You might also like
- Control Basics Chapter - 1Document53 pagesControl Basics Chapter - 1Ahmed SeliemNo ratings yet
- Computer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmDocument43 pagesComputer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmPandimadevi GanesanNo ratings yet
- Question Bank - IDocument1 pageQuestion Bank - IPandimadevi GanesanNo ratings yet
- Thermistor Project1 PDFDocument5 pagesThermistor Project1 PDFYan Mg MgNo ratings yet
- Digital Pid Controller - 72S173Document15 pagesDigital Pid Controller - 72S173Pandimadevi GanesanNo ratings yet
- Unit III AnswersDocument9 pagesUnit III AnswersPandimadevi GanesanNo ratings yet
- Hough TransformDocument19 pagesHough TransformSmitha VasNo ratings yet
- Qdoc - Tips Temperature Controlled Fan ReportDocument26 pagesQdoc - Tips Temperature Controlled Fan ReportPandimadevi GanesanNo ratings yet
- Fundamentals of Image Processing: Lecture #7 Edge DetectionDocument65 pagesFundamentals of Image Processing: Lecture #7 Edge DetectionPandimadevi GanesanNo ratings yet
- Computer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmDocument43 pagesComputer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmPandimadevi GanesanNo ratings yet
- Question Bank - IDocument1 pageQuestion Bank - IPandimadevi GanesanNo ratings yet
- GiraafeeDocument1 pageGiraafeePandimadevi GanesanNo ratings yet
- 13221037,14121022,14121079,14121074 EeeDocument136 pages13221037,14121022,14121079,14121074 EeeAMISHNo ratings yet
- Effects of Fertilizers, Manure and Polythene on Seed GerminationDocument20 pagesEffects of Fertilizers, Manure and Polythene on Seed GerminationPandimadevi GanesanNo ratings yet
- Direct Digital Control of An Air-HandlerDocument17 pagesDirect Digital Control of An Air-HandlerPandimadevi GanesanNo ratings yet
- Instructions For Installing MATLAB R2014Document1 pageInstructions For Installing MATLAB R2014Pandimadevi GanesanNo ratings yet
- Chap 13-Plant Nutrition LecDocument44 pagesChap 13-Plant Nutrition LecChaiyryl CalagoNo ratings yet
- Aq 378 eDocument368 pagesAq 378 ePandimadevi GanesanNo ratings yet
- Poverty ProjectDocument8 pagesPoverty ProjectPandimadevi GanesanNo ratings yet
- Wireless ChargerDocument14 pagesWireless ChargerPandimadevi GanesanNo ratings yet
- Transmitter Medium ReceiverDocument12 pagesTransmitter Medium ReceiverPandimadevi GanesanNo ratings yet
- Aq 378 eDocument368 pagesAq 378 ePandimadevi GanesanNo ratings yet
- Wireless Energy Transfer: Yue Ma October 22, 2010Document3 pagesWireless Energy Transfer: Yue Ma October 22, 2010Pandimadevi GanesanNo ratings yet
- Realtime Pacer LicenseDocument1 pageRealtime Pacer LicensesunilkumareceNo ratings yet
- Wirelesspowertransferreport2 PDFDocument26 pagesWirelesspowertransferreport2 PDFsuman vvabNo ratings yet
- Applications in The Industrial EnvironmentDocument8 pagesApplications in The Industrial EnvironmentPandimadevi GanesanNo ratings yet
- Smoke Detection Using MQ-2 Gas Sensor - Arduino Project HubDocument37 pagesSmoke Detection Using MQ-2 Gas Sensor - Arduino Project HubPandimadevi GanesanNo ratings yet
- Chapter 4 Controllers ExplainedDocument36 pagesChapter 4 Controllers ExplainedPandimadevi GanesanNo ratings yet
- N3110 3Document44 pagesN3110 3sqkidNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- RECAT Approved List Sent To StudentsDocument4 pagesRECAT Approved List Sent To Studentsdhanya sree nathaniNo ratings yet
