You might also like
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Calculating Kinds of IntegralsDocument8 pagesCalculating Kinds of IntegralsBún CáNo ratings yet
- Linear RegressionDocument34 pagesLinear RegressionRaksa KunNo ratings yet
- Inverse FunctionsDocument14 pagesInverse FunctionsFano ThomasNo ratings yet
- Lecture 2Document22 pagesLecture 2Renad SaafanNo ratings yet
- Chapter 2 Mat455Document36 pagesChapter 2 Mat455Ajaq 98No ratings yet
- Today:: + Cos + Sin ,:, Arg Arg + Arg +Document20 pagesToday:: + Cos + Sin ,:, Arg Arg + Arg +IbrahimNo ratings yet
- Gradient Method OptimizationDocument11 pagesGradient Method OptimizationGafeer FableNo ratings yet
- Unit 2 CalculusDocument13 pagesUnit 2 CalculusWalwal WalwalNo ratings yet
- Lecture Note 5Document9 pagesLecture Note 5Workineh Asmare KassieNo ratings yet
- 5 FEA CADDocument12 pages5 FEA CADMohamed AbdelazizNo ratings yet
- Vector Calculus I 2Document52 pagesVector Calculus I 2Ayush SawNo ratings yet
- Formulae, Tables and Guidance Notes For Examination PDFDocument31 pagesFormulae, Tables and Guidance Notes For Examination PDF123No ratings yet
- 04-Binary ClassificationDocument19 pages04-Binary ClassificationDebashish DekaNo ratings yet
- Chapter 1Document15 pagesChapter 1Tariq AlharbiNo ratings yet
- Complex Variables: Geometric RepresentationDocument38 pagesComplex Variables: Geometric Representationbala a guy with a gangNo ratings yet
- Lecture 29-Revision of Unit5 and MCQ PracticeDocument28 pagesLecture 29-Revision of Unit5 and MCQ PracticeAerra ManirajNo ratings yet
- Notes 2.1 Day 1 Average and Instantaneous Rate of ChangeDocument6 pagesNotes 2.1 Day 1 Average and Instantaneous Rate of ChangeAlexandra BragaNo ratings yet
- ICTT Unit IV Complex Variables NotesDocument83 pagesICTT Unit IV Complex Variables NotesChoose Movie ClipsNo ratings yet
- Lecture 01 - Review of FundamentalsDocument6 pagesLecture 01 - Review of FundamentalsCaden LeeNo ratings yet
- Backward Forward PropogationDocument19 pagesBackward Forward PropogationConrad WaluddeNo ratings yet
- ACTMathFormulaSheet2Document2 pagesACTMathFormulaSheet2Stu PotNo ratings yet
- Basic Notation Latin CharactersDocument1 pageBasic Notation Latin CharactersMuhammad KusairiNo ratings yet
- Bacal LessonDocument16 pagesBacal LessonKysha PampiloNo ratings yet
- RegrassionDocument22 pagesRegrassionrslunaNo ratings yet
- Differentiation TutorialDocument16 pagesDifferentiation TutorialNathan LongNo ratings yet
- Chapter Two Part 1Document13 pagesChapter Two Part 1chalatesfaye46No ratings yet
- Bài Tập Ước Lượng C12346Document55 pagesBài Tập Ước Lượng C12346Nguyễn Viết DươngNo ratings yet
- BeamDocument18 pagesBeamfantahun ayalnehNo ratings yet
- Complex Analytic FunctionsDocument60 pagesComplex Analytic FunctionsKiran YadavNo ratings yet
- Lesson 1.a - 1.c - Integration Concepts & FormulasDocument5 pagesLesson 1.a - 1.c - Integration Concepts & FormulasAishlly Crystal OrtizNo ratings yet
- 课件1Document17 pages课件1Alex WangNo ratings yet
