You might also like
- Introducción A La Modelación de Sistemas ExpoDocument28 pagesIntroducción A La Modelación de Sistemas ExpoMarioNo ratings yet
- Teorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesDocument4 pagesTeorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesJesus Antonio Mtz100% (2)
- Introducción a los sistemas de control y simulación en MATLABDocument3 pagesIntroducción a los sistemas de control y simulación en MATLABDIEGO FERNANDO BOTIAS RAMIREZNo ratings yet
- Problemas de Sistemas de Control de RepasoDocument7 pagesProblemas de Sistemas de Control de RepasoJose Manuel LunaNo ratings yet
- Taller 2Document2 pagesTaller 2api-3711530No ratings yet
- Tarea 41Document7 pagesTarea 41Ricardo ValverdeNo ratings yet
- Puros EjemplosDocument15 pagesPuros Ejemplosɛɗuɑʀɗѳ cѳpɑʆcuɑNo ratings yet
- Criterios de Estabilidad JURYDocument13 pagesCriterios de Estabilidad JURYDavid NietoNo ratings yet
- Compensador de fase pasivoDocument14 pagesCompensador de fase pasivoDaniel Reyes Vasquez100% (1)
- Teorema Del Muestreo y El Problema Del Enmascaramiento de SenalesDocument4 pagesTeorema Del Muestreo y El Problema Del Enmascaramiento de SenalesgerardoNo ratings yet
- ExamenDocument10 pagesExamenMario Pineda100% (1)
- Circuitos con amplificadores operacionales como controladoresDocument6 pagesCircuitos con amplificadores operacionales como controladoresfrank_montes_1No ratings yet
- Interpretacion de Concepto de Estabilidad, Error y Rapidez A Partir de La Grafica de BodeDocument4 pagesInterpretacion de Concepto de Estabilidad, Error y Rapidez A Partir de La Grafica de BodeIvan HdezNo ratings yet
- Tarea 2. Asignación de Polos EJERCICIOS 1 A 7 PDFDocument30 pagesTarea 2. Asignación de Polos EJERCICIOS 1 A 7 PDFMaria Edith Domingo GaonaNo ratings yet
- Control Moderno Ogata Ejercicios 8Document12 pagesControl Moderno Ogata Ejercicios 8DavidNo ratings yet
- Deber 3Document2 pagesDeber 3Steven Vargas100% (1)
- Capitulo 2Document90 pagesCapitulo 2Axel AlvarezNo ratings yet
- Informe Control de Temperatura para Un CautínDocument3 pagesInforme Control de Temperatura para Un CautínAlejandra OrdóñezNo ratings yet
- Actividades Control de ProcesosDocument26 pagesActividades Control de ProcesosDaniel PalaciosNo ratings yet
- Ejercicios Paso A Paso de BodeDocument28 pagesEjercicios Paso A Paso de BodeChristianJRodriguezRNo ratings yet
- Sistemas de Control AutomaticoDocument6 pagesSistemas de Control AutomaticoWendy CosmeNo ratings yet
- Reduccion de Multiples Subsistemas - Material de ApoyoDocument69 pagesReduccion de Multiples Subsistemas - Material de ApoyoJose Miguel ReyesNo ratings yet
- Teoria de Control Taller Corte 2Document25 pagesTeoria de Control Taller Corte 2Jhonatan Ferreira PachecoNo ratings yet
- Ensayo de Control 1 (Control Digital)Document5 pagesEnsayo de Control 1 (Control Digital)Paul GuillenNo ratings yet
- Ensayo"Inversor DC/AC de Onda Pura para Cargas Monofasicas A Traves de SPWM Con Microcontroladores"Document4 pagesEnsayo"Inversor DC/AC de Onda Pura para Cargas Monofasicas A Traves de SPWM Con Microcontroladores"Jaime Potes PardoNo ratings yet
- Analogias o Equivalencias Entre Sistemas Mecanicos y Eléctricos FinalDocument18 pagesAnalogias o Equivalencias Entre Sistemas Mecanicos y Eléctricos FinalPablo Andres VintimillaNo ratings yet
- CONTROL DE UN SISTEMA DE BARRA Y BOLA Mediante Variables de Estado PDFDocument22 pagesCONTROL DE UN SISTEMA DE BARRA Y BOLA Mediante Variables de Estado PDFLubrication´s RoomNo ratings yet
- Tarea#3 - Criterios de Estabilidad de RouthDocument32 pagesTarea#3 - Criterios de Estabilidad de RouthFrancisco Xavier Sevilla R.86% (22)
- Temporizador VHDLDocument9 pagesTemporizador VHDLSantiago YepesNo ratings yet
- Equipo 5 - 3.1. Métodos y Criterios para Sintonizar Controladores PID Discretos.Document15 pagesEquipo 5 - 3.1. Métodos y Criterios para Sintonizar Controladores PID Discretos.Ángeles Fernanda Hernández RomeroNo ratings yet
