You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Reference (Woodside - Standards)Document23 pagesReference (Woodside - Standards)shankarmech04@gmail.com100% (1)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Design of Heat Exchanger Part-7Document1 pageDesign of Heat Exchanger Part-7Dana GuerreroNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Proposal For Alliance For KSA Audience For SABB and Alawwal BankDocument2 pagesProposal For Alliance For KSA Audience For SABB and Alawwal BankDana GuerreroNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Warning:: Date Reference NumberDocument44 pagesWarning:: Date Reference NumberA.Subin DasNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Design of Heat Exchanger Part-8Document1 pageDesign of Heat Exchanger Part-8Dana GuerreroNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Oliver 61Document5 pagesOliver 61AdityaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- BM Europe Expansion Joints Technical CalculationDocument9 pagesBM Europe Expansion Joints Technical CalculationsahirprojectsNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- SupportsDocument6 pagesSupportsDana GuerreroNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Error Control CodingDocument8 pagesError Control Codingnannurah100% (1)
- Design of Heat Exchanger Part-6Document1 pageDesign of Heat Exchanger Part-6Dana GuerreroNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- OO - IDCbookextract - Rev5 DAFTAR ISI BAGUS UTK GAMBARAN PIPELINE PDFDocument26 pagesOO - IDCbookextract - Rev5 DAFTAR ISI BAGUS UTK GAMBARAN PIPELINE PDFpradewoNo ratings yet
- Design of Heat Exchanger Part-9Document1 pageDesign of Heat Exchanger Part-9Dana GuerreroNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Cat CSVDocument36 pagesCat CSVaqhammamNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Exp JointDocument62 pagesExp JointDana GuerreroNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Design of Heat Exchanger Part-6Document1 pageDesign of Heat Exchanger Part-6Dana GuerreroNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Modeling air coolers with flexible piping and mechanical linkagesDocument1 pageModeling air coolers with flexible piping and mechanical linkagesroyalcomNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- New Microsoft Word DocumentDocument8 pagesNew Microsoft Word DocumentDana GuerreroNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Design of Heat Exchanger Part-6Document2 pagesDesign of Heat Exchanger Part-6Dana GuerreroNo ratings yet
- DNV RP D101 October 2008Document42 pagesDNV RP D101 October 2008aop10468100% (1)
- Buired Pipeline StressDocument9 pagesBuired Pipeline StressDana GuerreroNo ratings yet
- Design of Heat Exchanger Part-10Document1 pageDesign of Heat Exchanger Part-10Dana GuerreroNo ratings yet
- Design of Heat Exchanger Part-10Document2 pagesDesign of Heat Exchanger Part-10Dana GuerreroNo ratings yet
- CHART Cold Box Installation Operation and Maintenance PDFDocument16 pagesCHART Cold Box Installation Operation and Maintenance PDFDana GuerreroNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- DNV RP D101 October 2008Document42 pagesDNV RP D101 October 2008aop10468100% (1)
- Anchor Support - Thermal ExpansionDocument99 pagesAnchor Support - Thermal ExpansionKCFUNG100% (1)
- CAESAR System ModellingDocument2 pagesCAESAR System ModellingDana GuerreroNo ratings yet
- Tema Designations of Heat ExchangersDocument6 pagesTema Designations of Heat ExchangersNikunj KNo ratings yet
- Fpso Presentation Technipfmc ShiDocument25 pagesFpso Presentation Technipfmc ShiBharuk Mech100% (2)
- Nadia Todays JobsDocument1 pageNadia Todays JobsDana GuerreroNo ratings yet
- 1607pras PDFDocument4 pages1607pras PDFDana GuerreroNo ratings yet
- 1 Percent For Grouped DataDocument9 pages1 Percent For Grouped DataRyan Cris FranciscoNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
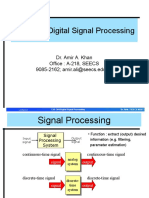
- CSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkDocument22 pagesCSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkAlamgir Ahmad KhattakNo ratings yet
- Fiziks: Jnu-Entrance Examination-2009 M.Sc. Physics Maximum Marks: 90 Instructions For CandidatesDocument8 pagesFiziks: Jnu-Entrance Examination-2009 M.Sc. Physics Maximum Marks: 90 Instructions For CandidatessairajdreamNo ratings yet
