You might also like
- Catalog MPDocument28 pagesCatalog MPCARLOSWAR101No ratings yet
- Sd2ma (E Phaa Esda01)Document111 pagesSd2ma (E Phaa Esda01)ngocanh_songlongNo ratings yet
- Buw Rollg enDocument20 pagesBuw Rollg ensaranNo ratings yet
- Sync Step Speed Adj Motor For UG Govs 03027 - BDocument8 pagesSync Step Speed Adj Motor For UG Govs 03027 - Bcrazycanuck100% (1)
- Schneider Atv303 PDFDocument112 pagesSchneider Atv303 PDFchidambaram kasiNo ratings yet
- ASDA A2 ManualDocument583 pagesASDA A2 ManualClaudio Lourenço da Silva100% (1)
- U35000 PDFDocument16 pagesU35000 PDFsujit5584No ratings yet
- D-357557 ManualDocument65 pagesD-357557 ManualAnh NguyenNo ratings yet
- Control de Motor DC PDFDocument48 pagesControl de Motor DC PDFLuis Florian SalasNo ratings yet
- 200 Through To 275HP VeradoDocument833 pages200 Through To 275HP VeradoAbdoulah Abdoulah100% (24)
- ABB ACS800 11 Regenerative InverterDocument146 pagesABB ACS800 11 Regenerative InverterGabo RamirezNo ratings yet
- Kbic ManualDocument28 pagesKbic ManualArturo TerrazasNo ratings yet
- HandbookDocument27 pagesHandbookArtur MkrtchyanNo ratings yet
- Hyundai Installation and Maintenance ManualDocument15 pagesHyundai Installation and Maintenance ManualHüseyin Vedat TekinNo ratings yet
- ManualDocument385 pagesManualSayak BoseNo ratings yet
- VFD F User Manual PDFDocument190 pagesVFD F User Manual PDFVictor Raziel ReaverNo ratings yet
- Delta Electronics Vfd007s23a User ManualDocument186 pagesDelta Electronics Vfd007s23a User ManualnamvinhNo ratings yet
- AC Motor Installation Maintenance GuideDocument4 pagesAC Motor Installation Maintenance GuideEkakitie EseNo ratings yet
- Evinrude 150 & 175 FFI (Ficht) OEM Service Manual 520211Document188 pagesEvinrude 150 & 175 FFI (Ficht) OEM Service Manual 520211Jacques DionneNo ratings yet
- Technical Manual, Mounting and First Installation: Synchronous - ServomotorsDocument14 pagesTechnical Manual, Mounting and First Installation: Synchronous - Servomotorsramon martinezNo ratings yet
- 2013 Ski Doo REV XM XS SM 05620Document562 pages2013 Ski Doo REV XM XS SM 05620Maks100% (1)
- Delta AC Servo Manual Installation GuideDocument311 pagesDelta AC Servo Manual Installation GuideWill SousaNo ratings yet
- VFD-E Manual en PDFDocument347 pagesVFD-E Manual en PDFJosé ArgüelloNo ratings yet
- Y-Series Brushless Servo Motor: Installation InstructionsDocument16 pagesY-Series Brushless Servo Motor: Installation InstructionsrafaelNo ratings yet
- Mega TorqueDocument354 pagesMega TorqueGuilherme AugustoNo ratings yet
- 8369382-Mercury Mariner 200hp Optimax Jet Drive Service ManualDocument364 pages8369382-Mercury Mariner 200hp Optimax Jet Drive Service ManualIvan Zorn90% (10)
- BB Instructions Daily 2011 Sections 4 and 5Document122 pagesBB Instructions Daily 2011 Sections 4 and 5Сергей Орловский100% (2)
- Operating Instructions Brake Module Bgl-S20K275 Egl-S20K275: Pintsch Bamag Antriebs-Und Verkehrstechnik GMBHDocument11 pagesOperating Instructions Brake Module Bgl-S20K275 Egl-S20K275: Pintsch Bamag Antriebs-Und Verkehrstechnik GMBHArtemy KhotenovNo ratings yet
- 520 qs001 - en eDocument36 pages520 qs001 - en errebollarNo ratings yet
- Cable Reel ManualDocument27 pagesCable Reel ManualcristianNo ratings yet
- Asda-B M en 20090628Document321 pagesAsda-B M en 20090628basso4260No ratings yet
