You might also like
- Centroide TrabajoDocument38 pagesCentroide TrabajoEsthefany MarcanoNo ratings yet
- Ejercicio 426Document2 pagesEjercicio 426Mega NetNo ratings yet
- Ecuaciones DiferecialesDocument4 pagesEcuaciones DiferecialesJonathan Vera CarballidoNo ratings yet
- Practica 4Document3 pagesPractica 4Jere Olivieri100% (1)
- P2 Isos IDocument1 pageP2 Isos IRuben LaricoNo ratings yet
- LAB01Document4 pagesLAB01MARCELO QUIROGANo ratings yet
- 2° Examen Parcial I-2020 Fundaciones PDFDocument1 page2° Examen Parcial I-2020 Fundaciones PDFRodrigo SenaNo ratings yet
- Discusión 4 Dinámica de TraslaciónDocument9 pagesDiscusión 4 Dinámica de TraslaciónWallo48No ratings yet
- Parctica 2. Penetracion EstandarDocument11 pagesParctica 2. Penetracion EstandarFernanda Landeros RamosNo ratings yet
- Integrales Iteradas ListoDocument22 pagesIntegrales Iteradas ListoMASTERDAN32No ratings yet
- Cola circular CDocument4 pagesCola circular CAlejandra MoralesNo ratings yet
- Informe Explicativo Diseño Eje Longitudinal y RasanteDocument25 pagesInforme Explicativo Diseño Eje Longitudinal y RasanteOscar Contreras AbarcaNo ratings yet
- Instructivo Practica 2 Ensayo de Estabilidad de Cuerpos Flotantes 1sem2013Document4 pagesInstructivo Practica 2 Ensayo de Estabilidad de Cuerpos Flotantes 1sem2013Beatriz DueniiasNo ratings yet
- Fuerza Definida en Terminos de Su Magnitud y Dos PuntosDocument2 pagesFuerza Definida en Terminos de Su Magnitud y Dos PuntosSaulo Trejo67% (3)
- Solucionario de ExamenDocument17 pagesSolucionario de ExamenJosé Antonio Quispealaya HernándezNo ratings yet
- Radio de Giro de Una Área, Teorema de Steiner, Momento de Áreas CompuestasDocument11 pagesRadio de Giro de Una Área, Teorema de Steiner, Momento de Áreas CompuestasSaussure Fer CcoriNo ratings yet
- Examen Final Sección IDocument2 pagesExamen Final Sección IPedro HuarancaNo ratings yet
- PROBLEMAS PROPUESTOS - CAP.24 (Ley de Gauss)Document3 pagesPROBLEMAS PROPUESTOS - CAP.24 (Ley de Gauss)cesar oliverNo ratings yet
- Componentes Rectangulares de Un Vector en El Espacio UdoDocument7 pagesComponentes Rectangulares de Un Vector en El Espacio Udoandrea britoNo ratings yet
- PD6. Fuerzas DistribuidasDocument7 pagesPD6. Fuerzas DistribuidasJordy Panta SaldarriagaNo ratings yet
- Tarea 5Document2 pagesTarea 5ALEXANDER HERRERA HUAMANNo ratings yet
- Problema 4.29Document1 pageProblema 4.29Camila Gutierrez100% (1)
- FDMC PDFDocument8 pagesFDMC PDFDaniel Francisco CevallosNo ratings yet
- Centroide y VigasDocument22 pagesCentroide y VigasDiego PanellaNo ratings yet
- Valdivia Fernando. CONIC2009 Diseno y Construccion ToboganDocument6 pagesValdivia Fernando. CONIC2009 Diseno y Construccion ToboganFernando ValdiviaNo ratings yet
- Trabajo VirtualDocument8 pagesTrabajo VirtualIs QueteinteresaNo ratings yet
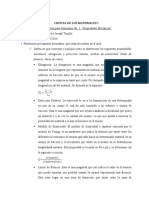
- Seminario de Propiedades Mecanicas-Pablo Rivera y Joseph TrujilloDocument9 pagesSeminario de Propiedades Mecanicas-Pablo Rivera y Joseph TrujilloJTtLNo ratings yet
- Ejercicios Propuestos de EstaticaDocument10 pagesEjercicios Propuestos de EstaticaKarlozNo ratings yet
- 4ta Practica Hiperestaticidad Debido A Fuerzas Axiales PDFDocument3 pages4ta Practica Hiperestaticidad Debido A Fuerzas Axiales PDFDaniel ZeaNo ratings yet
