You might also like
- Modelo de Control Interno KINGDocument2 pagesModelo de Control Interno KINGMailas Eduardo92% (12)
- Verificacion de DisponibilidadDocument9 pagesVerificacion de Disponibilidadcarlosordoz100% (1)
- Roberto Rojas Gutiérrez Tarea Semana 6 Administración Estratégica de VentasDocument8 pagesRoberto Rojas Gutiérrez Tarea Semana 6 Administración Estratégica de VentasRoberto RojasNo ratings yet
- Proyecto de Radio EscolarDocument8 pagesProyecto de Radio EscolarFernandoAgostinhoPereiraNo ratings yet
- Estabilidad RelativaDocument28 pagesEstabilidad RelativaMarco Alejandro50% (2)
- Criterio de Estabilildad NyquistDocument15 pagesCriterio de Estabilildad NyquistDerlis Romero100% (6)
- Acta Visualización de VideoDocument46 pagesActa Visualización de VideoRafael Rodríguez100% (3)
- Trigonometría TeoríaDocument5 pagesTrigonometría TeoríaPedro SebastianNo ratings yet
- CUADRICASDocument21 pagesCUADRICASRuben Marcelo PradoNo ratings yet
- Diagramas de NicholsDocument8 pagesDiagramas de NicholsLaura Berrout Ramos100% (1)
- Lugar geométrico de las raíces de un sistema de controlDocument18 pagesLugar geométrico de las raíces de un sistema de controldavid castañedaNo ratings yet
- Criterio de Estabilidad de Nyquist EXPONERDocument22 pagesCriterio de Estabilidad de Nyquist EXPONERLuciano Ezequiel Quinto ContrerasNo ratings yet
- Control II - Criterio de Estabilidad de NyquistDocument20 pagesControl II - Criterio de Estabilidad de NyquistJovany Salazar100% (1)
- CriterioNyquistEstabilidadSistemasDocument4 pagesCriterioNyquistEstabilidadSistemasPablo César Rodríguez VargasNo ratings yet
- Criterio de Nyquist para determinar la estabilidad de un sistema en lazo cerradoDocument8 pagesCriterio de Nyquist para determinar la estabilidad de un sistema en lazo cerradoFATIMA MARGARITA LOPEZ MAGANANo ratings yet
- Criterio de Estabilidad de NyquistDocument8 pagesCriterio de Estabilidad de NyquistsergzshNo ratings yet
- JimitoaivaDocument21 pagesJimitoaivaRomeo TonconiNo ratings yet
- Criterio de Estabilidad de NyquistDocument6 pagesCriterio de Estabilidad de NyquistLuis CoronadoNo ratings yet
- Nyquist para Funciones de Fase Minima y No MinimaDocument5 pagesNyquist para Funciones de Fase Minima y No MinimarxaviervaNo ratings yet
- Areas Con Integrales de SuperficieDocument12 pagesAreas Con Integrales de SuperficieKetzel GàlvezNo ratings yet
- GCS8Document3 pagesGCS8mirianNo ratings yet
- Diagrama de NyquistDocument6 pagesDiagrama de NyquistAntonio Jesus LeonNo ratings yet
- Practica (Parte 2)Document7 pagesPractica (Parte 2)willenNo ratings yet
- SistemaCoordenadasPolaresDocument7 pagesSistemaCoordenadasPolaresJunior Artur Carmen VilelaNo ratings yet
- Criterio de Nyquist MejoradoDocument24 pagesCriterio de Nyquist MejoradorambetsNo ratings yet
- Coordenadas polaresDocument11 pagesCoordenadas polaresnayshaNo ratings yet
- Coordenadas PolaresDocument7 pagesCoordenadas Polarescristian escobar clementeNo ratings yet
- Coordenadas Polares Vectorial 1234Document23 pagesCoordenadas Polares Vectorial 1234Alejandro HernandezNo ratings yet
- Criterio de Nyquist para el análisis de estabilidad en el dominio de la frecuenciaDocument9 pagesCriterio de Nyquist para el análisis de estabilidad en el dominio de la frecuencialaura andrea BermudezNo ratings yet
