You might also like
- Sistem Kendali Digital - Week 2-1-1Document35 pagesSistem Kendali Digital - Week 2-1-1Dedi BobNo ratings yet
- Assignment MANIFOLD FinalDocument17 pagesAssignment MANIFOLD FinalMohamed SaeedNo ratings yet
- Foundstone Hacme Bank User and Solution Guide v2.0Document60 pagesFoundstone Hacme Bank User and Solution Guide v2.0Yeison MorenoNo ratings yet
- Control Systems I: CompensationDocument47 pagesControl Systems I: Compensationi dint knowNo ratings yet
- 351 - 27435 - EE419 - 2016 - 1 - 2 - 1 - 0 3 EE419 Lec6,7 Compensation RLDocument47 pages351 - 27435 - EE419 - 2016 - 1 - 2 - 1 - 0 3 EE419 Lec6,7 Compensation RLtsegayNo ratings yet
- Digital Control Systems (DCS) : Lecture-1-2 Lead CompensationDocument61 pagesDigital Control Systems (DCS) : Lecture-1-2 Lead CompensationMeer Zafarullah NoohaniNo ratings yet
- Unit 2: Compensator DesignDocument49 pagesUnit 2: Compensator Designharish9No ratings yet
- Stability and Control Loop Compensation For SMPSDocument19 pagesStability and Control Loop Compensation For SMPSwafu017No ratings yet
- Chapter 8 (Lag Compensation)Document40 pagesChapter 8 (Lag Compensation)Nischal MaharjanNo ratings yet
- Chapter 8 (Lead Compensation)Document54 pagesChapter 8 (Lead Compensation)Nischal MaharjanNo ratings yet
- Introduction To DesignDocument36 pagesIntroduction To DesignDeepthiNo ratings yet
- Lag CompensationDocument40 pagesLag CompensationMeer Zafarullah NoohaniNo ratings yet
- CHP 5Document69 pagesCHP 5million shiferawNo ratings yet
- 55-700843 Control of Linear Systems: Lecture 3: Poles, Eigenvalues and Stability Routh CriterionDocument17 pages55-700843 Control of Linear Systems: Lecture 3: Poles, Eigenvalues and Stability Routh CriterionSandeep K AugustineNo ratings yet
- Gain & Phase Margin - Bode PlotDocument28 pagesGain & Phase Margin - Bode PlotDeepthiNo ratings yet
- Control Systems (CS) : Lecture-9 Time Domain Analysis of 2 Order SystemsDocument80 pagesControl Systems (CS) : Lecture-9 Time Domain Analysis of 2 Order SystemsSuyash Dahake VlogsNo ratings yet
- CS 16 JntukDocument30 pagesCS 16 JntukKavya MamillaNo ratings yet
- Lag Lead CompensationDocument16 pagesLag Lead CompensationKhin AyeNo ratings yet
- Time Domain Analysis of 2nd Order SystemDocument57 pagesTime Domain Analysis of 2nd Order SystemNicholas NelsonNo ratings yet
- Lecture-4 - S - Plane - Design Nust Masters 2022Document74 pagesLecture-4 - S - Plane - Design Nust Masters 2022Owais JafriNo ratings yet
- Chapter-8 (Lag Lead Compensation)Document16 pagesChapter-8 (Lag Lead Compensation)Nischal MaharjanNo ratings yet
- Chapter 6Document25 pagesChapter 6chalaNo ratings yet
- CH 3Document91 pagesCH 3wehabekodaNo ratings yet
- 0 5 Lec5 EE418 2nd Order SystemsDocument40 pages0 5 Lec5 EE418 2nd Order Systemsyoussef hossamNo ratings yet
- Space Space ModelDocument31 pagesSpace Space ModelGabriel VianaNo ratings yet
- Lecture 22-23-24 Time Domain Analysis of 2nd Order SystemsDocument73 pagesLecture 22-23-24 Time Domain Analysis of 2nd Order SystemsPradeep Kumar Mehta100% (1)
- Lecture #5 Root Locus PDFDocument40 pagesLecture #5 Root Locus PDFسيف الدين SaifEddinNo ratings yet
- Lecture 5Document37 pagesLecture 5Assma MohamedNo ratings yet
- EE6508 - Power Quality - AG - Lecture - 2 (2) .PDDocument31 pagesEE6508 - Power Quality - AG - Lecture - 2 (2) .PDwing fatt hiewNo ratings yet
- T8 - Root Locus Technique - 2021Document51 pagesT8 - Root Locus Technique - 2021James ChanNo ratings yet
- Time Domain Analysis of 2nd Order Systems PDFDocument72 pagesTime Domain Analysis of 2nd Order Systems PDFFAHMI ASSIDIQINo ratings yet
- Lecture 8 - Specification and Limitations: K. J. ÅströmDocument12 pagesLecture 8 - Specification and Limitations: K. J. ÅströmEdutamNo ratings yet
- CS - II (Laplace and M Modelling)Document63 pagesCS - II (Laplace and M Modelling)abdul.baseerNo ratings yet