- Resistencia de Materiales - Tarea 4Document2 pagesResistencia de Materiales - Tarea 4Abel Villa100% (1)
- Examen 1er Parcial - Daniel SarabiaDocument5 pagesExamen 1er Parcial - Daniel SarabiaDaniel SarabiaNo ratings yet
- Libro de Fisica - Capitulo 1color r1Document76 pagesLibro de Fisica - Capitulo 1color r1Joshua ReyesNo ratings yet
- Cinemática de Partículas (Problemas Propuestos)Document5 pagesCinemática de Partículas (Problemas Propuestos)paquito castilloNo ratings yet
- Metodos Energeticos - Cuerpo RigidoDocument20 pagesMetodos Energeticos - Cuerpo RigidoCristian UrdaniviaNo ratings yet
- Examen Parcial DinamicaDocument4 pagesExamen Parcial DinamicaCarlos Rudas RamirezNo ratings yet
- Guia #1 Carga AxialDocument5 pagesGuia #1 Carga AxialCarlos IrahetaNo ratings yet
- Componentes Rectangulares Del Momento de Una Fuerza Producto Escalar de Dos VectoresDocument7 pagesComponentes Rectangulares Del Momento de Una Fuerza Producto Escalar de Dos VectoresOmarNo ratings yet
- Universidad de Las Fuerzas Armadas - Espe: 9547 CmecnDocument10 pagesUniversidad de Las Fuerzas Armadas - Espe: 9547 CmecnANTHONY VINICIO PANTOJA GARCIANo ratings yet
- Tarea Estática - Equilibrio en 3DDocument1 pageTarea Estática - Equilibrio en 3DEduardo Blanco CoronaNo ratings yet
- Practica 2 MEC211Document5 pagesPractica 2 MEC211yamilNo ratings yet
- Planos Colegio ModelDocument1 pagePlanos Colegio ModelEvert De La CruzNo ratings yet
- Ejercicios EsfuerzosDocument10 pagesEjercicios EsfuerzosBrayan AltamiranoNo ratings yet
- Campo Vectorial Conservativo e IncompresibleDocument2 pagesCampo Vectorial Conservativo e IncompresibleAlanJoabAlvaradoAragon100% (1)
- Los Factores Que Influyen en La Solubilidad de Sólidos en Aleaciones MetálicasDocument7 pagesLos Factores Que Influyen en La Solubilidad de Sólidos en Aleaciones MetálicasjhoelgmNo ratings yet
- Parte II. Coordenadas Curvilineas Ortogonales. PDFDocument17 pagesParte II. Coordenadas Curvilineas Ortogonales. PDFJhanet AHNo ratings yet
- Practica Mecanica Vectorial I 1 2021Document1 pagePractica Mecanica Vectorial I 1 2021Jhon smittNo ratings yet
- Resumen de Analisis de Armaduras 3DDocument5 pagesResumen de Analisis de Armaduras 3DJesús Manuel MaresNo ratings yet
- Unidad IiDocument24 pagesUnidad IiJose AmbrocioNo ratings yet
- Deformaciones en barras y varillas bajo cargaDocument2 pagesDeformaciones en barras y varillas bajo cargaivanNo ratings yet
- 1.ejercicios Sobre Interacciones EléctricasDocument6 pages1.ejercicios Sobre Interacciones EléctricasmNo ratings yet
- Movimiento Armonico Simple de Un Resorte y Oscilaciones ArmonicasDocument18 pagesMovimiento Armonico Simple de Un Resorte y Oscilaciones ArmonicasFELIPENo ratings yet
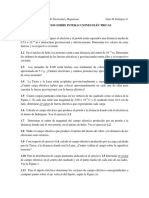
- PRUEBAS TRIAXIALES DE SUELOSDocument9 pagesPRUEBAS TRIAXIALES DE SUELOSBernard Andrés Luzardo CadenaNo ratings yet
- Ejercicios de Meca 7 y 8Document3 pagesEjercicios de Meca 7 y 8Pepe RazonesNo ratings yet
- TrabajoDocument2 pagesTrabajoMaryorieDominguezNo ratings yet
- Problemas ElasticidadDocument2 pagesProblemas ElasticidadJheferson Villazon CNo ratings yet
- Centros de Gravedad de Áreas y LíneasDocument8 pagesCentros de Gravedad de Áreas y LíneasMILLER JARA LA TORRENo ratings yet
- Propiedad de Áreas Planas y Lineas Centroides de Áreas CompuestasDocument29 pagesPropiedad de Áreas Planas y Lineas Centroides de Áreas CompuestasDanielGutierrezTorresNo ratings yet
