You might also like
- ADDx Compact Single Channel DF Antennas Bro en 3608 5458 12 v0300Document6 pagesADDx Compact Single Channel DF Antennas Bro en 3608 5458 12 v0300Hưng Nguyễn ĐìnhNo ratings yet
- Mti Radar PDFDocument102 pagesMti Radar PDFHưng Nguyễn ĐìnhNo ratings yet
- Multi-Standard ReceiverDocument8 pagesMulti-Standard ReceiverHưng Nguyễn ĐìnhNo ratings yet
- Fundamentals of MmWave SensorsDocument9 pagesFundamentals of MmWave SensorssanikereNo ratings yet
- Syntheric Aperture RadarDocument37 pagesSyntheric Aperture RadarHưng Nguyễn ĐìnhNo ratings yet
- Book 3Document16 pagesBook 3HariPonnanaNo ratings yet
- Radar, Electronic Warfare (EW) and ELINT Testing ChallengesDocument25 pagesRadar, Electronic Warfare (EW) and ELINT Testing ChallengesHưng Nguyễn ĐìnhNo ratings yet
- Hoole Implementation 2008Document104 pagesHoole Implementation 2008Hưng Nguyễn ĐìnhNo ratings yet
- An FPGA Based Controller For A MEMS Tri-Mode FMCW RadarDocument206 pagesAn FPGA Based Controller For A MEMS Tri-Mode FMCW RadarHưng Nguyễn ĐìnhNo ratings yet
- Phased ArrayDocument20 pagesPhased ArraysatyahalNo ratings yet
- 12 An FMCW Mimo Radar Sensor Dave PatrickDocument22 pages12 An FMCW Mimo Radar Sensor Dave PatrickHưng Nguyễn ĐìnhNo ratings yet
- Signal Processing of FMCW Synthetic Aperture Radar DataDocument133 pagesSignal Processing of FMCW Synthetic Aperture Radar DataHưng Nguyễn ĐìnhNo ratings yet
- Signal Processing of FMCW Synthetic Aperture Radar DataDocument133 pagesSignal Processing of FMCW Synthetic Aperture Radar DataHưng Nguyễn ĐìnhNo ratings yet
- 12 An FMCW Mimo Radar Sensor Dave PatrickDocument22 pages12 An FMCW Mimo Radar Sensor Dave PatrickHưng Nguyễn ĐìnhNo ratings yet
- Radar Handbook PDFDocument1,352 pagesRadar Handbook PDFAwak100% (7)
- Design of A Microstrip Bandpass Filter For 3.1-10.6 GHZ Uwb SysteDocument57 pagesDesign of A Microstrip Bandpass Filter For 3.1-10.6 GHZ Uwb SysteHarishNo ratings yet
- ADS Tutorial 2Document4 pagesADS Tutorial 2Minh VuNo ratings yet
- FmRadioDocument99 pagesFmRadioHưng Nguyễn ĐìnhNo ratings yet
- Microstrip Design Using HP Advanced Design System (ADS) : 304-573A Microwave Electronics TutorialDocument23 pagesMicrostrip Design Using HP Advanced Design System (ADS) : 304-573A Microwave Electronics TutorialbaburaokodavatiNo ratings yet
- VHDL SS09 Teil06Document38 pagesVHDL SS09 Teil06Krishnakumar SomanpillaiNo ratings yet
- FFTandMatLab Wanjun HuangDocument26 pagesFFTandMatLab Wanjun HuangDiego PurizagaNo ratings yet
- Design of A Microstrip Bandpass Filter For 3.1-10.6 GHZ Uwb SysteDocument57 pagesDesign of A Microstrip Bandpass Filter For 3.1-10.6 GHZ Uwb SysteHarishNo ratings yet
- CORE Generator GuideDocument146 pagesCORE Generator GuideHưng Nguyễn ĐìnhNo ratings yet
- Spartan-3E Libraries Guide For HDL DesignsDocument517 pagesSpartan-3E Libraries Guide For HDL DesignsHưng Nguyễn ĐìnhNo ratings yet
- Design and Implementation of An FPGA-basedDocument59 pagesDesign and Implementation of An FPGA-basedHưng Nguyễn ĐìnhNo ratings yet
- Simulink TutorialDocument56 pagesSimulink TutorialUday KumarNo ratings yet
- Filters FPGADocument36 pagesFilters FPGAAly BendlalaNo ratings yet
- Automatic Gain Control Circuits Theory and DesignDocument25 pagesAutomatic Gain Control Circuits Theory and DesignKhristianus BeauNo ratings yet
- FFTandMatLab Wanjun HuangDocument26 pagesFFTandMatLab Wanjun HuangDiego PurizagaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Seminar Report 2017 Vlsi Implementation of A Cost Efficient Near-Lossless Cfa Image Compressor For Wireless Capsule EndosDocument31 pagesSeminar Report 2017 Vlsi Implementation of A Cost Efficient Near-Lossless Cfa Image Compressor For Wireless Capsule EndosAnanthu J VNo ratings yet