- EE 407 Numerical Methods Chapter 1Document15 pagesEE 407 Numerical Methods Chapter 1ُIBRAHEEM ALHARBINo ratings yet
- AI Explanation Basic 2Document35 pagesAI Explanation Basic 2Jerry BenitezNo ratings yet
- Kinematics of Particles Plane Curvilinear MotionDocument16 pagesKinematics of Particles Plane Curvilinear Motionson gokuNo ratings yet
- Geg 311 Vector FunctionsDocument19 pagesGeg 311 Vector Functionsakinyemi.favour.isaacNo ratings yet
- Machine Learning Fundamentals in 40 CharactersDocument94 pagesMachine Learning Fundamentals in 40 CharactersKamal BoulefraNo ratings yet
- Exponential FunctionDocument4 pagesExponential FunctionErica Mamauag100% (1)
- Physics 1301 Equation SheetDocument2 pagesPhysics 1301 Equation Sheeth.krijestoracNo ratings yet
- Ch8 (3) Numerical IntegrationDocument19 pagesCh8 (3) Numerical Integrationআসিফ রেজাNo ratings yet
- 1301-formula-sheetDocument2 pages1301-formula-sheetdivitimaniteja999786No ratings yet
- Module 1 - Differential CalculusDocument7 pagesModule 1 - Differential CalculusTimoteo Ponce Mejorada Jr.100% (2)
- 3.3 Conservative Vector FieldDocument5 pages3.3 Conservative Vector FieldSyafiyatulMunawarahNo ratings yet
- MODULE 6 - Linear Equations of The First OrderDocument7 pagesMODULE 6 - Linear Equations of The First OrderKNARF FRANKNo ratings yet
- CONSERVATIVE VECTOR FIELD DETERMINATIONDocument17 pagesCONSERVATIVE VECTOR FIELD DETERMINATIONdurga03No ratings yet
- Lab 04Document3 pagesLab 04Muhammad HusnainNo ratings yet
- Vector Calculus Add OnDocument86 pagesVector Calculus Add Onabiramijeyaseelan05No ratings yet
- Multiple Linear RegressionDocument17 pagesMultiple Linear Regressionismael kenedyNo ratings yet
- Calculus CHAPTER 1Document11 pagesCalculus CHAPTER 1Kiet HoangNo ratings yet
- Discover: What Is A Tangent?Document12 pagesDiscover: What Is A Tangent?suzannevillasis19No ratings yet
- Lnote - IIIDocument7 pagesLnote - IIIUpdirahman MohamoudNo ratings yet
- CH3 Vector CalculusDocument39 pagesCH3 Vector CalculusAfie Fahry AdzmiNo ratings yet
- AssignmentDocument3 pagesAssignmentSilvia Rahmi EkasariNo ratings yet
- Lec1 2 3math PDocument31 pagesLec1 2 3math Pyalaaeldin622No ratings yet
- Stat2 2023 Syllabus B v1.0 Weeks 5-6-7Document41 pagesStat2 2023 Syllabus B v1.0 Weeks 5-6-7Andrei PopaNo ratings yet
- E7 2021 FinalReviewDocument85 pagesE7 2021 FinalReviewkongNo ratings yet
- Mech 430 Final Formula Sheet UpdatedDocument12 pagesMech 430 Final Formula Sheet UpdatedSalman MasriNo ratings yet
- Appendix Robust RegressionDocument17 pagesAppendix Robust RegressionPRASHANTH BHASKARANNo ratings yet
- Tune ParetoDocument39 pagesTune ParetoMarius_2010No ratings yet
- Metric LearningDocument41 pagesMetric LearningMarius_2010No ratings yet
- New Algorithms for Efficient High-Dimensional Nonparametric ClassificationDocument24 pagesNew Algorithms for Efficient High-Dimensional Nonparametric ClassificationMarius_2010No ratings yet
- Boosted TreeDocument41 pagesBoosted TreeMic SchNo ratings yet