- Introducción a la Geometría AnalíticaDocument36 pagesIntroducción a la Geometría AnalíticaSammy Campero AlcarazNo ratings yet
- Divergencia y Rotacional Tarea .Document5 pagesDivergencia y Rotacional Tarea .Alan SamuelNo ratings yet
- Áreas en coordenadas polaresDocument19 pagesÁreas en coordenadas polaresVerónica FloresNo ratings yet
- Línea recta: pendiente, ángulo de inclinación y condiciones de paralelismoDocument3 pagesLínea recta: pendiente, ángulo de inclinación y condiciones de paralelismoManu FuafuaNo ratings yet
- NYQUISTDocument40 pagesNYQUISTJuan Carlos Landa HuamactoNo ratings yet
- 02 - Criterio de Estabilildad NyquistDocument26 pages02 - Criterio de Estabilildad NyquistDario GrünfeldNo ratings yet
- Criterio de Estabilidad de NyquistDocument2 pagesCriterio de Estabilidad de NyquistIsaac RoldanNo ratings yet
- Presentacion Criterio NyquistDocument37 pagesPresentacion Criterio NyquistNicolas VieraNo ratings yet
- 02-Criterio de Estabilildad NyquistDocument21 pages02-Criterio de Estabilildad NyquistFabián MedinaNo ratings yet
- Cal Vectc7Document160 pagesCal Vectc7Jhon Edison Bravo BuitragoNo ratings yet
- Calculo Vectorial en 3DDocument193 pagesCalculo Vectorial en 3DJuanFonsecaNo ratings yet
- Cal Vectc3Document72 pagesCal Vectc3Antonio Pérez PérezNo ratings yet
- Trabajo 1 PosibleDocument27 pagesTrabajo 1 PosibleCalixto BenavidesNo ratings yet
- Coordenadas CilindricasDocument15 pagesCoordenadas CilindricasRuben Alvarez VenturaNo ratings yet
- Diagrama Nyquist Ziegler NicholsDocument5 pagesDiagrama Nyquist Ziegler NicholsJuan D HackNo ratings yet
- Clase 4.1coordenadas Esfericas y CilindricasDocument13 pagesClase 4.1coordenadas Esfericas y CilindricasSanthier Mosquera AmpudiaNo ratings yet
- Clase03 y 04-Diagrama de Nyquist-EstabilidadDocument35 pagesClase03 y 04-Diagrama de Nyquist-EstabilidadAlex LinaresNo ratings yet
- Cap 2, Vectores en El Espacio IIIDocument67 pagesCap 2, Vectores en El Espacio IIIAnabel TorresNo ratings yet
- TangenteDocument7 pagesTangenteJORGE ALBERTO MARTINEZ PASTORNo ratings yet
- Guiacoordenadaspolares 191205215932Document27 pagesGuiacoordenadaspolares 191205215932Jesus GomezNo ratings yet
- Optica 11 May 09Document20 pagesOptica 11 May 09AlexNo ratings yet
- Trazado de rayos analítico sin ambigüedadesDocument11 pagesTrazado de rayos analítico sin ambigüedadesAaron CastilloNo ratings yet
- Geometría DiferencialDocument3 pagesGeometría DiferencialPaul Mariatte Blue100% (1)
- Lugar de Las RaícesDocument6 pagesLugar de Las RaícesAndres GgaNo ratings yet
- Agm de Mate Coordenadas ViernDocument23 pagesAgm de Mate Coordenadas ViernMelanie MorenoNo ratings yet
- Clase 40Document61 pagesClase 40Nick S. Zegarra ChavezNo ratings yet
- Introducción Al Criterio de NyquistDocument6 pagesIntroducción Al Criterio de NyquistIon V Der VamcNo ratings yet
- 26 - 01 Trabajo de Investigación Unidad VDocument10 pages26 - 01 Trabajo de Investigación Unidad VIsaac GalavizNo ratings yet
- Respuesta en frecuencia de sistemas a entradas sinusoidalesDocument118 pagesRespuesta en frecuencia de sistemas a entradas sinusoidalesChristian ValenciaNo ratings yet
