You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- RizalDocument10 pagesRizalBennard Cariño FajardoNo ratings yet
- Hni 24Document14 pagesHni 24Avik SarkarNo ratings yet
- Rediscovering RizalDocument36 pagesRediscovering RizalLi BredNo ratings yet
- A 0000108Document83 pagesA 0000108tinduong100% (1)
- ChocoDocument204 pagesChocoAvik SarkarNo ratings yet
- (Charles Blooah) : Library of CongressDocument5 pages(Charles Blooah) : Library of CongressAvik SarkarNo ratings yet
- MP044 PtolusPG PDFDocument34 pagesMP044 PtolusPG PDFAvik Sarkar100% (2)
- STDCDocument14 pagesSTDCAvik SarkarNo ratings yet
- Coal Chapter 3Document24 pagesCoal Chapter 3Ihwan Limanto100% (1)
- Sam Loyd S Encyclopedia of 5000 PuzzlesDocument194 pagesSam Loyd S Encyclopedia of 5000 PuzzlesSariyat Sayed100% (1)
- ReadmeDocument1 pageReadmeAvik SarkarNo ratings yet
- Pune MIDCDocument36 pagesPune MIDCAvik Sarkar100% (2)
- Wattway Debuts On The Ray 12 13 2016Document3 pagesWattway Debuts On The Ray 12 13 2016Avik SarkarNo ratings yet
- LetterDocument1 pageLetterAvik SarkarNo ratings yet
- Teilchenphysik Und Detektorphysik: Kolas - Commented Learner Corpus of Academic GermanDocument1 pageTeilchenphysik Und Detektorphysik: Kolas - Commented Learner Corpus of Academic GermanAvik SarkarNo ratings yet
- Aplac M026 0Document3 pagesAplac M026 0Avik SarkarNo ratings yet
- 14 AkinosoDocument5 pages14 AkinosoAvik SarkarNo ratings yet
- CST Mag3 Fev16 en WebDocument44 pagesCST Mag3 Fev16 en WebAvik SarkarNo ratings yet
- Colas Is Presenting A Section of Its Wattway Solar Road at The COP21Document2 pagesColas Is Presenting A Section of Its Wattway Solar Road at The COP21Avik SarkarNo ratings yet
- 361BB1E7613Document3 pages361BB1E7613Avik SarkarNo ratings yet
- World Health Statistics Oms 2014Document180 pagesWorld Health Statistics Oms 2014Pedro Pablo Castro EnriquezNo ratings yet
- Wattway DP UKDocument9 pagesWattway DP UKAvik SarkarNo ratings yet
- News Notes April2003Document3 pagesNews Notes April2003Avik SarkarNo ratings yet
- Making PDF Work in The Office: Create, Convert, Collaborate and Securely Share PDF FilesDocument5 pagesMaking PDF Work in The Office: Create, Convert, Collaborate and Securely Share PDF FilesmarooharshNo ratings yet
- BrillianceDocument1 pageBrillianceAvik SarkarNo ratings yet
- Culture at Work Report v2Document24 pagesCulture at Work Report v2Avik SarkarNo ratings yet
- The Next DayDocument1 pageThe Next DayAvik SarkarNo ratings yet
- BrillianceDocument1 pageBrillianceAvik SarkarNo ratings yet
- Good ThingsDocument1 pageGood ThingsAvik SarkarNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
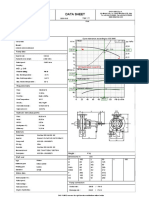
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Document3 pagesData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaNo ratings yet
- Plane TrigonometryDocument545 pagesPlane Trigonometrygnavya680No ratings yet
- 2SA1016Document4 pages2SA1016catalina maryNo ratings yet
- Rules and Fallacies For Categorical SyllogismsDocument5 pagesRules and Fallacies For Categorical SyllogismsFatima Ismael PortacioNo ratings yet
- Aerated Concrete Production Using Various Raw MaterialsDocument5 pagesAerated Concrete Production Using Various Raw Materialskinley dorjee100% (1)
- Excel Crash Course PDFDocument2 pagesExcel Crash Course PDFmanoj_yadav735No ratings yet
- Xii - STD - Iit - B1 - QP (19-12-2022) - 221221 - 102558Document13 pagesXii - STD - Iit - B1 - QP (19-12-2022) - 221221 - 102558Stephen SatwikNo ratings yet
- STFC-2023 International E - conference-BITDocument6 pagesSTFC-2023 International E - conference-BITRanilprabhu MNo ratings yet
- RV900S - IB - Series 3Document28 pagesRV900S - IB - Series 3GA LewisNo ratings yet
- Stevenson Chapter 13Document52 pagesStevenson Chapter 13TanimNo ratings yet
- Methods of Estimation For Building WorksDocument22 pagesMethods of Estimation For Building Worksvara prasadNo ratings yet
- The Role of Needs Analysis in Adult ESL Programme Design: Geoffrey BrindleyDocument16 pagesThe Role of Needs Analysis in Adult ESL Programme Design: Geoffrey Brindleydeise krieser100% (2)
- HyperconnectivityDocument5 pagesHyperconnectivityramNo ratings yet
- SHAW Superdew 3 Specification SheetDocument3 pagesSHAW Superdew 3 Specification SheetGeetha ManoharNo ratings yet
- ZH210LC 5BDocument24 pagesZH210LC 5BPHÁT NGUYỄN THẾ0% (1)
- Agenda - Meeting SLC (LT) - 27.06.2014 PDFDocument27 pagesAgenda - Meeting SLC (LT) - 27.06.2014 PDFharshal1223No ratings yet
- Online Dynamic Security Assessment of Wind Integrated Power System UsingDocument9 pagesOnline Dynamic Security Assessment of Wind Integrated Power System UsingRizwan Ul HassanNo ratings yet
- WAM ES Screw Conveyors Manual JECDocument43 pagesWAM ES Screw Conveyors Manual JECabbas tawbiNo ratings yet
- Jungles & SavannasDocument80 pagesJungles & SavannasJessica100% (1)
- Teaching Mathematics Content Through Explicit TeachingDocument39 pagesTeaching Mathematics Content Through Explicit Teachingronna drio100% (1)
- Daily Lesson Log (English)Document8 pagesDaily Lesson Log (English)Julius Baldivino88% (8)
- In Search of Begum Akhtar PDFDocument42 pagesIn Search of Begum Akhtar PDFsreyas1273No ratings yet
- TIB Bwpluginrestjson 2.1.0 ReadmeDocument2 pagesTIB Bwpluginrestjson 2.1.0 ReadmemarcmariehenriNo ratings yet
- Case Paul Foster Highlights of TarotDocument76 pagesCase Paul Foster Highlights of TarotTraditionaltarot100% (6)
- 2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessDocument11 pages2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessOne PlusNo ratings yet
- Business Logic Module 1Document5 pagesBusiness Logic Module 1Cassandra VenecarioNo ratings yet
- S010T1Document1 pageS010T1DUCNo ratings yet
- 2021 Bookmatter BasicSciencesOfNuclearMedicineDocument12 pages2021 Bookmatter BasicSciencesOfNuclearMedicineBeatriz MartinhoNo ratings yet
- Electromechani Cal System: Chapter 2: Motor Control ComponentsDocument35 pagesElectromechani Cal System: Chapter 2: Motor Control ComponentsReynalene PanaliganNo ratings yet
- Efektifitas Terapi Musik Klasik Terhadap Penurunan Tingkat HalusinasiDocument9 pagesEfektifitas Terapi Musik Klasik Terhadap Penurunan Tingkat HalusinasiAnis RahmaNo ratings yet