- DOMENE WHO - QoLDocument21 pagesDOMENE WHO - QoLSahim KahrimanovicNo ratings yet
- Measures of Central Tendency and Position (Ungrouped Data) : Lesson 3Document19 pagesMeasures of Central Tendency and Position (Ungrouped Data) : Lesson 3Gemver Baula BalbasNo ratings yet
- Aerodynamics MCQs on Low Speed AerodynamicsDocument4 pagesAerodynamics MCQs on Low Speed AerodynamicsHarish MathiazhahanNo ratings yet
- Probability and Statistics Course SyllabusDocument4 pagesProbability and Statistics Course SyllabusTaufiqur AnikNo ratings yet
- Assessment in Learning 1 LoriMarDocument45 pagesAssessment in Learning 1 LoriMarSalonga Christalyn Mae F.100% (1)
- Bitwise Operator StructuresDocument6 pagesBitwise Operator StructuresrajuhdNo ratings yet
- Optimal f ratio for inverter chainDocument6 pagesOptimal f ratio for inverter chainVIKAS RAONo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Calculate area under curveDocument6 pagesCalculate area under curvePunit Singh SahniNo ratings yet
- 1 s2.0 S1110016822005646 MainDocument14 pages1 s2.0 S1110016822005646 MainEss ZeeNo ratings yet
- A RANS-based Analysis Ool For Ducted Propeller Systems in Open Water ConditionDocument23 pagesA RANS-based Analysis Ool For Ducted Propeller Systems in Open Water ConditionLeonardo Duarte MilfontNo ratings yet
- ECON 233-Introduction To Game Theory - Husnain Fateh AhmadDocument7 pagesECON 233-Introduction To Game Theory - Husnain Fateh AhmadAdeel ShaikhNo ratings yet
- Reed BC Quantum Mechanics An Enhanced PrimerDocument407 pagesReed BC Quantum Mechanics An Enhanced PrimerStrahinja DonicNo ratings yet
- HAL An Approach Attack To Goldbach ConjectureDocument23 pagesHAL An Approach Attack To Goldbach ConjectureEMMANUEL AUDIGÉNo ratings yet
- 1 Number Bases Student Module 1Document3 pages1 Number Bases Student Module 1X UnknownNo ratings yet
- Correlation and RegressionDocument9 pagesCorrelation and RegressionMd Ibrahim MollaNo ratings yet
- Activity 2.1 MMWDocument1 pageActivity 2.1 MMWJ Saint BadeNo ratings yet
- Mastering Sequences & SeriesDocument2 pagesMastering Sequences & SeriesCristina CotraNo ratings yet
- Instructional Module: Republic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayaDocument14 pagesInstructional Module: Republic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayaMary Jane BugarinNo ratings yet
- 01-04-2021 SR - Super60 & All Jee-Main GTM-16 Key & Sol'sDocument12 pages01-04-2021 SR - Super60 & All Jee-Main GTM-16 Key & Sol'sGowri ShankarNo ratings yet
- Gpelab A Matlab Toolbox For Computing Stationary Solutions and Dynamics of Gross-Pitaevskii Equations (Gpe)Document122 pagesGpelab A Matlab Toolbox For Computing Stationary Solutions and Dynamics of Gross-Pitaevskii Equations (Gpe)Pol MestresNo ratings yet
- A Comparison of Subspace Methods For Sylvester Equations: Mathematics InstituteDocument9 pagesA Comparison of Subspace Methods For Sylvester Equations: Mathematics InstituteDurga SivakumarNo ratings yet
- On The Static Solutions in Gravity With Massive Scalar Field in Three DimensionsDocument11 pagesOn The Static Solutions in Gravity With Massive Scalar Field in Three DimensionsMojeime Igor NowakNo ratings yet
- Lecture 22Document6 pagesLecture 22Rainesius DohlingNo ratings yet
- Sachin S. Pawar: Career ObjectivesDocument3 pagesSachin S. Pawar: Career ObjectivesSachin PawarNo ratings yet
- CV Dr Mohammad ShahzadDocument5 pagesCV Dr Mohammad ShahzadTarique WaliNo ratings yet
- Principles of Robot Autonomy I: Robotic Sensors and Introduction To Computer VisionDocument38 pagesPrinciples of Robot Autonomy I: Robotic Sensors and Introduction To Computer VisionratjerryNo ratings yet
- BoualiS 3dDocument8 pagesBoualiS 3dGuilherme Francisco ComassettoNo ratings yet
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityFrom EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityRating: 4.5 out of 5 stars4.5/5 (115)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationFrom EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationRating: 4.5 out of 5 stars4.5/5 (2)
- Dark Aeon: Transhumanism and the War Against HumanityFrom EverandDark Aeon: Transhumanism and the War Against HumanityRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkFrom EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkRating: 5 out of 5 stars5/5 (1)