- g400 en PDFDocument13 pagesg400 en PDFReynold SuarezNo ratings yet
- Master Drive Unit - Mpb040-E (B827)Document14 pagesMaster Drive Unit - Mpb040-E (B827)Juan Esteban AgudeloNo ratings yet
- AC Servo Drive Product OverviewDocument300 pagesAC Servo Drive Product OverviewIvan CardenasNo ratings yet
- Installation and Operation Guide: Gear Change Ignition Cut ModuleDocument13 pagesInstallation and Operation Guide: Gear Change Ignition Cut ModuleoctavianNo ratings yet
- Abb Acs800-U11 ManualDocument114 pagesAbb Acs800-U11 ManualHenriViscarra100% (1)
- Allen Bradley Manuals 1058Document16 pagesAllen Bradley Manuals 1058NGUYEN HUU DAONo ratings yet
- Hardware Manual ACS800-07 Drives (500 To 2800 KW)Document193 pagesHardware Manual ACS800-07 Drives (500 To 2800 KW)Bhanu Prakash100% (1)
- Baldor-Reliance AC & DC Motor Installation & MaintenanceDocument4 pagesBaldor-Reliance AC & DC Motor Installation & MaintenanceAriawan HasnanNo ratings yet
- Ounting & Maintenance Instructions For Threephase Induction Motors - Types Dm1 / Dma1 / Dma2Document9 pagesOunting & Maintenance Instructions For Threephase Induction Motors - Types Dm1 / Dma1 / Dma2Chad HuntNo ratings yet
- Manual Markon NAC160 NAC190Document23 pagesManual Markon NAC160 NAC190Sajjad HussainNo ratings yet
- Powerbox Manual 2Document9 pagesPowerbox Manual 2maorpeNo ratings yet
- Delta Asda-B2 M en 20130906Document335 pagesDelta Asda-B2 M en 20130906Joao RobertoNo ratings yet
- Selection of Induction Motors For Industrial Applications Part 1Document5 pagesSelection of Induction Motors For Industrial Applications Part 1shadi22No ratings yet
- Selection of MotorsDocument16 pagesSelection of Motorsmithun46No ratings yet
- Maintenance of Motors and GeneratorsDocument116 pagesMaintenance of Motors and GeneratorsAtiqur RahmanNo ratings yet
- AC Servo ASD-B2Document337 pagesAC Servo ASD-B2Thai Trinh CongNo ratings yet
- Mercury Service Manual 40-50-55-60-90Document566 pagesMercury Service Manual 40-50-55-60-90Will Gates86% (208)
- Piaggio Liberty 125 - 150 4T I.E. Vietnam MY 2010 (EN)Document275 pagesPiaggio Liberty 125 - 150 4T I.E. Vietnam MY 2010 (EN)Manualles80% (10)
- Merc Controls Newest ManualDocument659 pagesMerc Controls Newest ManualTom Bores90% (21)
- 143T-449T TECO Welding House GeneralDocument9 pages143T-449T TECO Welding House GeneralChristian TorresNo ratings yet
- Power FlexDocument36 pagesPower FlexamiguitoNo ratings yet
- Vfd037e23a Um PDFDocument399 pagesVfd037e23a Um PDFKanav SharmaNo ratings yet
- Delta Electronics VFD M Manuel D UtilisationDocument173 pagesDelta Electronics VFD M Manuel D Utilisationdppn5jghbcNo ratings yet
- Asda-Ab M en 20100730Document355 pagesAsda-Ab M en 20100730Mohammed TaraboulsiNo ratings yet
- ES Series Hardware Manual170413Document64 pagesES Series Hardware Manual170413Oscar MontañezNo ratings yet
- Biến tần Emerson EV1000Document160 pagesBiến tần Emerson EV1000Masterking King50% (4)
- 4972b en MD2SDocument48 pages4972b en MD2SGiovanni RotondoNo ratings yet
- 140H Cat: GraderDocument22 pages140H Cat: GraderFacundo VarasNo ratings yet
- Data Sheet B11R 6x2 Euro 6 EN 2020Document4 pagesData Sheet B11R 6x2 Euro 6 EN 2020Juan Manuel Villanueva uraccahuaNo ratings yet