- Coordenadas PolaresDocument5 pagesCoordenadas PolaresAndres MontielNo ratings yet
- Coordenadas Polares TrabajoDocument25 pagesCoordenadas Polares TrabajolucaNo ratings yet
- LGR: Lugar geométrico de raíces para análisis de sistemas de controlDocument8 pagesLGR: Lugar geométrico de raíces para análisis de sistemas de controlWiliam HernandezNo ratings yet
- Diagrama de Gantt LeandroDocument4 pagesDiagrama de Gantt LeandroLeandro C UgNo ratings yet
- CV Alan Mendoza ChavezDocument4 pagesCV Alan Mendoza ChavezCh1nuk0No ratings yet
- Qué Es Un Organigrama de EmpresasDocument10 pagesQué Es Un Organigrama de EmpresasEileen Facundo VelezNo ratings yet
- Micro Pro Ces AdoresDocument10 pagesMicro Pro Ces AdoresGaby JcNo ratings yet
- PR Ctica 3 Servicios de Asterisk Aplicaciones Del Plan de MarcadoDocument13 pagesPR Ctica 3 Servicios de Asterisk Aplicaciones Del Plan de MarcadoDaniela Bedoya BravoNo ratings yet
- Esquema Normas UpelDocument7 pagesEsquema Normas UpelKatiuska MendezNo ratings yet
- prSI1 GEBD 1819Document84 pagesprSI1 GEBD 1819JoséMaríaSerranoSánchezNo ratings yet
- TEMA Nociones Básicas - RedesDocument10 pagesTEMA Nociones Básicas - RedesMariano Luque RayaNo ratings yet
- Brief de Diseño y PDSDocument4 pagesBrief de Diseño y PDSRodriguez Paez GermanNo ratings yet
- Evolución normas cableadoDocument7 pagesEvolución normas cableadon1caNo ratings yet
- Reporte de Practica de Hidraulica ProporcionalDocument6 pagesReporte de Practica de Hidraulica ProporcionalJorge Francisco Le�n OrozcoNo ratings yet
- Documental Tema 5.1.3 Aplicaciones de Integracion y Derivación NuméricaDocument35 pagesDocumental Tema 5.1.3 Aplicaciones de Integracion y Derivación NuméricaAldo Antonio Pacab FuentesNo ratings yet
- Manual AYRNC PDFDocument26 pagesManual AYRNC PDFJose ROJAS RODRIGUEZNo ratings yet
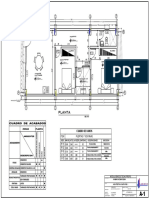
- ESPECIALIDADES - HUAMAN DIAZ MARCELINA-Model PDFDocument1 pageESPECIALIDADES - HUAMAN DIAZ MARCELINA-Model PDFRM AngelNo ratings yet
- Ingeniería en minería: Ventilación, peligros y tipos de extintoresDocument24 pagesIngeniería en minería: Ventilación, peligros y tipos de extintoresDalia Gonzalez AcostaNo ratings yet
- Registro Evaluación Salida Educación Primaria Secundaria MoyobambaDocument5 pagesRegistro Evaluación Salida Educación Primaria Secundaria MoyobambaPiter Galoc TelloNo ratings yet
- Dialogos Agente F Respuestas RapidasDocument12 pagesDialogos Agente F Respuestas RapidasDaniela castellanosNo ratings yet
- El TransistorDocument16 pagesEl TransistorAlicia ColemanNo ratings yet
- Excel Core 2016 Lesson 04Document43 pagesExcel Core 2016 Lesson 04lubicanNo ratings yet
- Mapa Mental Modelo RupDocument1 pageMapa Mental Modelo RupJorgeNo ratings yet
- IAA - Informática aplicada a la administraciónDocument17 pagesIAA - Informática aplicada a la administraciónArturo Edition RomeroNo ratings yet
- c9 PDF RP Rueda CifradoDocument8 pagesc9 PDF RP Rueda CifradoJosé Miguel Galeano PájaroNo ratings yet
- Sistemas HDCVI cámaras minidoms grabadorasDocument36 pagesSistemas HDCVI cámaras minidoms grabadorasAlvarito Rodriguez DelgadilloNo ratings yet
- MediaCenter en Linux Ubuntu Alternate (VinoCenter) PDFDocument109 pagesMediaCenter en Linux Ubuntu Alternate (VinoCenter) PDFakinramirezNo ratings yet