You might also like
- Elliott Wave Timing Beyond Ordinary Fibonacci MethodsFrom EverandElliott Wave Timing Beyond Ordinary Fibonacci MethodsRating: 4 out of 5 stars4/5 (21)
- What Is MetastabilityDocument4 pagesWhat Is MetastabilityRakesh KumarNo ratings yet
- What Is MetastabilityDocument4 pagesWhat Is MetastabilityKONDA ROHITHNo ratings yet
- MetastabilityDocument10 pagesMetastabilityLalit GohateNo ratings yet
- How A Latch/flip-Flop Goes MetastableDocument3 pagesHow A Latch/flip-Flop Goes MetastableAmena FarhatNo ratings yet
- Meta StabilityDocument16 pagesMeta StabilitySahil SharmaNo ratings yet
- Digital Design Interview QuestionsDocument25 pagesDigital Design Interview Questionsmanohar487No ratings yet
- Digital Design Interview Questions 1Document14 pagesDigital Design Interview Questions 1Mohit TopiwalaNo ratings yet
- VLSI System DesignDocument6 pagesVLSI System DesignbigfatdashNo ratings yet
- Digital Design Interview QuestionsDocument24 pagesDigital Design Interview QuestionsprabhatNo ratings yet
- Digital Interview QuestionsDocument9 pagesDigital Interview Questionsselvi0412No ratings yet
- ) Explain About Setup Time and Hold Time, What Will Happen If There Is Setup Time and Hold Tine Violation, How To Overcome This?Document7 pages) Explain About Setup Time and Hold Time, What Will Happen If There Is Setup Time and Hold Tine Violation, How To Overcome This?Uday KumarNo ratings yet
- STA FinalDocument66 pagesSTA FinalgauravkshriNo ratings yet
- Setup and Hold - PDF Version 1Document15 pagesSetup and Hold - PDF Version 1naniNo ratings yet
- Race ConditionDocument3 pagesRace ConditionD StudiosNo ratings yet
- Metastability: in Altera DevicesDocument11 pagesMetastability: in Altera DeviceskapilpatelNo ratings yet
- Set Hold BasicsDocument17 pagesSet Hold BasicsMelissa AdamsNo ratings yet
- Setup and Hold Time BasicsDocument9 pagesSetup and Hold Time BasicsMahmoud MagdiNo ratings yet
- Unlocking The Phase Lock Loop - Part 2: Tracking and Acquisition BehaviorDocument25 pagesUnlocking The Phase Lock Loop - Part 2: Tracking and Acquisition BehaviorVishnuNo ratings yet
- Enter Post Title HereDocument10 pagesEnter Post Title HereArun JagaNo ratings yet
- Clocks, Signals, and Delays: Figure 1 The Perfect Idealized ClockDocument5 pagesClocks, Signals, and Delays: Figure 1 The Perfect Idealized ClockRoshan RajuNo ratings yet
- Metastability: Jason Smith Id# - 00052646 EE 367 - Prof. Fred Cady March 1, 2002Document5 pagesMetastability: Jason Smith Id# - 00052646 EE 367 - Prof. Fred Cady March 1, 2002sansd2838No ratings yet
- 1 MetastabilityDocument58 pages1 Metastability0106062007No ratings yet
- Setup and Hold TimeDocument6 pagesSetup and Hold TimeShobhit GargNo ratings yet
- TN005 Reset Synchronization v00Document6 pagesTN005 Reset Synchronization v00Brahmam MadamanchiNo ratings yet
- Timing (3rd Internal)Document13 pagesTiming (3rd Internal)Utsav ParasharNo ratings yet
- Timing Analysis: Supplementary NotesDocument6 pagesTiming Analysis: Supplementary NotesSRINIKHIL GollaNo ratings yet
- Metastability and SynchronizationDocument48 pagesMetastability and SynchronizationDollaRaiNo ratings yet
- QUALCOMM Interview Questions 1. Basic View of Compression?Document9 pagesQUALCOMM Interview Questions 1. Basic View of Compression?deepa100% (2)
- DFF Setup Hold ReviewDocument50 pagesDFF Setup Hold ReviewAkanksha221291No ratings yet
- UNIT 5. Background On Timming ConceptsDocument16 pagesUNIT 5. Background On Timming Conceptsjesus barrionuevoNo ratings yet
- Vlsi ConceptsDocument168 pagesVlsi ConceptsSGSNo ratings yet
- (B) (I) Discuss On Two-Phase Locking Protocol and Timestamp-Based ProtocolDocument2 pages(B) (I) Discuss On Two-Phase Locking Protocol and Timestamp-Based Protocolcompiler&automataNo ratings yet