- Diagrama de Bloques 2Document3 pagesDiagrama de Bloques 2jguerra3dNo ratings yet
- Análisis de Función de Transferencia de Tercer OrdenDocument7 pagesAnálisis de Función de Transferencia de Tercer OrdenEduardo PastorNo ratings yet
- Compensador o Red de AdelantoDocument10 pagesCompensador o Red de AdelantoPedro JoosueNo ratings yet
- Euler LagrangeDocument9 pagesEuler LagrangeJorge Ortiz100% (1)
- Motores SincronicosDocument7 pagesMotores SincronicosJulio UrdanetaNo ratings yet
- Proyecto de diseño de eje para sistema impulsorDocument36 pagesProyecto de diseño de eje para sistema impulsorDavid FuentessNo ratings yet
- Banderas AVR MicrocontroladorDocument3 pagesBanderas AVR MicrocontroladorAlejandro Colorado100% (1)
- Parejas de Transformadas de LaplaceDocument5 pagesParejas de Transformadas de LaplaceCarlos AlvaradoNo ratings yet
- Historia Del Control de Clásico A Moderno, Concepto de Control y Diferencias Entre Control y Automatización.Document11 pagesHistoria Del Control de Clásico A Moderno, Concepto de Control y Diferencias Entre Control y Automatización.LogicTutosNo ratings yet
- Polos y CerosDocument9 pagesPolos y Cerossteeven armasNo ratings yet
- Criterios de estabilidad Routh-Hurwitz y Jury para sistemas de tiempo discretoDocument6 pagesCriterios de estabilidad Routh-Hurwitz y Jury para sistemas de tiempo discretoPeter Languila100% (1)
- Proyecto DigitalesDocument4 pagesProyecto DigitalesDanny CarvajalNo ratings yet
- Efectos de Adición de Polos y CerosDocument20 pagesEfectos de Adición de Polos y CerosDiego XavierNo ratings yet
- Orden CeroDocument6 pagesOrden CeroSamuel AruquipaNo ratings yet
- Síntesis de mecanismos de cuatro barras como generadores de funciones y movimientosDocument16 pagesSíntesis de mecanismos de cuatro barras como generadores de funciones y movimientosjuliogomez0080% (1)
- Vibraciones mecánicas ejerciciosDocument3 pagesVibraciones mecánicas ejerciciosUlises OrnelasNo ratings yet
- Taller 1 de Control AvanzadoDocument2 pagesTaller 1 de Control AvanzadoENRRIQUE PEÑANo ratings yet
- Analisis de Circuitos en El Dominio de La FrecuenciaDocument11 pagesAnalisis de Circuitos en El Dominio de La FrecuenciaSheke Carrillo100% (1)
- Generador de FuncionesDocument7 pagesGenerador de FuncionesTimy Rodríguez100% (1)
- Circuito con diodo y L: corrientes i(S1) y i(DmDocument2 pagesCircuito con diodo y L: corrientes i(S1) y i(DmDiego A CruzNo ratings yet
- Diagrama Circular de Un Motor de InducciónDocument5 pagesDiagrama Circular de Un Motor de InducciónhardNo ratings yet
- Preguntas CONTROLDocument18 pagesPreguntas CONTROLJaime Andrés Prieto TorresNo ratings yet
- Estabilidad y LGRDocument38 pagesEstabilidad y LGRLuis SaenzNo ratings yet
- Control Adaptativo Del Circuito Reductor RLCDocument8 pagesControl Adaptativo Del Circuito Reductor RLCArnold Rodriguez CarbajalNo ratings yet
- Examen Final de Sistemas de Control Digital. Rosas Montalvo JesusDocument5 pagesExamen Final de Sistemas de Control Digital. Rosas Montalvo JesusJesus Rosas MontalvoNo ratings yet
- Examenes Rae 0708Document40 pagesExamenes Rae 0708Milton Fonseca ZuritaNo ratings yet
- Análisis Temporal EjerciciosDocument2 pagesAnálisis Temporal EjerciciosOscar Miguel Castro CamposNo ratings yet
- Control Adaptativo Del Circuito Reductor RLC PDFDocument8 pagesControl Adaptativo Del Circuito Reductor RLC PDFArnold Rodriguez CarbajalNo ratings yet
- Lab 4 - 1o y 2do Orden Control PIDDocument12 pagesLab 4 - 1o y 2do Orden Control PIDCarlos Andres RojasNo ratings yet
- El Embarazo Prehispanico PDFDocument16 pagesEl Embarazo Prehispanico PDFMatthew DorseyNo ratings yet
- Encabezado IPDocument4 pagesEncabezado IPMatthew DorseyNo ratings yet
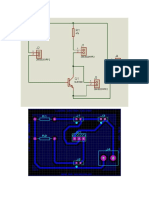
- Circuit Os PolaDocument4 pagesCircuit Os PolaMatthew DorseyNo ratings yet
- Codigos de Redundancia CìclicaDocument7 pagesCodigos de Redundancia CìclicaMatthew DorseyNo ratings yet
- Re VistaDocument10 pagesRe VistaMatthew DorseyNo ratings yet
