You might also like
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Global Analysis of A Flexible RiserDocument7 pagesGlobal Analysis of A Flexible RiserfdoppelNo ratings yet
- Leaflet SPM and SOPDocument4 pagesLeaflet SPM and SOPAbdullah Al-ZahraniNo ratings yet
- Mooring & AnchoringDocument27 pagesMooring & AnchoringMontu PatelNo ratings yet
- Contemporary Megaprojects: Organization, Vision, and Resistance in the 21st CenturyFrom EverandContemporary Megaprojects: Organization, Vision, and Resistance in the 21st CenturySeth SchindlerNo ratings yet
- Waves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971From EverandWaves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971R. E. MeyerNo ratings yet
- HSE and SOP ON EMBARKATIONDocument5 pagesHSE and SOP ON EMBARKATIONNajmirzan IsraNo ratings yet
- FPSO Cuulong MV9 Project SummaryDocument2 pagesFPSO Cuulong MV9 Project SummaryKim OanhNo ratings yet
- Condition Assessment Programme (CAP) Guidance NoteDocument24 pagesCondition Assessment Programme (CAP) Guidance NoteFarhanNo ratings yet
- STA Article 30jan2013 PDFDocument11 pagesSTA Article 30jan2013 PDFpriyoNo ratings yet
- Mooring Integrity Management: Guidance Notes OnDocument26 pagesMooring Integrity Management: Guidance Notes OnArdy MansNo ratings yet
- An Overview of The Prediction Methods For Roll Damping of ShipsDocument22 pagesAn Overview of The Prediction Methods For Roll Damping of ShipsВасил ЙордановNo ratings yet
- Dynamic Analysis of Multiple Body Floating Platforms Coupled With Mooring Lines and ReisersDocument223 pagesDynamic Analysis of Multiple Body Floating Platforms Coupled With Mooring Lines and ReisersYoungtae KimNo ratings yet
- Coastal Ocean Observing SystemsFrom EverandCoastal Ocean Observing SystemsYonggang LiuNo ratings yet
- Analyzing Static and Dynamic Lifting Process of Topside PlatformDocument63 pagesAnalyzing Static and Dynamic Lifting Process of Topside Platformpriyanka pertiwiNo ratings yet
- 02pa GT 4 6 PDFDocument25 pages02pa GT 4 6 PDFMarcelo Varejão CasarinNo ratings yet
- Elevate Your Boat with a Compact BoatliftDocument9 pagesElevate Your Boat with a Compact BoatliftKanenasNo ratings yet
- Germany Research VesselsDocument83 pagesGermany Research VesselsChakma NhikiNo ratings yet
- 2 Seismic Analysis of Single Degree of Freedom SystemsDocument13 pages2 Seismic Analysis of Single Degree of Freedom SystemsLargu George DanielNo ratings yet
- Optimoor: Mooring Analysis So Ware For Ships & BargesDocument2 pagesOptimoor: Mooring Analysis So Ware For Ships & BargesTam Jun HuiNo ratings yet
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityFrom EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNo ratings yet
- Orca Flex BrochureDocument2 pagesOrca Flex BrochurejesusgameboyNo ratings yet
- White Paper: Computer Simulation of Buoy Mooring SystemsDocument12 pagesWhite Paper: Computer Simulation of Buoy Mooring Systemssmithwork100% (1)
- Erasmus - PL - Costs & Revenues From Running A ShipDocument43 pagesErasmus - PL - Costs & Revenues From Running A ShipKaptan LeventcumNo ratings yet
- Sustainable Marine Structures - Volume 05 - Issue 01 - March 2023Document52 pagesSustainable Marine Structures - Volume 05 - Issue 01 - March 2023Bilingual PublishingNo ratings yet
- Jack Up DesignDocument29 pagesJack Up DesignKirti BairathiNo ratings yet
- DSME VLCC CrosstielessDocument1 pageDSME VLCC Crosstielesssilidiri100% (1)
- Tanker SampleDocument14 pagesTanker SampleMostafaSaidMohamedNo ratings yet
- Passenger Ship Hull Survey GuidelinesDocument10 pagesPassenger Ship Hull Survey GuidelinesLong NguyenNo ratings yet