- Tema 4-1Document53 pagesTema 4-1Etzel Ed MejNo ratings yet
- Caldera SsssssDocument4 pagesCaldera SsssssJonathan BriggsNo ratings yet
- Annette Moreno - Los Perros Que LadranDocument439 pagesAnnette Moreno - Los Perros Que LadranCelesteOro100% (6)
- Ecuaciones de Maxwell y los descubrimientos de HertzDocument20 pagesEcuaciones de Maxwell y los descubrimientos de HertzErwinAlfonzoNo ratings yet
- Propuesta de Rutinas de Mantenimiento para La Operación Segura en El Area de Calderas PirotubularesDocument46 pagesPropuesta de Rutinas de Mantenimiento para La Operación Segura en El Area de Calderas PirotubularesErwinAlfonzo100% (1)
- Unidad 6-12 InterruptoresDocument37 pagesUnidad 6-12 InterruptoresErwinAlfonzoNo ratings yet
- Tema 01C Equivalente Thevenin NortonDocument10 pagesTema 01C Equivalente Thevenin NortonIosmarVNo ratings yet
- 31.factores de Riesgo PF BiomecanicaDocument4 pages31.factores de Riesgo PF BiomecanicaKaren LeoniiNo ratings yet
- 1 Burner Management System (BMS) para CalderasDocument12 pages1 Burner Management System (BMS) para CalderasSilviaCuevaNo ratings yet
- Practica1 2013 2Document7 pagesPractica1 2013 2ErwinAlfonzoNo ratings yet
- Termómetro Económico y Social de AméricaDocument3 pagesTermómetro Económico y Social de AméricaErwinAlfonzoNo ratings yet
- Metodología de La InvestigaciónDocument5 pagesMetodología de La InvestigaciónÆmanuel J SilvaNo ratings yet
- Pract - N - 1 - Elect - BasDocument3 pagesPract - N - 1 - Elect - BasErwinAlfonzoNo ratings yet
- Pdvsa L-TP 1.2 Simbologia Planos Procesos y MecanicosDocument49 pagesPdvsa L-TP 1.2 Simbologia Planos Procesos y Mecanicosantonioduranp100% (2)
- La Democracia Agredida JC MonederoDocument14 pagesLa Democracia Agredida JC MonederoCarlos Ivan Gajardo FicaNo ratings yet
- TC Malamud 266Document13 pagesTC Malamud 266MendiburuFranciscoNo ratings yet
- Comparación FET Vs BJTDocument2 pagesComparación FET Vs BJTJC Xman64% (14)
- Unidad I Vectores 2014 UDocument17 pagesUnidad I Vectores 2014 UErwinAlfonzoNo ratings yet
- Matemáticas III - Funciones de Varias VariablesDocument1 pageMatemáticas III - Funciones de Varias VariablesErwinAlfonzoNo ratings yet
- Variación de La Presión en Un Fluido EstáticoDocument1 pageVariación de La Presión en Un Fluido EstáticoErwinAlfonzoNo ratings yet
- Canfield Jack - Chocolate Caliente para El AlmaDocument352 pagesCanfield Jack - Chocolate Caliente para El Almaamigoandres2001No ratings yet
- Atlas Historico de La BibliaDocument313 pagesAtlas Historico de La BibliaIsaias ToledoNo ratings yet
- C. J. Mahaney y Robin Boisvert - Como Puedo Cambiar PDFDocument52 pagesC. J. Mahaney y Robin Boisvert - Como Puedo Cambiar PDFErwinAlfonzoNo ratings yet
- Charles H. Mackintosh - El Yugo DesigualDocument56 pagesCharles H. Mackintosh - El Yugo DesigualSilvio Sandra DiazNo ratings yet
- Generadores de SeñalesDocument5 pagesGeneradores de SeñalesErwinAlfonzo100% (1)
- Analisis de Redes de TuberiaDocument77 pagesAnalisis de Redes de TuberiaErwinAlfonzoNo ratings yet
- Circuitos 1. Tema 8 (Potencia en Circuitos de Corriente Alterna)Document18 pagesCircuitos 1. Tema 8 (Potencia en Circuitos de Corriente Alterna)ErwinAlfonzoNo ratings yet