- Algebra de Boole Circuitos LoguicosDocument27 pagesAlgebra de Boole Circuitos Loguicosdarkshypo100% (2)
- Re VistaDocument10 pagesRe VistaMatthew DorseyNo ratings yet
- Practica 1Document7 pagesPractica 1Matthew DorseyNo ratings yet
- Historia UnamDocument29 pagesHistoria UnamMatthew DorseyNo ratings yet
- Identidades TrigonometricasDocument23 pagesIdentidades TrigonometricasHector AlvaradoNo ratings yet
- HISTORIA de LA MADERA Materiales de ConstruccionDocument3 pagesHISTORIA de LA MADERA Materiales de ConstruccionCharles TineoNo ratings yet
- Estrategias de P&GDocument26 pagesEstrategias de P&Gcristal luNo ratings yet
- Entrada en Calor Educacion FisicaDocument2 pagesEntrada en Calor Educacion FisicaLucas ErbenNo ratings yet
- 4-Informe Ley de CoulombDocument4 pages4-Informe Ley de CoulombAngie OlivosNo ratings yet
- 3 El Lenguaje en La MedicinaDocument4 pages3 El Lenguaje en La MedicinaDerrardja YounesNo ratings yet
- Dirección como proceso administrativoDocument14 pagesDirección como proceso administrativoJuan Pa MartinezNo ratings yet
- 11 - Tema 9. Trabajos Con TensiónDocument112 pages11 - Tema 9. Trabajos Con TensiónEvelyn VeronNo ratings yet
- Identifica Los Hormigones de Una Obra de Construcción en Función de LaDocument6 pagesIdentifica Los Hormigones de Una Obra de Construcción en Función de LaFranco IgnacioNo ratings yet
- Corre Lola CorreDocument2 pagesCorre Lola CorreFundacion Guts Centro CristianoNo ratings yet
- Lubricante para cables de acero prolonga vida útilDocument1 pageLubricante para cables de acero prolonga vida útilRoger AndresNo ratings yet
- Causales de Improcedencia de Habeas CorpusDocument16 pagesCausales de Improcedencia de Habeas CorpusCHARBELIN FAVIOLA BAÑICO GARCIA100% (1)
- Historia y manifestaciones clínicas del mieloma múltipleDocument67 pagesHistoria y manifestaciones clínicas del mieloma múltipleJaime Salazar100% (1)
- Fonetica Conceptos (Escrito Por Mi)Document10 pagesFonetica Conceptos (Escrito Por Mi)alexroglaNo ratings yet
- Análisis para La Restauración Del Hospicio ManriqueDocument208 pagesAnálisis para La Restauración Del Hospicio ManriqueAndre RossiNo ratings yet
- Calendario Escolar 2022Document13 pagesCalendario Escolar 2022planificaciones para maestrosNo ratings yet
- Estudio Apocalipsis 1Document8 pagesEstudio Apocalipsis 1Amós Cavalcanti100% (1)
- EXPOOOOOODocument11 pagesEXPOOOOOOEyza RodriguezNo ratings yet
- Libro de OroDocument292 pagesLibro de OroRichard GutierrezNo ratings yet
- Riesgos naturalesDocument6 pagesRiesgos naturalesJoel Anthony Crisologo EspejoNo ratings yet
- Horizonte Temprano y MedioDocument26 pagesHorizonte Temprano y MedioJohann Vasquez0% (1)
- S.O Metodo Mixto MapfreDocument5 pagesS.O Metodo Mixto MapfrejelanderoNo ratings yet
- Antologia de Los Documentos Reales de La Dinastia Carlista - Melchor Ferrer (Org.), 1951Document104 pagesAntologia de Los Documentos Reales de La Dinastia Carlista - Melchor Ferrer (Org.), 1951Eduardo CruzNo ratings yet
- Balotario - Ciencias Sociales 5 SecundariaDocument3 pagesBalotario - Ciencias Sociales 5 SecundariaRonald Antezana DelgadoNo ratings yet
- El Papel Del Estado y La Calidad Del Sector PublicDocument29 pagesEl Papel Del Estado y La Calidad Del Sector PublicJavier Gutierrez AriasNo ratings yet
- Cle 4Document10 pagesCle 4Soraya Vica Sosa100% (1)
- Escuela de Política y GobiernoDocument6 pagesEscuela de Política y GobiernoMónica De la Vega CarreghaNo ratings yet
- Constructora SalblasDocument18 pagesConstructora Salblasjulio angel meza sanchezNo ratings yet
- DIA 1 SESION de APRENDIZAJE Elaboro Mi Propuesta de ActividadesDocument6 pagesDIA 1 SESION de APRENDIZAJE Elaboro Mi Propuesta de Actividadesalexander alzamoraNo ratings yet
- Como Convertir Un Documento en PDF A ExcelDocument2 pagesComo Convertir Un Documento en PDF A ExcelFranciscoNo ratings yet
- Orar Hoy, Con Los Salmos de Siempre. Tiempo Ordinario.Document287 pagesOrar Hoy, Con Los Salmos de Siempre. Tiempo Ordinario.AngelSainz100% (1)