You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Well Logs Facies DefinitionDocument5 pagesWell Logs Facies DefinitionAngel Saldaña100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Theory of Seismic Imaging PDFDocument226 pagesTheory of Seismic Imaging PDFAngel SaldañaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Batuan ini mempunyai ciri fisik yaitu warna segar putih, warna lapuk kuning kecoklatan, tekstur klastik kasar dan bentuk material membundar (brounded). Batuan ini mempunyai struktur masif dengan ukuran butir pasir kasar, berdasarkan ciri fisik di atas maka dapat disimpulkan bahwa nama batuan ini Tufa kasar. Material penyusun batuan ini berasal dari hasil aktivitas vulkanisme yang bersifat eksflosif. Material piroklastik yang berukuran butir pasir kasar terlempar jauh dari pusat erupsi kemudian jatuh dan tertransportasi ke dasar cekungan yang stabil. Kemudian terjadi proses sedimentasi, berlanjut dengan proses kompaksi dan sementasi hingga lithifikasi atau proses pembatuan. Ukuran butir yang kasar dan bentuk yang relatif membundar menunjukkan bahwa material penyusun batuan ini terendapkan pada arus tenang menghasilkan struktur perlapisan yang tipis yangdisebut laminasi. Berdasarkan kondisi arus yang berpengaruh dan struktur sedimen yang terbentuk maka dapat diinterpretasikan bahwa lDocument60 pagesBatuan ini mempunyai ciri fisik yaitu warna segar putih, warna lapuk kuning kecoklatan, tekstur klastik kasar dan bentuk material membundar (brounded). Batuan ini mempunyai struktur masif dengan ukuran butir pasir kasar, berdasarkan ciri fisik di atas maka dapat disimpulkan bahwa nama batuan ini Tufa kasar. Material penyusun batuan ini berasal dari hasil aktivitas vulkanisme yang bersifat eksflosif. Material piroklastik yang berukuran butir pasir kasar terlempar jauh dari pusat erupsi kemudian jatuh dan tertransportasi ke dasar cekungan yang stabil. Kemudian terjadi proses sedimentasi, berlanjut dengan proses kompaksi dan sementasi hingga lithifikasi atau proses pembatuan. Ukuran butir yang kasar dan bentuk yang relatif membundar menunjukkan bahwa material penyusun batuan ini terendapkan pada arus tenang menghasilkan struktur perlapisan yang tipis yangdisebut laminasi. Berdasarkan kondisi arus yang berpengaruh dan struktur sedimen yang terbentuk maka dapat diinterpretasikan bahwa lAgung PerdanaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
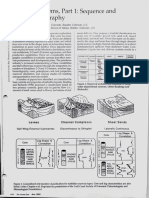
- Turbidite Systems, Part 1Document6 pagesTurbidite Systems, Part 1Angel SaldañaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Fundamentals of 3D Volume VisualizationDocument8 pagesFundamentals of 3D Volume VisualizationAngel SaldañaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Carbonate Platform Facies Models PDFDocument21 pagesCarbonate Platform Facies Models PDFAngel SaldañaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Carbonate TurbiditesDocument19 pagesCarbonate TurbiditesAngel SaldañaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Basic Log Interpretation - HLSDocument107 pagesBasic Log Interpretation - HLSDavide Boreaneze100% (7)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Seismic Facies and Sedimentary Processes PDFDocument135 pagesSeismic Facies and Sedimentary Processes PDFAngel SaldañaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Power Off Reset Reason BackupDocument5 pagesPower Off Reset Reason Backupmohamed ahmedNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Nut & Bolt ScienceDocument3 pagesNut & Bolt SciencetanujaayerNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- ACPS CP S1 01 FDA SlidesDocument78 pagesACPS CP S1 01 FDA SlidesBlueSagaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Chapter 2 Maternal Anatomy WilliamsDocument60 pagesChapter 2 Maternal Anatomy WilliamsDiskaAstariniNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Periodic Table of ElementsDocument60 pagesPeriodic Table of ElementsruchitlpatelNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Operating and Maintenance Manual 322375H01 Rev CDocument82 pagesOperating and Maintenance Manual 322375H01 Rev CGustavo BarbosaNo ratings yet
- Rsa Netwitness Logs and Packets: Server, Dac and San HW SpecificationsDocument10 pagesRsa Netwitness Logs and Packets: Server, Dac and San HW SpecificationsfunyiroemberNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- AMC2019 StudentsResults Indonesia 8JDocument4 pagesAMC2019 StudentsResults Indonesia 8JWinety Kristiana DewiNo ratings yet
- Hemoglobin A1c: A) MES 2-Morpholinoethane Sulfonic Acid B) TRIS Tris (Hydroxymethyl) - AminomethaneDocument6 pagesHemoglobin A1c: A) MES 2-Morpholinoethane Sulfonic Acid B) TRIS Tris (Hydroxymethyl) - Aminomethanejoudi.jou95No ratings yet
- 5.4.1 EM Patch Release NotesDocument11 pages5.4.1 EM Patch Release Notessuraj saketNo ratings yet
- Critically Reviewing The Literature ClassDocument32 pagesCritically Reviewing The Literature ClassSoman Rajpoot100% (1)
- Precima Frenos FDW ATEX Operating InstructionsDocument6 pagesPrecima Frenos FDW ATEX Operating InstructionsToni RenedoNo ratings yet
- Direct Synthesis of Sodalite From Kaolin: The Influence of AlkalinityDocument7 pagesDirect Synthesis of Sodalite From Kaolin: The Influence of AlkalinityIsye RahmaenaNo ratings yet
- Modern Age Waste Water ProblemsDocument364 pagesModern Age Waste Water Problemsromaehab201912No ratings yet
- HVSI804T WGD 83Document6 pagesHVSI804T WGD 83mnezamiNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Determinants of Income InequalityDocument30 pagesDeterminants of Income InequalityKorawit Booranakit100% (1)
- Tutorial - How To Use The Poser Format ExporterDocument7 pagesTutorial - How To Use The Poser Format ExporterMimhypopbummilha SwuNo ratings yet
- New Model For Predicting Thermal Radiation From Flares and High Pressure Jet Fires For Hydrogen and SyngasDocument15 pagesNew Model For Predicting Thermal Radiation From Flares and High Pressure Jet Fires For Hydrogen and Syngasthlim19078656No ratings yet
- Assignment 176020307045 PDFDocument82 pagesAssignment 176020307045 PDFnikita gohelNo ratings yet
- QE and Complex Numbers DPPDocument9 pagesQE and Complex Numbers DPPsatishmhbdNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- LogDocument7 pagesLogHerdi YantoNo ratings yet
- Tarea Stereonet-HelpDocument32 pagesTarea Stereonet-HelpJosueHuillcaPortilloNo ratings yet
- Grammar 111Document33 pagesGrammar 111Suntithvibol Sem100% (1)
- Abhilash Betanamudi: AchievementsDocument3 pagesAbhilash Betanamudi: AchievementsAbhilashBetanamudiNo ratings yet
- Python ProgramDocument3 pagesPython ProgramGOKUL BNo ratings yet
- DCS800 Firmware Manual EnglishDocument298 pagesDCS800 Firmware Manual EnglishMadson FernandesNo ratings yet
- Alarm ListDocument4 pagesAlarm ListMirela Perenda ŠabićNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mole Concept - L1rr PDFDocument27 pagesMole Concept - L1rr PDFLegend KillerNo ratings yet
- Chapter 3 Ni ChupaghettiDocument2 pagesChapter 3 Ni ChupaghettiRodemar RosarioNo ratings yet
- Manual Dimmer BukeDocument10 pagesManual Dimmer BukeJavi KatzNo ratings yet