- Survery of Nearest NeighborDocument4 pagesSurvery of Nearest NeighborGanesh ChandrasekaranNo ratings yet
- KD Skinny FatDocument8 pagesKD Skinny FatMarius_2010No ratings yet
- Chap10 Anomaly DetectionDocument13 pagesChap10 Anomaly DetectionPhạm Đình SứngNo ratings yet
- Balanced k-d Tree in O(kn log n) TimeDocument19 pagesBalanced k-d Tree in O(kn log n) TimeMarius_2010No ratings yet
- Rice Price PredictionDocument13 pagesRice Price PredictionMarius_2010No ratings yet
- Xgboost 150831021017 Lva1 App6891Document128 pagesXgboost 150831021017 Lva1 App6891Pushp ToshniwalNo ratings yet
- Applying KNN To Stock Price PredictionDocument17 pagesApplying KNN To Stock Price PredictionMarius_2010No ratings yet
- WNvanWieringen HDDA Lecture4 RidgeRegression 20162017Document88 pagesWNvanWieringen HDDA Lecture4 RidgeRegression 20162017Marius_2010No ratings yet
- IntroMAs Advanced PDFDocument46 pagesIntroMAs Advanced PDFMarius_2010No ratings yet
- R Mals ChainsDocument9 pagesR Mals ChainsMarius_2010No ratings yet
- Curs 7Document46 pagesCurs 7Marius_2010No ratings yet
- A Comparison Between Memetic Algorithm and Genetic Algorithm For The Cryptanalysis of Simplified Data Encryption Standard AlgorithmDocument9 pagesA Comparison Between Memetic Algorithm and Genetic Algorithm For The Cryptanalysis of Simplified Data Encryption Standard AlgorithmAIRCC - IJNSANo ratings yet
- PE - Tutorial-Avaliar Mashinelearn PDFDocument112 pagesPE - Tutorial-Avaliar Mashinelearn PDFyvpauloNo ratings yet
- Curs10 SiteDocument26 pagesCurs10 SiteMarius_2010No ratings yet
- Course Content: Data Mining & Knowledge DiscoveryDocument15 pagesCourse Content: Data Mining & Knowledge DiscoveryMarius_2010No ratings yet
- Curs 7Document46 pagesCurs 7Marius_2010No ratings yet
- Hierarchical Clustering PDFDocument11 pagesHierarchical Clustering PDFMarius_2010No ratings yet
- Metric LearningDocument41 pagesMetric LearningMarius_2010No ratings yet
- It's Not What You Draw, It's What You Not Draw: Drawing Paths With HolesDocument6 pagesIt's Not What You Draw, It's What You Not Draw: Drawing Paths With HolesMarius_2010No ratings yet
- Dtree18 PDFDocument51 pagesDtree18 PDFMarius_2010No ratings yet
- Chap9 Advanced Cluster AnalysisDocument19 pagesChap9 Advanced Cluster AnalysisHareesha N GNo ratings yet
- Lecture Notes For Chapter 1 Introduction To Data Mining: by Tan, Steinbach, KumarDocument31 pagesLecture Notes For Chapter 1 Introduction To Data Mining: by Tan, Steinbach, KumarSonali PanigrahiNo ratings yet
- Ogata Control PDFDocument2 pagesOgata Control PDFAdam0% (3)
- 96320Document58 pages96320ShreyaNo ratings yet
- DFA vs NDFA: Key Differences and ApplicationsDocument16 pagesDFA vs NDFA: Key Differences and ApplicationspaulNo ratings yet
- Chapter 06 - Turing MachineDocument18 pagesChapter 06 - Turing MachineHafiz AbduNo ratings yet
- Wolfram - A New Kind of ScienceDocument1,197 pagesWolfram - A New Kind of SciencegertjanbisschopNo ratings yet
- Deep Learning For Human Beings v2Document110 pagesDeep Learning For Human Beings v2Anya NieveNo ratings yet