- Tsu and TH - PdfsdfsdsaDocument15 pagesTsu and TH - PdfsdfsdsaasfagehejhdhdsgdfsdfgNo ratings yet
- What Is Setup and Hold Time?Document12 pagesWhat Is Setup and Hold Time?Minu MathewNo ratings yet
- Equations and Impacts of Setup and Hold TimeDocument5 pagesEquations and Impacts of Setup and Hold TimeShravan Kumar AshannagariNo ratings yet
- Digital Design Interview Questions & AnswersDocument8 pagesDigital Design Interview Questions & Answersmohit009dudeNo ratings yet
- 14 Cach Dong Bo Du Lieu - Synchronous TechniquesDocument8 pages14 Cach Dong Bo Du Lieu - Synchronous TechniquesNguyễn Thế TuyênNo ratings yet
- Working of C MOS (Single Edge Triggered)Document4 pagesWorking of C MOS (Single Edge Triggered)Avinash BaldiNo ratings yet
- Equations and Impacts of Setup and Hold TimeDocument5 pagesEquations and Impacts of Setup and Hold Timepavithra reddyNo ratings yet
- Equations and Impacts of Setup and Hold Time: SkewDocument5 pagesEquations and Impacts of Setup and Hold Time: SkewVardhan KarnatiNo ratings yet
- DFT Interview Questions and Answers: 1. Re: Handling Reset During Transition Fault Pattern GenerationDocument10 pagesDFT Interview Questions and Answers: 1. Re: Handling Reset During Transition Fault Pattern GenerationShankhadeep DasNo ratings yet
- QC Interview Qns DFTDocument15 pagesQC Interview Qns DFTdeepaNo ratings yet
- Basics of Latch TimingDocument4 pagesBasics of Latch TimingvikasNo ratings yet
- Time Borrowing Concept in STA - VLSI - Physical Design For FreshersDocument8 pagesTime Borrowing Concept in STA - VLSI - Physical Design For FreshersRA NDYNo ratings yet
- Clock PowerDocument8 pagesClock PowerSathish BalaNo ratings yet
- CounterDocument22 pagesCounterMahesh MahiNo ratings yet
- Setup and Hold Time - Static Timing Analysis (STA) Basic (Part 3a) - VLSI ConceptsDocument3 pagesSetup and Hold Time - Static Timing Analysis (STA) Basic (Part 3a) - VLSI ConceptsRakesh KumarNo ratings yet
- Synchronization and Metastability: Steve GolsonDocument48 pagesSynchronization and Metastability: Steve GolsonkoorapatisagarNo ratings yet
- Static Timing Analysis (Sta)Document8 pagesStatic Timing Analysis (Sta)Bck SreedharNo ratings yet
- Chapter 6: Sequential Logics: IntroductionDocument49 pagesChapter 6: Sequential Logics: IntroductionAffo AlexNo ratings yet
- Digital Qes PDFDocument8 pagesDigital Qes PDFvarun89goelNo ratings yet
- Frequencies.: Transition Fault Model: This Is Considered To Stuck at Fault Model Within A TimeDocument15 pagesFrequencies.: Transition Fault Model: This Is Considered To Stuck at Fault Model Within A TimedeepaNo ratings yet
- Java NotesDocument37 pagesJava NotesSandeep Kumar mehtaNo ratings yet
- cs302 Short Notes and Subjetive Paper For MidtermDocument52 pagescs302 Short Notes and Subjetive Paper For MidtermchashmanmuneerNo ratings yet
- Metastable States in Asynchronous Digital Systems: Avoidable or Unavoidable?Document19 pagesMetastable States in Asynchronous Digital Systems: Avoidable or Unavoidable?mravikrishnaraoNo ratings yet
- Set Up DelayDocument15 pagesSet Up DelayNathan BrooksNo ratings yet
- Universal GatesDocument2 pagesUniversal Gatesaarthi100No ratings yet
- Barrel ShifterDocument2 pagesBarrel Shifteraarthi100No ratings yet
- Electrical Engineering: Signals and SystemsDocument10 pagesElectrical Engineering: Signals and Systemsaarthi100No ratings yet
- Reconfiguration Architectures: by Nagasai.B 108113022Document14 pagesReconfiguration Architectures: by Nagasai.B 108113022aarthi100No ratings yet
- Micro StripDocument22 pagesMicro Stripaarthi100No ratings yet
- 1 Cauchy Sequences: N N J N MDocument3 pages1 Cauchy Sequences: N N J N Maarthi100No ratings yet
- BrainDocument1 pageBrainaarthi100No ratings yet
- TaskerDocument1 pageTaskeraarthi100No ratings yet
