You might also like
- Apostila GPS OutraDocument10 pagesApostila GPS OutraZé RalevaNo ratings yet
- Introdução Ao GnssDocument28 pagesIntrodução Ao GnssMario_H_MNo ratings yet
- Apresentação Posicionamento Por GNSSDocument128 pagesApresentação Posicionamento Por GNSSMirabor JúniorNo ratings yet
- Como funciona o GPSDocument30 pagesComo funciona o GPSMikael RodriguesNo ratings yet
- Apostila Gps PDFDocument23 pagesApostila Gps PDFLainiLaneNo ratings yet
- NAV-2 AULA 5 1 GPS AzvdoDocument30 pagesNAV-2 AULA 5 1 GPS AzvdoGuilherme Azevedo100% (2)
- NomeDocument3 pagesNomeGuilherme SchelbauerNo ratings yet
- Sistemas de navegação por satélite GPS e seus segmentosDocument20 pagesSistemas de navegação por satélite GPS e seus segmentosgislaineNo ratings yet
- GPSDocument3 pagesGPSGilmara Lima100% (1)
- 1.1 A Ciência Topográfica e Sua EvoluçãoDocument14 pages1.1 A Ciência Topográfica e Sua EvoluçãoAndré BeniniNo ratings yet
- GPS Funcionamento Sistema Posicionamento GlobalDocument6 pagesGPS Funcionamento Sistema Posicionamento GlobalMalate MiltonNo ratings yet
- Sistema de Posicionamento GlobalDocument19 pagesSistema de Posicionamento GlobalEduarda MirthyzNo ratings yet
- Sistema de Posicionamento Global (GPSDocument3 pagesSistema de Posicionamento Global (GPSBruno Gindri100% (1)
- Capitulo 37 - Navegacao Por Satelite - 3flDocument11 pagesCapitulo 37 - Navegacao Por Satelite - 3flEvertonNo ratings yet
- LIVROITEXTOUNDIIDocument50 pagesLIVROITEXTOUNDIILuis Gustavo G AmaralNo ratings yet
- Instituto Federal de Santa Catarina Departamento Acadêmico Da Construção Civil Apostila de GNSS Curso Técnico de AgrimensuraDocument118 pagesInstituto Federal de Santa Catarina Departamento Acadêmico Da Construção Civil Apostila de GNSS Curso Técnico de AgrimensuraFRANCISCO ANTONIO OSORIONo ratings yet
- Curso Navionics Cabanga-1Document19 pagesCurso Navionics Cabanga-1Vinícius BeltraminiNo ratings yet
- Sistemas Globais de Navegação Por Satélites PDFDocument56 pagesSistemas Globais de Navegação Por Satélites PDFAldoFreireNo ratings yet
- 1767775-03 - GNSS TopografiaDocument84 pages1767775-03 - GNSS TopografiajσтคNo ratings yet
- GEOPROCESSAMENTODocument242 pagesGEOPROCESSAMENTOAlda KoglinNo ratings yet
- FEAMIG - Metodos de Posicionamento GNSSDocument70 pagesFEAMIG - Metodos de Posicionamento GNSSRodrigo Yoshiaki Kuriyama100% (2)
- Miguens Cap 37 - Glossário GPSDocument2 pagesMiguens Cap 37 - Glossário GPSElder FrancoNo ratings yet
- Introduç o Do SistemaDocument4 pagesIntroduç o Do SistemaMalate MiltonNo ratings yet
- Guia completo sobre GPS para navegaçãoDocument18 pagesGuia completo sobre GPS para navegaçãoEduardo BastosNo ratings yet
- Slides de Aula GNSSDocument28 pagesSlides de Aula GNSSGilvan JuniorNo ratings yet
- Equipamentos TopogDocument15 pagesEquipamentos TopogHelder DiogoNo ratings yet
- GPS Center - Guia Completo sobre GPSDocument5 pagesGPS Center - Guia Completo sobre GPSLucas Giaretta AffonsoNo ratings yet
- Geoprocessamento - GPSDocument35 pagesGeoprocessamento - GPSRomildo JuniorNo ratings yet
- Sistema de Posicionamento Por SatéliteDocument43 pagesSistema de Posicionamento Por SatéliteGiovanio SilvaNo ratings yet
- Sistemas de posicionamento global: perspectiva futuraDocument5 pagesSistemas de posicionamento global: perspectiva futuraisper2No ratings yet