- Feedback Control Systems (FCS) : Lecture-6 Time Domain Analysis of 2 Order SystemsDocument72 pagesFeedback Control Systems (FCS) : Lecture-6 Time Domain Analysis of 2 Order SystemsAhmed JamalNo ratings yet
- 0 7 Lec7 EE418 Routh - Herwitz - Stability - CriterionDocument58 pages0 7 Lec7 EE418 Routh - Herwitz - Stability - Criterionyoussef hossamNo ratings yet
- Lecture 6 2nd Order System Time ResponseDocument81 pagesLecture 6 2nd Order System Time ResponseFahad ChaudharyNo ratings yet
- Control Systems Design TPDocument7 pagesControl Systems Design TPChhaylySrengNo ratings yet
- Week 6 Design of Discrete ControllersDocument85 pagesWeek 6 Design of Discrete ControllersMetin DurmuşNo ratings yet
- CS Design 01Document13 pagesCS Design 01Prasun SinghalNo ratings yet
- Root Locus: DesignDocument22 pagesRoot Locus: DesignkaanNo ratings yet
- Power Electronics Power Electronics: Course: BookDocument15 pagesPower Electronics Power Electronics: Course: BookFarwa MunirNo ratings yet
- Frequency Response AnalysisDocument33 pagesFrequency Response AnalysisShiraz HusainNo ratings yet
- MIT22 05F09 Lec05Document31 pagesMIT22 05F09 Lec05dmp130No ratings yet
- Spread Spectrum Communications and Jamming Week 2 Course MaterialDocument55 pagesSpread Spectrum Communications and Jamming Week 2 Course MaterialR ChandrasekharNo ratings yet
- Filter Design Assignment 2016-17 EE 338: Digital Signal ProcessingDocument17 pagesFilter Design Assignment 2016-17 EE 338: Digital Signal ProcessingShashank OvNo ratings yet
- Slide 1 - Slide 1Document52 pagesSlide 1 - Slide 1maketoNo ratings yet
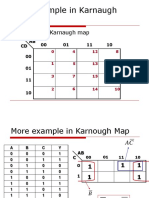
- More Example in Karnaugh MapsDocument27 pagesMore Example in Karnaugh MapsRenatus KatunduNo ratings yet
- Signal Conditioning SystemsDocument20 pagesSignal Conditioning SystemsTeenaNo ratings yet
- A Triggered Monostable Blocking Oscillator: Used in Legacy Channel RepeatersDocument12 pagesA Triggered Monostable Blocking Oscillator: Used in Legacy Channel RepeatersmcamhkNo ratings yet
- Linear Control Systems (EE-3052) : Lecture-12 Introduction To Root LocusDocument25 pagesLinear Control Systems (EE-3052) : Lecture-12 Introduction To Root Locususama asifNo ratings yet
- Nyquist Plot: Plot of in The Complex Plane As Is Varied OnDocument19 pagesNyquist Plot: Plot of in The Complex Plane As Is Varied OnmrkhaireeNo ratings yet
- At Speed AtpgDocument34 pagesAt Speed Atpgsachinsmath15No ratings yet
- Root Locus and Lead Controllers: - Consider The Previous ExampleDocument19 pagesRoot Locus and Lead Controllers: - Consider The Previous Examplewardana_kusuma4493No ratings yet
- Variations On BackpropagationDocument46 pagesVariations On BackpropagationMahyar MohammadyNo ratings yet
- Root LocusDocument114 pagesRoot LocusSwapneel NaphadeNo ratings yet
- 01 CM 1-OnlineDocument25 pages01 CM 1-Onlineyared leulNo ratings yet
- Lec 1 Introduction Frequencty ResponseDocument61 pagesLec 1 Introduction Frequencty ResponseAli AhmadNo ratings yet
- Control Systems (CS) : Lecture-4-5-6 Lag Compensation & Lag-Lead CompensationDocument51 pagesControl Systems (CS) : Lecture-4-5-6 Lag Compensation & Lag-Lead CompensationMeer Zafarullah NoohaniNo ratings yet
- Conical Tank With DEADBEAT ControllerDocument26 pagesConical Tank With DEADBEAT ControllerShivankyJaiswalNo ratings yet
- AE Clase 67Document81 pagesAE Clase 67Daniel StiepovichNo ratings yet
- Two Types of CompensatorsDocument15 pagesTwo Types of CompensatorsLovedeep LoviNo ratings yet
- Homework 1Document4 pagesHomework 1Mohamed SaeedNo ratings yet
- A 162097Document134 pagesA 162097Mohamed SaeedNo ratings yet
- Digsilent WRKDocument62 pagesDigsilent WRKMohamed SaeedNo ratings yet
- Project Description: Base StationDocument2 pagesProject Description: Base StationMohamed SaeedNo ratings yet