- 1 - Perceptron in Machine LearningDocument6 pages1 - Perceptron in Machine LearningAnant JainNo ratings yet
- Multivariate Time Series ModelingDocument7 pagesMultivariate Time Series ModelingShehryar KhanNo ratings yet
- Ecotrix Theory 04Document4 pagesEcotrix Theory 04Nilay chakmaNo ratings yet
- Lab5 PDFDocument7 pagesLab5 PDFThangaGiri BaskaranNo ratings yet
- Continuous Random VariablesDocument20 pagesContinuous Random VariablesAkshay MallNo ratings yet
- Markov Chain - HW4Document3 pagesMarkov Chain - HW4Diego SalazarNo ratings yet
- Multi Layer Perceptron - Neural NetworkDocument3 pagesMulti Layer Perceptron - Neural NetworkKartikaNo ratings yet
- Multilayer Feed Forward Neural NetworkDocument8 pagesMultilayer Feed Forward Neural Networkk SiddarthaprasadNo ratings yet
- Commonly Used Continuous Distributions: 1st Semester 2022Document63 pagesCommonly Used Continuous Distributions: 1st Semester 2022JennysanNo ratings yet
- Lecture 6 Smaller Network: RNN: One X at A Time Re-Use The Same Edge WeightsDocument39 pagesLecture 6 Smaller Network: RNN: One X at A Time Re-Use The Same Edge WeightsChandra Shekhar KadiyamNo ratings yet
- Toc Cia IiiDocument4 pagesToc Cia Iiikavishree 1911No ratings yet
- Deep Learning PPT Full NotesDocument105 pagesDeep Learning PPT Full NotesAkash guptaNo ratings yet
- A Hybrid Deep Neural Network Model For Time Series ForecastingDocument6 pagesA Hybrid Deep Neural Network Model For Time Series ForecastingVelumani sNo ratings yet
- Activation Functions: Sigmoid, Tanh, Relu, Leaky Relu, Prelu, Elu, Threshold Relu and Softmax Basics For Neural Networks and Deep LearningDocument15 pagesActivation Functions: Sigmoid, Tanh, Relu, Leaky Relu, Prelu, Elu, Threshold Relu and Softmax Basics For Neural Networks and Deep LearningRMolina65No ratings yet
- Lesson 1 Introduction To Object Oriented ProgrammingDocument17 pagesLesson 1 Introduction To Object Oriented ProgrammingSofhia Lorainne RollorataNo ratings yet
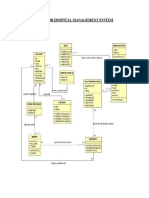
- Uml Diagrams For Hospital Management SystemDocument9 pagesUml Diagrams For Hospital Management Systemjitendra jha100% (1)
- Variable Demand and Lead Time ModelDocument30 pagesVariable Demand and Lead Time ModelVladimir Hery WijannarkoNo ratings yet
- Ad3501 - Deep LearningDocument2 pagesAd3501 - Deep LearningsilambarasanNo ratings yet
- 6 Table 10 T TableDocument1 page6 Table 10 T TableHafidz IkhwanNo ratings yet
- Soft Computing 18CSE13 - 21-6-21Document2 pagesSoft Computing 18CSE13 - 21-6-21ParasNo ratings yet
- Specifications and Notations: Classification Finite State MachinesDocument27 pagesSpecifications and Notations: Classification Finite State Machinesfarhan ahmedNo ratings yet
- Lec1-Introduction To Object-OrientedDocument29 pagesLec1-Introduction To Object-Orientedin time chanalNo ratings yet
- Chap 7 Prob Distributions IIDocument17 pagesChap 7 Prob Distributions IIMbusoThabetheNo ratings yet
- Recurrent Neural Networks For PredictionDocument297 pagesRecurrent Neural Networks For PredictionHWNo ratings yet