You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Atec Manual ElectronicDocument73 pagesAtec Manual ElectronicMinaSaeed67% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Electricity Magnetism and ElectromagnetismDocument64 pagesElectricity Magnetism and ElectromagnetismFe DNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Geodesic MathDocument21 pagesGeodesic Matherbercam0% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- CSP Exam Equation Fully Explained DEMODocument33 pagesCSP Exam Equation Fully Explained DEMOFff63% (8)
- The Mechanics of The Atom - by Max BornDocument346 pagesThe Mechanics of The Atom - by Max Bornahsbon100% (2)
- Problems in Soil Mechanics and Foundation EngineeringDocument172 pagesProblems in Soil Mechanics and Foundation EngineeringCharilyn Echeverre100% (16)
- Advance VibrationDocument263 pagesAdvance VibrationSurya Pratap SinghNo ratings yet
- Wolfson Eup3 Ch09 Test BankDocument15 pagesWolfson Eup3 Ch09 Test BankifghelpdeskNo ratings yet
- Wellbore Stability AnalysisDocument148 pagesWellbore Stability Analysishagh1234No ratings yet
- Impact of A JetDocument14 pagesImpact of A JetKamarul Yusri100% (4)
- CHEMICAL ENGINEERING LICENSURE EXAM REVIEWDocument3 pagesCHEMICAL ENGINEERING LICENSURE EXAM REVIEWJayson Ordinaria100% (1)
- Vector Calculus at A GlanceDocument24 pagesVector Calculus at A Glancedayangku zarithNo ratings yet
- 4.5 VectorFields PDFDocument32 pages4.5 VectorFields PDFdayangku zarithNo ratings yet
- Vector Calculus at A GlanceDocument24 pagesVector Calculus at A Glancedayangku zarithNo ratings yet
- Vector Calculus at A GlanceDocument24 pagesVector Calculus at A Glancedayangku zarithNo ratings yet
- CH 34 - Total SolutionsDocument24 pagesCH 34 - Total SolutionsLemonn LemonnNo ratings yet
- Practice Exam QuestionsDocument5 pagesPractice Exam QuestionsEamon BarkhordarianNo ratings yet
- Spredox D 364 For Solvent Based InkjetDocument9 pagesSpredox D 364 For Solvent Based InkjetPravin TandelNo ratings yet
- Chemistry Paper 8 Module 34: Excited States and Emission ProcessesDocument9 pagesChemistry Paper 8 Module 34: Excited States and Emission ProcessesSriNo ratings yet
- Allen DLP Major-3eng QDocument24 pagesAllen DLP Major-3eng Qrk467111No ratings yet
- Millman Halkias - Integrated ElectronicsDocument14 pagesMillman Halkias - Integrated ElectronicsSushruti Richaa KashyapNo ratings yet
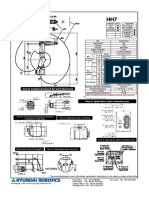
- Hh7 CatalogDocument1 pageHh7 Catalogjitender kumarNo ratings yet
- WWW - Manaresults.Co - In: (Common To ME, AME, MSNT)Document2 pagesWWW - Manaresults.Co - In: (Common To ME, AME, MSNT)Asheesh KumarNo ratings yet
- Relativistic Effects Structural Chemistry: &Document32 pagesRelativistic Effects Structural Chemistry: &champ delacruzNo ratings yet
- Class XII Physics Exam Revision SheetDocument4 pagesClass XII Physics Exam Revision SheetYogesh ChauhanNo ratings yet
- Rate of Change and Approximate ChangeDocument9 pagesRate of Change and Approximate ChangeThomas AlfieNo ratings yet
- Energy Transfer in Turbomachines ExplainedDocument4 pagesEnergy Transfer in Turbomachines Explainedsachintyagi1No ratings yet
- 2015 2016AP Chemistry Summer AssignmentDocument7 pages2015 2016AP Chemistry Summer AssignmentBraden FarrellNo ratings yet
- ElectricityDocument25 pagesElectricityWeb BooksNo ratings yet
- Unbalanced Magnetic Pull Forces in Cage Induction Motors with AsymmetryDocument5 pagesUnbalanced Magnetic Pull Forces in Cage Induction Motors with AsymmetryRohan ChandrashekarNo ratings yet
- Trajectories and Radius, Velocity, AccelerationDocument12 pagesTrajectories and Radius, Velocity, AccelerationEpic WinNo ratings yet
- CH04 - Heat Exchanger - AmanDocument104 pagesCH04 - Heat Exchanger - AmanNabilah MustafaNo ratings yet
- Vacuum, General Relativity: PHY100 The Nature of The Physical WorldDocument21 pagesVacuum, General Relativity: PHY100 The Nature of The Physical WorldJacecosmozNo ratings yet
- 55-1-1 Physics Marking Scheme 2020Document18 pages55-1-1 Physics Marking Scheme 2020jyotibhalaNo ratings yet