- DNV Rules Planning Marine OperationsDocument150 pagesDNV Rules Planning Marine Operationsseaday1No ratings yet
- Maersk Report Nov1996Document33 pagesMaersk Report Nov1996KhoironSyamdatuNo ratings yet
- Analysis of offshore jacket platform responsesDocument8 pagesAnalysis of offshore jacket platform responsesrobert.johns1028No ratings yet
- OIL CBM Brochure 2015Document3 pagesOIL CBM Brochure 2015prasetyoNo ratings yet
- Slender Ship Squat StudyDocument15 pagesSlender Ship Squat StudyjmvNo ratings yet
- SPM Operational LimitationsDocument5 pagesSPM Operational LimitationshabibmusthafaNo ratings yet
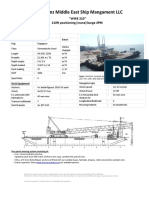
- Allianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMDocument2 pagesAllianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMCyril J PadiyathNo ratings yet
- Tank Inspection HandbookDocument148 pagesTank Inspection HandbookThanapong UsupanNo ratings yet
- Berth GuideDocument123 pagesBerth Guidetaitommy100% (1)
- Burea Veritas - Rules On Materials Ans Welding For The Classification On Marine Units PDFDocument236 pagesBurea Veritas - Rules On Materials Ans Welding For The Classification On Marine Units PDFAnonymous 7tBrl8No ratings yet
- PERMANENT Means of AccessDocument13 pagesPERMANENT Means of AccessGemstarManeshNo ratings yet
- Response Amplitude Operator - Wikipedia, The Free EncyclopediaDocument3 pagesResponse Amplitude Operator - Wikipedia, The Free EncyclopediaFuadNo ratings yet
- Windship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985From EverandWindship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985C SatchwellNo ratings yet
- BPCL Kochi SPM Pig Study 01Document9 pagesBPCL Kochi SPM Pig Study 01Arun Kumar PancharajNo ratings yet
- Design of Mooring System of Oil Storage Barges in Shallow WaterDocument10 pagesDesign of Mooring System of Oil Storage Barges in Shallow Watermrmoh3nNo ratings yet
- SloshingDocument18 pagesSloshingsergiostolovasNo ratings yet
- Yokohama FENDER PRODUCT LITERATURE PDFDocument8 pagesYokohama FENDER PRODUCT LITERATURE PDFitaaliyenNo ratings yet
- SEACOR Power SRC Board Meeting SummaryDocument7 pagesSEACOR Power SRC Board Meeting SummaryAmanda JohnsonNo ratings yet
- Offshore Hydromechanics PDFDocument570 pagesOffshore Hydromechanics PDFBruno Portilla100% (1)
- OMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFDocument10 pagesOMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFAnonymous JEe6LWPNo ratings yet
- Marine Operations CourseDocument36 pagesMarine Operations CoursemulyadiNo ratings yet
- A Comparison Between Conventional Buoy Mooring CBMDocument10 pagesA Comparison Between Conventional Buoy Mooring CBMdaniellaNo ratings yet
- Procedures For USARI FADocument27 pagesProcedures For USARI FAKenaia Adeleye100% (2)
- Hutton TLP InstallationDocument10 pagesHutton TLP InstallationDzaki AuliaNo ratings yet
- (Week 8) Loadlines & Draft MarksDocument26 pages(Week 8) Loadlines & Draft MarksJansen Dollete100% (1)
- Overview of Jacket InstallationsDocument20 pagesOverview of Jacket Installationsbee4manu100% (1)
- Moses ManualDocument392 pagesMoses ManualAri Rizki RivaldoNo ratings yet
- Uptime Helideck - Active Roll Compensated Helideck Ensure Safe and Effective Crew-Change On Offshore VesselsDocument13 pagesUptime Helideck - Active Roll Compensated Helideck Ensure Safe and Effective Crew-Change On Offshore VesselsprobakarNo ratings yet