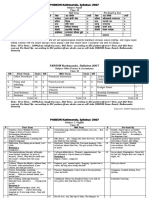
- PABSON Kathmandu Syllabus 2067Document14 pagesPABSON Kathmandu Syllabus 2067Tejendra Pachhai0% (1)
- Field Models of Induction Heating For Industrial ApplicationsDocument5 pagesField Models of Induction Heating For Industrial ApplicationsLuckyNo ratings yet
- Proposed Date Sheet Dec, 2019 From 2016 Batch PDFDocument72 pagesProposed Date Sheet Dec, 2019 From 2016 Batch PDFmorning starNo ratings yet
- Capital MarketsDocument10 pagesCapital MarketsAadityaMahanteNo ratings yet
- Term 2 Year 10 Add MathsDocument3 pagesTerm 2 Year 10 Add MathsAONo ratings yet
- Template RPH Form 4Document1 pageTemplate RPH Form 4fienaNo ratings yet
- List of The Best Mathematics BooksDocument10 pagesList of The Best Mathematics BooksFernando J. Correa Delgado100% (3)
- Cambridge International AS & A Level: Further Mathematics 9231/22Document16 pagesCambridge International AS & A Level: Further Mathematics 9231/22M IdkNo ratings yet
- 1.3 Gauss Elimination MethodDocument6 pages1.3 Gauss Elimination Methodshravan mandalNo ratings yet
- ZaraDocument35 pagesZaraRaymytechNo ratings yet
- Spherical Trigonometry: Appendix ADocument42 pagesSpherical Trigonometry: Appendix Aasdffh kjhlbnNo ratings yet
- Laplace Transform for Physical Pendulum MotionDocument4 pagesLaplace Transform for Physical Pendulum MotionAprilia Putri LaurinaNo ratings yet
- Vector Calculus, Linear Algebra, and Differential Forms: A Unified ApproachDocument4 pagesVector Calculus, Linear Algebra, and Differential Forms: A Unified ApproachDhrubajyoti DasNo ratings yet
- Mws Gen Inp TXT SplineDocument12 pagesMws Gen Inp TXT SplineApuu Na Juak EhNo ratings yet
- Singapore Competition Math Training HandbookDocument132 pagesSingapore Competition Math Training HandbookRohmatullah SuniNo ratings yet
- Matematik Modul Topikal K2 SPM 2020Document484 pagesMatematik Modul Topikal K2 SPM 2020mus mustafa67% (3)
- m1 l1.2 - Linear SystemsDocument32 pagesm1 l1.2 - Linear SystemsHera ReinaNo ratings yet
- MCM NKANA SECONDARY SCHOOL GRADE 10 END OF TERM 2 EXAMDocument2 pagesMCM NKANA SECONDARY SCHOOL GRADE 10 END OF TERM 2 EXAMTahpehs Phiri50% (2)
- Pair of Linear Equations in Two VariablesDocument6 pagesPair of Linear Equations in Two VariablesEnglish DemoNo ratings yet
- Mathalino: Design of Steel Reinforcement of Concrete Beams by WSD MethodDocument3 pagesMathalino: Design of Steel Reinforcement of Concrete Beams by WSD MethodDanielle Kiara ZarzosoNo ratings yet
- 2020 Assessment 1 - Alternate Task Ext1 (William's Work) PDFDocument7 pages2020 Assessment 1 - Alternate Task Ext1 (William's Work) PDF黑剑No ratings yet
- Higher Unit 06c Check in Test Quadratic Cubic and Other GraphsDocument7 pagesHigher Unit 06c Check in Test Quadratic Cubic and Other Graphshannah hussainNo ratings yet
- Diffrential EquationsDocument2 pagesDiffrential EquationsHelloNo ratings yet
- Eur J Phys 31 2010Document16 pagesEur J Phys 31 2010Ștefan RăzvanNo ratings yet
- CE 636 Assignment 2Document2 pagesCE 636 Assignment 2Rodrigo RomeroNo ratings yet
- Mathematica SlideDocument16 pagesMathematica Slidesaw roseNo ratings yet
- Nonlinear Functional Analysis - SchwartzDocument242 pagesNonlinear Functional Analysis - SchwartzClayton RibeiroNo ratings yet
- 9709 s14 QP 32Document4 pages9709 s14 QP 32malyksNo ratings yet