- CONTROLDocument12 pagesCONTROLTaseen JannatNo ratings yet
- Bird Meter 4391A-ManualDocument46 pagesBird Meter 4391A-Manualpy5rcbNo ratings yet
- Simulation For Iot Based Smart Traffic Control System For Emergency VehiclesDocument44 pagesSimulation For Iot Based Smart Traffic Control System For Emergency VehiclesJeba JinilNo ratings yet
- Chengzhou WangDocument159 pagesChengzhou WangAnonymous n30qTRQPoINo ratings yet
- Communications Systems - LBD8921/02 Wall Mounting Handset StationDocument3 pagesCommunications Systems - LBD8921/02 Wall Mounting Handset StationShreyaNo ratings yet
- Mpms Combi Controller Fault CodesDocument4 pagesMpms Combi Controller Fault CodesFatih YÜKSELNo ratings yet
- HP-AN243 - The Fundamentals of Signal AnalysisDocument68 pagesHP-AN243 - The Fundamentals of Signal Analysissirjole758483% (6)
- Reference Guide To Fiber Optic Testing: Second EditionDocument172 pagesReference Guide To Fiber Optic Testing: Second EditionJoao Silva100% (1)
- Lighting Lighting: A TLED Solution For Your ApplicationDocument35 pagesLighting Lighting: A TLED Solution For Your ApplicationCent LopezNo ratings yet
- 2 N 6394Document8 pages2 N 6394lgrome73No ratings yet
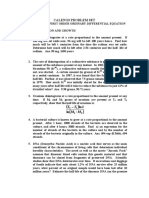
- Caleng3 - Problem Set - Q2Document5 pagesCaleng3 - Problem Set - Q2Rheina VelasquezNo ratings yet
- EN Calibration Source M340 - DatasheetDocument2 pagesEN Calibration Source M340 - DatasheetMansour AchaourNo ratings yet
- Daytime Running Lights,: Wiring DiagramDocument7 pagesDaytime Running Lights,: Wiring DiagramPetronela MasiliaNo ratings yet
- Tesys D Lc1d25bdDocument7 pagesTesys D Lc1d25bdw.priatmadiNo ratings yet
- SG125CX DatasheetDocument2 pagesSG125CX DatasheetJun OrtizNo ratings yet
- EN010101-000245-Document Ref 7.14 LC TA4.7 Outline Battery Safety Management PlanDocument33 pagesEN010101-000245-Document Ref 7.14 LC TA4.7 Outline Battery Safety Management PlanSerg MarushkoNo ratings yet
- Envicool AC AIRCON MC30HDNC1ADocument7 pagesEnvicool AC AIRCON MC30HDNC1ABores ModearNo ratings yet
- Joystick: RomeoDocument14 pagesJoystick: RomeoAdfbbNo ratings yet
- Acer Aspire 3750GDocument92 pagesAcer Aspire 3750GQomari Ali MustofaNo ratings yet
- Technology and Development of 800 KV HVDC Applications: M. Haeusler H. Huang V. Ramaswami D. KumarDocument12 pagesTechnology and Development of 800 KV HVDC Applications: M. Haeusler H. Huang V. Ramaswami D. KumarRatheesh KumarNo ratings yet
- PV Module Safety Qualification According To IEC 61730:2004 EN 61730:2007Document6 pagesPV Module Safety Qualification According To IEC 61730:2004 EN 61730:2007Vinko RazlNo ratings yet
- Activity 2.3.5 XOR, XNOR, and Binary AddersDocument3 pagesActivity 2.3.5 XOR, XNOR, and Binary AddersAvalon BrownNo ratings yet
- Site Test Report Date: Al-Osais Co. KHUDARIYAH S/S 115/13.8 KV S/S CT Supervision Relay - MVTPDocument4 pagesSite Test Report Date: Al-Osais Co. KHUDARIYAH S/S 115/13.8 KV S/S CT Supervision Relay - MVTPsikander843562No ratings yet
- Lab. Experiment 1: Verification of Mesh Analysis Date:27/09/2021 Lab. Slot: L31+L32 Name: Ayush Giri Reg. No.: 21BDS0031Document11 pagesLab. Experiment 1: Verification of Mesh Analysis Date:27/09/2021 Lab. Slot: L31+L32 Name: Ayush Giri Reg. No.: 21BDS0031psNo ratings yet
- Ec 6011Document8 pagesEc 6011Karthikeyan_Go_9525No ratings yet
- CR310 ManualDocument236 pagesCR310 Manualelisio_fonsecaNo ratings yet
- 4 ECE3013 Linear Integrated Circuits 9.10.17Document2 pages4 ECE3013 Linear Integrated Circuits 9.10.17Siva ShankarNo ratings yet
- Lab Viva QuestionDocument13 pagesLab Viva QuestionNarasimman Don100% (1)
- PRT Simulation, Two, Three and Four Wire Connecction ReportDocument6 pagesPRT Simulation, Two, Three and Four Wire Connecction Reportميسرة80% (5)