 Properties of The Ism - FlexibilityyomnahelmyNo ratings yet
- Determination of Hydroxymethylfurfural (HMF) in Honey Using The LAMBDA SpectrophotometerDocument3 pagesDetermination of Hydroxymethylfurfural (HMF) in Honey Using The LAMBDA SpectrophotometerVeronica DrgNo ratings yet
- Policy Implementation NotesDocument17 pagesPolicy Implementation NoteswubeNo ratings yet
- Brianna Pratt - l3stl1 - Dsu Lesson Plan TemplateDocument5 pagesBrianna Pratt - l3stl1 - Dsu Lesson Plan Templateapi-593886164No ratings yet
- -4618918اسئلة مدني فحص التخطيط مع الأجوبة من د. طارق الشامي & م. أحمد هنداويDocument35 pages-4618918اسئلة مدني فحص التخطيط مع الأجوبة من د. طارق الشامي & م. أحمد هنداويAboalmaail Alamin100% (1)
- Chapter 3-CP For Armed Conflict SituationDocument23 pagesChapter 3-CP For Armed Conflict Situationisidro.ganadenNo ratings yet
- Solitax SCDocument8 pagesSolitax SCprannoyNo ratings yet