- Shi Final ReportDocument12 pagesShi Final ReportMohamed SaeedNo ratings yet
- Lab Report 1Document11 pagesLab Report 1Mohamed SaeedNo ratings yet
- Matlab Report GeneratorDocument8 pagesMatlab Report GeneratorMohamed SaeedNo ratings yet
- 2011 Regs - 20Document95 pages2011 Regs - 20Mohamed SaeedNo ratings yet
- 7 - Design CalculationDocument100 pages7 - Design CalculationMohamed SaeedNo ratings yet
- 27072935Document369 pages27072935Mohamed SaeedNo ratings yet
- Design, Prototyping, and Construction: Mohamad Monibi Jonathan ChenDocument52 pagesDesign, Prototyping, and Construction: Mohamad Monibi Jonathan ChenMohamed SaeedNo ratings yet
- 2008 IASS SLTE 2008 Chi Pauletti PDFDocument10 pages2008 IASS SLTE 2008 Chi Pauletti PDFammarNo ratings yet
- Namma Kalvi 10th English Pta Model Question Papers 217163Document36 pagesNamma Kalvi 10th English Pta Model Question Papers 217163609001No ratings yet
- 3.3 (B) Mole N MassDocument20 pages3.3 (B) Mole N MassFidree AzizNo ratings yet
- The Impact of Teaching PracticeDocument14 pagesThe Impact of Teaching PracticemubarakNo ratings yet
- Board Resolution On Assigning Signatories in The Voucher ProgramDocument2 pagesBoard Resolution On Assigning Signatories in The Voucher ProgramavinmanzanoNo ratings yet
- Bike LanesDocument12 pagesBike LanesChitikala RajeshNo ratings yet
- Jesoc5 1 PDFDocument15 pagesJesoc5 1 PDFfaisal3096No ratings yet
- Manual de Caja Eaton Fuller ET20113Document22 pagesManual de Caja Eaton Fuller ET20113Juan Gomez100% (3)
- Sample Minutes of MeetingDocument3 pagesSample Minutes of MeetingMohamad AzmeerNo ratings yet
- Orchid Group of Companies Company ProfileDocument3 pagesOrchid Group of Companies Company ProfileAngelica Nicole TamayoNo ratings yet
- Downloaded From Manuals Search EngineDocument14 pagesDownloaded From Manuals Search EngineAl AlNo ratings yet
- EEE Sofware Lab Experiment 1, PDFDocument11 pagesEEE Sofware Lab Experiment 1, PDF240 Sadman ShafiNo ratings yet
- Ecoflam Burners 2014 enDocument60 pagesEcoflam Burners 2014 enanonimppNo ratings yet
- RHEL 9.0 - Configuring Device Mapper MultipathDocument59 pagesRHEL 9.0 - Configuring Device Mapper MultipathITTeamNo ratings yet
- Internal Audit, Compliance& Ethics and Risk Management: Section 1) 1.1)Document6 pagesInternal Audit, Compliance& Ethics and Risk Management: Section 1) 1.1)Noora Al ShehhiNo ratings yet
- EmbOS GenericDocument324 pagesEmbOS Genericbogd33No ratings yet
- Activities For Learner-Centered TeachingDocument56 pagesActivities For Learner-Centered TeachingAmiga Mi100% (1)
- Sense and NonsenseDocument263 pagesSense and NonsenseAbdulRehmanKhilji100% (1)
- Chen Probable Cause Affidavit 050714Document7 pagesChen Probable Cause Affidavit 050714USA TODAYNo ratings yet
- National Industrial Policy 2010 (Bangla)Document46 pagesNational Industrial Policy 2010 (Bangla)Md.Abdulla All Shafi0% (1)
- Guide: Daily ReferenceDocument8 pagesGuide: Daily ReferenceGalina TodorovaNo ratings yet
- Parkinson Hoehn and Yahr ScaleDocument3 pagesParkinson Hoehn and Yahr ScaleCarol Artigas GómezNo ratings yet
- Heat TreatmentDocument14 pagesHeat TreatmentAkhilesh KumarNo ratings yet
- A-Health Advance - Application Form With InstructionsDocument14 pagesA-Health Advance - Application Form With InstructionsExsan OthmanNo ratings yet
- InflammationDocument44 pagesInflammationramsiyaNo ratings yet
- Energy Management Assignment #01: Submitted BY Shaheer Ahmed Khan (MS2019198019)Document15 pagesEnergy Management Assignment #01: Submitted BY Shaheer Ahmed Khan (MS2019198019)shaheer khanNo ratings yet
- PA SystemDocument4 pagesPA SystemSnehal DambhareNo ratings yet
- TSAR-1 Reverb Quick GuideDocument1 pageTSAR-1 Reverb Quick GuidedraenkNo ratings yet
- ToobaKhawar 6733 VPL Lab Sat 12 3 All TasksDocument38 pagesToobaKhawar 6733 VPL Lab Sat 12 3 All TasksTooba KhawarNo ratings yet