- Design and Analysis of Steel Support Structures Used in Photovoltaic (PV) Solar Panels (SPS) : A Case Study in TurkeyDocument11 pagesDesign and Analysis of Steel Support Structures Used in Photovoltaic (PV) Solar Panels (SPS) : A Case Study in TurkeyAzizul KhanNo ratings yet
- Ace - Product - CatalogueDocument6 pagesAce - Product - CatalogueSiddhant AgarwalNo ratings yet
- Mooring Buoy Planning GuideDocument92 pagesMooring Buoy Planning GuidenyaungzinNo ratings yet
- Modelling Ship Grounding With Finite ElementsDocument4 pagesModelling Ship Grounding With Finite ElementsSiddhant AgarwalNo ratings yet
- Determining Wind and Snow Loads For Solar PanelsDocument17 pagesDetermining Wind and Snow Loads For Solar PanelsPauloAndresSepulveda100% (2)
- 0029 ND PDFDocument54 pages0029 ND PDFditherNo ratings yet
- Surface Roughness and Local WindsDocument4 pagesSurface Roughness and Local WindsSiddhant AgarwalNo ratings yet
- Percentage Boq: Validate Print HelpDocument1 pagePercentage Boq: Validate Print HelpSiddhant AgarwalNo ratings yet
- Energies 08 02438Document16 pagesEnergies 08 02438Siddhant AgarwalNo ratings yet
- MooringDocument2 pagesMooringSiddhant AgarwalNo ratings yet
- Australian/New Zealand Standard: Aluminium Structures Part 2: Allowable Stress DesignDocument8 pagesAustralian/New Zealand Standard: Aluminium Structures Part 2: Allowable Stress DesignSiddhant AgarwalNo ratings yet
- MooringsDocument8 pagesMooringsFabio OkamotoNo ratings yet
- Structure Design (Ship)Document135 pagesStructure Design (Ship)Siddhant AgarwalNo ratings yet
- Simplified Ship Collision ModelDocument104 pagesSimplified Ship Collision ModelMahdiNo ratings yet
- Ada446592 PDFDocument20 pagesAda446592 PDFSiddhant AgarwalNo ratings yet
- Document Title: Documentation Management PlanDocument24 pagesDocument Title: Documentation Management PlanFahd Bin RiasatNo ratings yet
- Basics for ComplianceDocument42 pagesBasics for ComplianceEmenike Donald EjiejiNo ratings yet
- Lear-118-H Master Document ListDocument2 pagesLear-118-H Master Document ListSiddhant AgarwalNo ratings yet
- CP-117 - Project Engineering - CoPDocument92 pagesCP-117 - Project Engineering - CoPkanakarao1100% (5)
- Hull Dimensioning SheetDocument8 pagesHull Dimensioning SheetSiddhant AgarwalNo ratings yet
- Factory Design Suite 2013Document40 pagesFactory Design Suite 2013InventorwizardNo ratings yet
- Towing Recomend SDocument6 pagesTowing Recomend S9245126694100% (1)
- Manuscript MA (JB)Document24 pagesManuscript MA (JB)Siddhant AgarwalNo ratings yet
- Tow Speed and Bollard Pull Analysis 2010Document26 pagesTow Speed and Bollard Pull Analysis 2010borman2008100% (1)
- U.S. Army Corps of Engineers, Coastal Engineering Manual (CEM), Engineer Manual 1110-2-1100Document3 pagesU.S. Army Corps of Engineers, Coastal Engineering Manual (CEM), Engineer Manual 1110-2-1100Siddhant AgarwalNo ratings yet
- How To Use Ansys AqwaDocument4 pagesHow To Use Ansys AqwaSutiyo Ahad100% (1)
- Ultraedit VersionDocument1 pageUltraedit VersionSiddhant AgarwalNo ratings yet
- 15CE321-phase 1Document61 pages15CE321-phase 1Siddhant Agarwal0% (1)
- Dynamic Overset Grids in OpenFOAM for Ship Self-Propulsion and Maneuvering SimulationsDocument20 pagesDynamic Overset Grids in OpenFOAM for Ship Self-Propulsion and Maneuvering SimulationsSiddhant AgarwalNo ratings yet
- Ocean Loading in Ansys 14.5Document29 pagesOcean Loading in Ansys 14.5Phúc Phan Tử100% (1)
- Definite IntegralsDocument51 pagesDefinite IntegralsKovid BalliNo ratings yet
- KNAW Proceedings from 1919-1920Document481 pagesKNAW Proceedings from 1919-1920Eduardo Salgado EnríquezNo ratings yet