- GPS Funcionamento Sistema Posicionamento GlobalDocument8 pagesGPS Funcionamento Sistema Posicionamento GlobalMalate MiltonNo ratings yet
- Exercícios GeodésiaDocument13 pagesExercícios GeodésiabojjisNo ratings yet
- GLONASSDocument8 pagesGLONASSLevantamentos PlanimétricosNo ratings yet
- História dos Satélites ArtificiaisDocument114 pagesHistória dos Satélites ArtificiaisGuilherme CostaNo ratings yet
- Análise de amplificadores de potência classe D para CubeSatsDocument6 pagesAnálise de amplificadores de potência classe D para CubeSatsMarcos DanielNo ratings yet
- Tecnologias modernas na cartografiaDocument6 pagesTecnologias modernas na cartografiaShayrula AliceNo ratings yet
- 01 - Teoria Da Relatividade Restrita - GPSDocument2 pages01 - Teoria Da Relatividade Restrita - GPSDiogo ClementinoNo ratings yet
- Apostila GPSDocument81 pagesApostila GPSIvan NordNo ratings yet
- Aplicações GPS AgriculturaDocument98 pagesAplicações GPS AgriculturaEsoterikaMagia100% (1)
- Coleta de imagens de satélite e interpretaçãoDocument24 pagesColeta de imagens de satélite e interpretaçãoMarcelo SoaresNo ratings yet
- Avaliacao Da Qualidade Das Efemerides Transmitidas Dos Satelites Gps T059Document14 pagesAvaliacao Da Qualidade Das Efemerides Transmitidas Dos Satelites Gps T059Ricardo Rodrigues de AraujoNo ratings yet
- Trabalho GNSSDocument8 pagesTrabalho GNSSCustodio CossaNo ratings yet
- Orientação GPSDocument11 pagesOrientação GPSLuiz Arlindo KohlerNo ratings yet
- Metodos e Medidas de Posicionamento Geodesico Gnss Unidade IDocument22 pagesMetodos e Medidas de Posicionamento Geodesico Gnss Unidade IAndre RibeiroNo ratings yet
- Sistema Global de Posicionamento (GPSDocument63 pagesSistema Global de Posicionamento (GPSErikson MatosNo ratings yet
- O Que É GPSDocument9 pagesO Que É GPSwarlen77No ratings yet
- Principais fontes de erro GNSS e métodos de posicionamentoDocument2 pagesPrincipais fontes de erro GNSS e métodos de posicionamentoMoises TorquatoNo ratings yet
- Apostila GPS 1Document21 pagesApostila GPS 1flaviosancheszNo ratings yet
- SgpsDocument8 pagesSgpsMalate MiltonNo ratings yet
- Cansat PDFDocument9 pagesCansat PDFHubble team CANSAT 2014100% (1)
- Conceitos GPSDocument3 pagesConceitos GPSMalate MiltonNo ratings yet
- Degravação - 6 - Aquisição de Dados IIDocument9 pagesDegravação - 6 - Aquisição de Dados IIAntonio C M JrNo ratings yet
- Curso Completo sobre Redes VSATDocument19 pagesCurso Completo sobre Redes VSATteste100% (1)
- Tarefa 4.1 TextoDocument3 pagesTarefa 4.1 TextoWillian FrançaNo ratings yet
- Apresentacao GPSDocument17 pagesApresentacao GPScavaco511No ratings yet
- O Navstar GpsDocument1 pageO Navstar GpsAlex DouradoNo ratings yet
- Sistemas GNSSDocument6 pagesSistemas GNSSJoshua SmithNo ratings yet
- Apresentação Astro - UFABC - SCDDocument26 pagesApresentação Astro - UFABC - SCDGiuliana ZainotteNo ratings yet
- TERRA PLANA E OS SATÉLITES GEOESTACIONÁRIOS: ASTRONAUTICAFrom EverandTERRA PLANA E OS SATÉLITES GEOESTACIONÁRIOS: ASTRONAUTICANo ratings yet
- Fibra TreviraDocument34 pagesFibra TreviraJosé Nunes FilhoNo ratings yet
- Apostilha TcnicaDocument101 pagesApostilha TcnicaMirian Song100% (1)
- Análise sensorial de ambientes e espaçosDocument21 pagesAnálise sensorial de ambientes e espaçosJosé Nunes FilhoNo ratings yet
- ErgonomiaDocument212 pagesErgonomiaPaulomaterias67% (3)