- Html5 AudioDocument15 pagesHtml5 Audioaarthi100No ratings yet
- Prayer of The WoodsDocument1 pagePrayer of The Woodsaarthi100No ratings yet
- QuestionnaireDocument5 pagesQuestionnaireaarthi100No ratings yet
- PaintsDocument14 pagesPaintsaarthi100No ratings yet
- Synchronous Asynchronous ModeDocument7 pagesSynchronous Asynchronous Modeaarthi100No ratings yet
- TP913Document5 pagesTP913jmpateiro1985No ratings yet
- Rectangular Wire Die Springs ISO-10243 Standard: Red Colour Heavy LoadDocument3 pagesRectangular Wire Die Springs ISO-10243 Standard: Red Colour Heavy LoadbashaNo ratings yet
- Title To The ProjectDocument14 pagesTitle To The ProjectJatinChadhaNo ratings yet
- Job Description Examples - British GasDocument2 pagesJob Description Examples - British GasIonela IftimeNo ratings yet
- Human Resource Management - Introduction - A Revision Article - A Knol by Narayana RaoDocument7 pagesHuman Resource Management - Introduction - A Revision Article - A Knol by Narayana RaoHimanshu ShuklaNo ratings yet
- Octopus 900 Instructions For UseDocument18 pagesOctopus 900 Instructions For UseAli FadhilNo ratings yet
- Project Proposal - Articulation SessionsDocument8 pagesProject Proposal - Articulation SessionsJhay-are PogoyNo ratings yet
- Odontogenic CystsDocument5 pagesOdontogenic CystsBH ASMRNo ratings yet
- Global Review of Enhances Geothermal SystemDocument20 pagesGlobal Review of Enhances Geothermal SystemKatherine RojasNo ratings yet
- ZX400LCH 5GDocument16 pagesZX400LCH 5Gusmanitp2No ratings yet
- Understanding FreeRTOS SVCDocument11 pagesUnderstanding FreeRTOS SVCshafi hasmani0% (1)
- FranchisingDocument38 pagesFranchisingprasadmahajan26100% (1)
- Universal Marine: Welcome To Our One Stop Marine ServicesDocument8 pagesUniversal Marine: Welcome To Our One Stop Marine Serviceshoangtruongson1111No ratings yet
- Form Ticketing Latihan ContohDocument29 pagesForm Ticketing Latihan ContohASPIN SURYONONo ratings yet
- CPA Taxation by Ampongan - Principles of TaxationDocument43 pagesCPA Taxation by Ampongan - Principles of TaxationVictor Tuco100% (1)
- LEBV4830Document371 pagesLEBV4830anton100% (1)
- 4 A Industrial RevolutionDocument41 pages4 A Industrial Revolutionabekhti2008No ratings yet
- Profile Romblon IslandDocument10 pagesProfile Romblon Islandderella starsNo ratings yet
- How To Configure VFD - General - Guides & How-Tos - CoreELEC ForumsDocument13 pagesHow To Configure VFD - General - Guides & How-Tos - CoreELEC ForumsJemerald MagtanongNo ratings yet
- FAA PUBLICATIONS May Be Purchased or Downloaded For FreeDocument4 pagesFAA PUBLICATIONS May Be Purchased or Downloaded For FreeFlávio AlibertiNo ratings yet
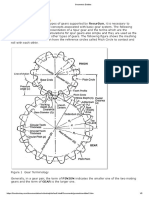
- Geometric Entities: Basic Gear TerminologyDocument5 pagesGeometric Entities: Basic Gear TerminologyMatija RepincNo ratings yet
- Chapter 01Document26 pagesChapter 01zwright172No ratings yet
- Details For Order #002 5434861 1225038: Not Yet ShippedDocument1 pageDetails For Order #002 5434861 1225038: Not Yet ShippedSarai NateraNo ratings yet
- Presentation The New Condominium Rules 9 1 2018 PDFDocument35 pagesPresentation The New Condominium Rules 9 1 2018 PDFYe AungNo ratings yet
- Branding HS TalksDocument17 pagesBranding HS TalksumairNo ratings yet
- BSC IT SyllabusDocument32 pagesBSC IT Syllabusஜூலியன் சத்தியதாசன்No ratings yet
- Model: The Most Accepted and Respected Engine-Driven Cooler in The Gas Compression IndustryDocument2 pagesModel: The Most Accepted and Respected Engine-Driven Cooler in The Gas Compression IndustryparathasiNo ratings yet
- ShapiroDocument34 pagesShapiroTanuj ShekharNo ratings yet
- Mine Gases (Part 1)Document15 pagesMine Gases (Part 1)Melford LapnawanNo ratings yet
- Product Information DIGSI 5 V07.50Document56 pagesProduct Information DIGSI 5 V07.50g-bearNo ratings yet