- Diaphragmatic Breathing - The Foundation of Core Stability PDFDocument7 pagesDiaphragmatic Breathing - The Foundation of Core Stability PDFElaine CspNo ratings yet
- CMT 565:waste and Wastewater Technology: Experiment No: 5 Title: Biochemical Oxygen Demand (Bod)Document4 pagesCMT 565:waste and Wastewater Technology: Experiment No: 5 Title: Biochemical Oxygen Demand (Bod)kuekNo ratings yet
- Mars - Andrew D. Basiago - Letter To The Ngs - 12 12 08Document4 pagesMars - Andrew D. Basiago - Letter To The Ngs - 12 12 08Gavin SimmonsNo ratings yet
- ID Kajian Hukum Perjanjian Perkawinan Di Kalangan Wni Islam Studi Di Kota Medan PDFDocument17 pagesID Kajian Hukum Perjanjian Perkawinan Di Kalangan Wni Islam Studi Di Kota Medan PDFsabila azilaNo ratings yet
- Zen and The Art of Trumpet Play - Mark Van CleaveDocument55 pagesZen and The Art of Trumpet Play - Mark Van Cleavesz.sledz100% (1)
- Draft Resolution 1.1 SPECPOL LUMUN 2013Document8 pagesDraft Resolution 1.1 SPECPOL LUMUN 2013Hamza Hashim100% (1)
- Fathers House MansionsDocument3 pagesFathers House Mansionswilf12100% (1)
- Climate and Urban FormDocument10 pagesClimate and Urban FormYunita RatihNo ratings yet
- The CIA Tavistock Institute and The GlobalDocument34 pagesThe CIA Tavistock Institute and The GlobalAnton Crellen100% (4)
- Christoffel Symbols: PHYS 471: Introduction To Relativity and CosmologyDocument9 pagesChristoffel Symbols: PHYS 471: Introduction To Relativity and Cosmologyarileo3100% (1)
- Property Management Agreement TemplateDocument2 pagesProperty Management Agreement TemplatemarcelNo ratings yet
- A Project Report On Market Research & Brand Activation: Submitted in Partial Fulfillment of The RequirementsDocument55 pagesA Project Report On Market Research & Brand Activation: Submitted in Partial Fulfillment of The Requirementskartik chauhan100% (1)
- Clinical Study of Incidence of Extraocular Foreign Bodies in Teritiary HospitalDocument5 pagesClinical Study of Incidence of Extraocular Foreign Bodies in Teritiary HospitalIJAR JOURNALNo ratings yet
- Intro - New Covenant TheologyDocument15 pagesIntro - New Covenant TheologyDavid SalazarNo ratings yet
- CS3C Mover Practice 2Document4 pagesCS3C Mover Practice 2Nguyễn Lê Hà ViNo ratings yet
- What Is Link AdaptationDocument4 pagesWhat Is Link AdaptationAshutosh SinghNo ratings yet
- CBSE Class 10 Maths Sample Paper 2019-20Document33 pagesCBSE Class 10 Maths Sample Paper 2019-20omvrat singhNo ratings yet
- Almeda v. CaDocument10 pagesAlmeda v. CaRuss TuazonNo ratings yet
- TO B.inggris Dzakiy Bag 2Document21 pagesTO B.inggris Dzakiy Bag 2Ayu RatnaNo ratings yet
- Healthy Horizons-Butler University Ambulatory Care Appe Rotation SyllabusDocument13 pagesHealthy Horizons-Butler University Ambulatory Care Appe Rotation Syllabusapi-316593964No ratings yet
- Assessment - The Bridge Between Teaching and Learning (VFTM 2013)Document6 pagesAssessment - The Bridge Between Teaching and Learning (VFTM 2013)Luis CYNo ratings yet
- O'laco Vs Cocho ChitDocument16 pagesO'laco Vs Cocho ChitAngel Pagaran AmarNo ratings yet
- Mod 1 1 Concepts of Everyday LeadershipDocument26 pagesMod 1 1 Concepts of Everyday LeadershipSaifuzzaman AntorNo ratings yet
- About Meat Eating in Sikh DharmDocument4 pagesAbout Meat Eating in Sikh Dharmvijay123inNo ratings yet
- # Law and MoralityDocument16 pages# Law and MoralityBRYAN LING PING YEE UnknownNo ratings yet
- Atmakaraka PDFDocument46 pagesAtmakaraka PDFrohitsingh_8150% (4)
- Cambridge Lower Secondary Checkpoint: English 1111/01Document11 pagesCambridge Lower Secondary Checkpoint: English 1111/01Erling Kizito100% (1)