- Design of Combined Brake and Accelerator Pedal: International Research Journal of Engineering and Technology (IRJET)Document3 pagesDesign of Combined Brake and Accelerator Pedal: International Research Journal of Engineering and Technology (IRJET)Dinesh TNo ratings yet
- Air Braking System CalculationDocument27 pagesAir Braking System Calculationeantphone kyawNo ratings yet
- 2020 Tucson Quick Reference GuideDocument26 pages2020 Tucson Quick Reference GuideJose AcevedoNo ratings yet
- IVECO TRAKKER TRACTOR HEAD 4X2 and 6X4 (05-18-2016) PDFDocument2 pagesIVECO TRAKKER TRACTOR HEAD 4X2 and 6X4 (05-18-2016) PDFJohn YangNo ratings yet
- Copy Right® Reserve Akademi Saga / Eon BerhadDocument114 pagesCopy Right® Reserve Akademi Saga / Eon BerhadShahrizan Abdul Rahman100% (3)
- With EU Stage V Engine Installed: 200 HP (149 KW) / 2,200 RPMDocument4 pagesWith EU Stage V Engine Installed: 200 HP (149 KW) / 2,200 RPMSara Sarmiento EcheverryNo ratings yet
- Brakes and Dynamometers GuideDocument21 pagesBrakes and Dynamometers GuideNarendra KatdareNo ratings yet
- Thruster Disc Brakes SB 8 Series: Pintsch BubenzerDocument7 pagesThruster Disc Brakes SB 8 Series: Pintsch Bubenzersholhan azizNo ratings yet
- Go Cart Build ManualDocument24 pagesGo Cart Build Manualtimeport24100% (3)
- Brake Accumulator Test and ChargeDocument8 pagesBrake Accumulator Test and ChargeBarzola Soto Omar100% (1)
- Fiesta R5 National Spares PackageDocument4 pagesFiesta R5 National Spares PackageAtsNo ratings yet
- Roush Stage 3 Mustang Owner's Guide SupplementDocument34 pagesRoush Stage 3 Mustang Owner's Guide SupplementstravzNo ratings yet
- Nissan Almera N16Document28 pagesNissan Almera N16Kostas10100% (1)
- AW 189 HELICOPTER 00 - Air Vehicle General CharacteristicsDocument46 pagesAW 189 HELICOPTER 00 - Air Vehicle General Characteristicsmortada101100% (7)
- FD200 FD250Document8 pagesFD200 FD250Tulus Ztx ZaputroNo ratings yet
- Drawworks Technology CatalogDocument20 pagesDrawworks Technology Cataloga_salehi100% (1)
- 740 V Komatsu HM400Document19 pages740 V Komatsu HM400firman manalu100% (2)
- Automotive Question BankDocument3 pagesAutomotive Question BankmdkhayumNo ratings yet
- FEM Analysis On Locomotive Train Brake For Improved Efficiency by Using CATIA and ANSYS-WorkbenchDocument7 pagesFEM Analysis On Locomotive Train Brake For Improved Efficiency by Using CATIA and ANSYS-WorkbenchAchraf MoutaharNo ratings yet
- Lab Week 11Document3 pagesLab Week 11Sachin VSNo ratings yet
- CX-5 A Squeaking or Grinding Noise From Rear BrakeDocument4 pagesCX-5 A Squeaking or Grinding Noise From Rear BrakeRazvan IstocNo ratings yet
- Operation and Maintenance Manual Excerpt Cat 420eDocument49 pagesOperation and Maintenance Manual Excerpt Cat 420eJuan Zago100% (1)
- Kawasaki Wheel Loader 90zv 2 Spec SheetDocument12 pagesKawasaki Wheel Loader 90zv 2 Spec Sheetjoaquinfern100% (2)
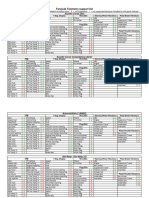
- FanaLab Telemetry Support ListDocument8 pagesFanaLab Telemetry Support ListRidasNo ratings yet
- ADB Financed Electric Vehicle Design in The PhilippinesDocument9 pagesADB Financed Electric Vehicle Design in The PhilippinesJerry EsquivelNo ratings yet
- VOLVO L150ftol220f 21e1002739 2010 01Document36 pagesVOLVO L150ftol220f 21e1002739 2010 01Rico KabesNo ratings yet
- 150 Point Check ListDocument5 pages150 Point Check Listlovingboy22100% (1)
- Versysy 650 2017-2018 PDFDocument98 pagesVersysy 650 2017-2018 PDFaryvhidayatNo ratings yet