- Mapas Conceituais em Gerenciamento de RiscosDocument15 pagesMapas Conceituais em Gerenciamento de RiscosJosé Nunes FilhoNo ratings yet
- 3611 Ergonomia Aplicada Ao DesignDocument9 pages3611 Ergonomia Aplicada Ao DesignJosé Nunes FilhoNo ratings yet
- ArtesDocument61 pagesArtesdiac.mircea3719No ratings yet
- Materiais e Proc TexteisDocument41 pagesMateriais e Proc TexteisJosé Nunes Filho100% (1)
- Introducao A Ergonomia Vidal CESERGDocument35 pagesIntroducao A Ergonomia Vidal CESERGGabriel TotiNo ratings yet
- A Presença Da ErgonomiaDocument17 pagesA Presença Da ErgonomiaJosé Nunes FilhoNo ratings yet
- 7382 31834 1 PBDocument6 pages7382 31834 1 PBJosé Nunes FilhoNo ratings yet
- Perobelli FFC UspDocument159 pagesPerobelli FFC UspJosé Nunes FilhoNo ratings yet
- A Evolução Histórica Da ErgonomiaDocument105 pagesA Evolução Histórica Da ErgonomiaMárcia BorgesNo ratings yet
- Satre e ÉticaDocument5 pagesSatre e ÉticaJosé Nunes FilhoNo ratings yet
- Envio e recebimento de pequenos valores no BrasilDocument30 pagesEnvio e recebimento de pequenos valores no BrasilVivian ZeidemannNo ratings yet
- Guia Patchwork PDFDocument49 pagesGuia Patchwork PDFJosé Nunes Filho50% (2)
- Acustica MediçãoDocument8 pagesAcustica MediçãoRobson Augusto DomingosNo ratings yet
- Máquinas de Medir Por CoordenadasDocument16 pagesMáquinas de Medir Por CoordenadasDarlon Oliveira100% (1)
- Medicaoecalculoacustica ProedDocument10 pagesMedicaoecalculoacustica ProedJosé Nunes FilhoNo ratings yet
- Gestão de RiscoDocument16 pagesGestão de RiscoJosé Nunes FilhoNo ratings yet
- Controle InternoDocument16 pagesControle InternoJosé Nunes FilhoNo ratings yet
- Design de MobiliárioDocument15 pagesDesign de MobiliárioJosé Nunes Filho100% (1)
- 7382 31834 1 PBDocument6 pages7382 31834 1 PBJosé Nunes FilhoNo ratings yet
- 2016 - Gerenciamento de Risco PDFDocument261 pages2016 - Gerenciamento de Risco PDFJosé Nunes FilhoNo ratings yet
- BNDES - Livro Verde 65 Anos Nossa História Tal Como Ela ÉDocument340 pagesBNDES - Livro Verde 65 Anos Nossa História Tal Como Ela Énelson duringNo ratings yet
- Códigos de notação nas artes: iconografia, dança, música e escritaDocument157 pagesCódigos de notação nas artes: iconografia, dança, música e escritaJosé Nunes FilhoNo ratings yet
- Divulgação Do Acervo Arqueológico de Mineração No Período Colonial em Ouro Preto e MarianaDocument20 pagesDivulgação Do Acervo Arqueológico de Mineração No Período Colonial em Ouro Preto e MarianaJosiane AlvesNo ratings yet
- Guia Patchwork PDFDocument49 pagesGuia Patchwork PDFJosé Nunes Filho50% (2)
- Sistema de MicroondasDocument13 pagesSistema de MicroondasJosé Nunes FilhoNo ratings yet
- Ouro Agua e Arqueologia MGDocument10 pagesOuro Agua e Arqueologia MGJosé Nunes FilhoNo ratings yet
- Guia completo do Aquarius 3D MAPDocument18 pagesGuia completo do Aquarius 3D MAPblowsNo ratings yet
- Herdeiros de Pedro Raimundo de Alcantara-Memorial-IncraDocument2 pagesHerdeiros de Pedro Raimundo de Alcantara-Memorial-IncraLauriano SilveiraNo ratings yet
- Requisitos para operação ILS CAT IIDocument13 pagesRequisitos para operação ILS CAT IIMarcello CabrallNo ratings yet
- RADARESARAGUAINA2022Document3 pagesRADARESARAGUAINA2022Diego SudarioNo ratings yet