- GeometríaDocument26 pagesGeometríaRoberto Paisig CuevaNo ratings yet
- NTP 240 Las Condiciones Materiales Del Acto Didáctico (PDF, 348 Kbytes)Document11 pagesNTP 240 Las Condiciones Materiales Del Acto Didáctico (PDF, 348 Kbytes)juanper93No ratings yet
- Graficar planos, esferas, elipsoides e hiperboloidesDocument21 pagesGraficar planos, esferas, elipsoides e hiperboloidesLuis VidarteNo ratings yet
- 1-Sociología Urbana-LamyDocument15 pages1-Sociología Urbana-LamyIsabel Pedroza Diaz ㋑No ratings yet
- Cinematica 2 - Fisica 2023-IIDocument20 pagesCinematica 2 - Fisica 2023-IICristopher Renato Roncal AlvaradoNo ratings yet
- 1las Ciencias Sociales en Educación Parvularia2014Document12 pages1las Ciencias Sociales en Educación Parvularia2014Maria Cecilia CañasNo ratings yet
- Ecuaciones geométricas planasDocument3 pagesEcuaciones geométricas planasManuel Alligheri LimaNo ratings yet
- Arco Cuerda GradoDocument6 pagesArco Cuerda GradoMiguel FranciscoNo ratings yet
- Stewart Cálculo FormularioDocument10 pagesStewart Cálculo FormularioMigue VIsNo ratings yet
- Topología: Espacios métricos y topológicosDocument24 pagesTopología: Espacios métricos y topológicosDamarisHenostrozaNo ratings yet
- Topología Un Primer Curso Gustavo RubianoDocument278 pagesTopología Un Primer Curso Gustavo RubianoCarlos N. VargasNo ratings yet
- Momento de inercia laboratorioDocument4 pagesMomento de inercia laboratoriojorge luis Galindo hernandezNo ratings yet
- Problemario 1Document9 pagesProblemario 1May ReyesNo ratings yet
- Taller 1s1Document2 pagesTaller 1s1Kimberly Yessenia Cabrera EspinozaNo ratings yet
- Solución EjerciciosDocument7 pagesSolución EjerciciosDaniela Santander MezaNo ratings yet
- Trigonometría I 2Document22 pagesTrigonometría I 2Walter Giomar Vilca PalaciosNo ratings yet
- Velocidad media y rapidez en físicaDocument17 pagesVelocidad media y rapidez en físicaCeni Sotelo MárquezNo ratings yet
- Dibujo TecnicoDocument5 pagesDibujo TecnicoTamujiNo ratings yet
- Tipos de Proyección AxonométricaDocument1 pageTipos de Proyección AxonométricabennyNo ratings yet
- 2 DINAMICA Preguntas y EnunciadosDocument8 pages2 DINAMICA Preguntas y EnunciadosphrasalverbsNo ratings yet
- Trigonometria 7Document9 pagesTrigonometria 7MARCELA DANIELANo ratings yet
- Problemas de OndasDocument5 pagesProblemas de OndasByron AlejandroNo ratings yet
- Foro de Desarrollo Semanas 5: Facultad de Ingeniería, Diseño E InnovacionDocument10 pagesForo de Desarrollo Semanas 5: Facultad de Ingeniería, Diseño E InnovacionCristhianCamiloMorenoMorenoNo ratings yet
- Informe de Laboratorio, Movimiento Circular PDFDocument5 pagesInforme de Laboratorio, Movimiento Circular PDFANGEL CAMILO CONTRERAS BERNALNo ratings yet
- Espacios Prehilbertianos 2020-10-06 PDFDocument8 pagesEspacios Prehilbertianos 2020-10-06 PDFADRIANNo ratings yet
- Guia Programatica Topologia ActualizadaDocument12 pagesGuia Programatica Topologia ActualizadaSanthier Mosquera AmpudiaNo ratings yet
- Practico Número 1Document17 pagesPractico Número 1SanzNo ratings yet
- Metaforas y Rituales 2017Document20 pagesMetaforas y Rituales 2017Jose Alvaro Becerra Perez67% (3)
- Tema 1Document51 pagesTema 1Juan David AlarconNo ratings yet
- Triángulos en la arquitectura de una iglesiaDocument39 pagesTriángulos en la arquitectura de una iglesiapacodelvalleNo ratings yet