- #200794-PAV I - AULA 05-Principais Requisitos de Topografia para Projeto de Estradas 3-3 PDFDocument16 pages#200794-PAV I - AULA 05-Principais Requisitos de Topografia para Projeto de Estradas 3-3 PDFArnaldoAzevedoNo ratings yet
- Grandes Navegações - História Dos Descobrimentos Portugueses e Espanhóis, ResumoDocument4 pagesGrandes Navegações - História Dos Descobrimentos Portugueses e Espanhóis, ResumoroyalNo ratings yet
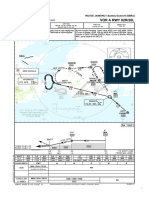
- Carta de aproximação por instrumentos para o aeroporto Santos Dumont no Rio de JaneiroDocument2 pagesCarta de aproximação por instrumentos para o aeroporto Santos Dumont no Rio de JaneiroLuiz HenriqueNo ratings yet
- FT 6 Latitude LongitudeDocument2 pagesFT 6 Latitude LongitudeJuliana MendesNo ratings yet
- Fundamentos da NavegaçãoDocument146 pagesFundamentos da NavegaçãoGeovana Lara100% (1)
- Apresentação de Legislação MarítimaDocument23 pagesApresentação de Legislação MarítimaLuan Santos Figueredo100% (1)
- Curso Engenharia Civil Geodésia Revisão ProvaDocument1 pageCurso Engenharia Civil Geodésia Revisão ProvaWellington Aguiar SouzaNo ratings yet
- Questões Geo Frente A PDFDocument231 pagesQuestões Geo Frente A PDFGiovanna BatistaNo ratings yet
- Céu Livre Aviação - Exercícios de Navegação Aérea Visual - A.M, CoLat, DLA, DLO, LAM & LOMDocument5 pagesCéu Livre Aviação - Exercícios de Navegação Aérea Visual - A.M, CoLat, DLA, DLO, LAM & LOMPedroNo ratings yet
- LC 000092 20200605Document17 pagesLC 000092 20200605Gustavo HofstatterNo ratings yet
- Lei 11.259 2018 - Divisão Intermunicipal Do Estado Da ParaíbaDocument655 pagesLei 11.259 2018 - Divisão Intermunicipal Do Estado Da ParaíbaJoão Luís G.A.FNo ratings yet
- Curso Localização GeográficaDocument12 pagesCurso Localização GeográficaBruno Santos100% (1)
- Navegação, Lembretes Prova Arrais-AmadorDocument73 pagesNavegação, Lembretes Prova Arrais-AmadorRafael NogueiraNo ratings yet
- O Alargamento Do Conhecimento Do MundoDocument4 pagesO Alargamento Do Conhecimento Do Mundoisg080% (1)
- Apostila de Geografia - Aula 1Document21 pagesApostila de Geografia - Aula 1Isadora Cabral da SilvaNo ratings yet
- Guia do usuário do GPS Aquarius 3D MAPDocument63 pagesGuia do usuário do GPS Aquarius 3D MAPChristian White50% (2)
- Navegação - A Ciência e A Arte - Livro 1Document483 pagesNavegação - A Ciência e A Arte - Livro 1Christiano97% (35)
- Croquis Lote Banco 0Document1 pageCroquis Lote Banco 0Antonio André100% (1)
- Atividades - GeografiaDocument14 pagesAtividades - Geografiaprofessora dlaaNo ratings yet
- Navegação - CMSDocument3 pagesNavegação - CMSMillena GomesNo ratings yet
- Introdução à CartografiaDocument44 pagesIntrodução à CartografiaLuiza EscolaNo ratings yet
- ATIVIDADE GEOGRAFIA - ROSA DOS VENTOS - TUDO SALA DE AULA(1)Document2 pagesATIVIDADE GEOGRAFIA - ROSA DOS VENTOS - TUDO SALA DE AULA(1)Helen Neves Ribeiro CostaNo ratings yet
- Orientação com bússola e declinação magnéticaDocument12 pagesOrientação com bússola e declinação magnéticaMarina Bordieri de BarrosNo ratings yet
- Avisos Náuticos BrasilDocument161 pagesAvisos Náuticos BrasilEduardo BarbozaNo ratings yet
- Exercícios Geografia 6o anoDocument12 pagesExercícios Geografia 6o anoTalita EliodoroNo ratings yet
- A Prática Da Navegação - Vol.1 - Comte. Carlos R. Caminha Gomes - EdDocument671 pagesA Prática Da Navegação - Vol.1 - Comte. Carlos R. Caminha Gomes - EdBrenno Lyncolm AmorimNo ratings yet