You might also like
- Adaptive Control: Presented by Harikrishna Satish.TDocument22 pagesAdaptive Control: Presented by Harikrishna Satish.THari ThotaNo ratings yet
- 18 Adaptive ControlDocument7 pages18 Adaptive ControlFathi MusaNo ratings yet
- 8 Feedback Loops: Block Diagram of A Laser SystemDocument4 pages8 Feedback Loops: Block Diagram of A Laser SystemamarvuthaNo ratings yet
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Optimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranDocument6 pagesOptimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranztztztztNo ratings yet
- Presentation 4 - January 2019Document35 pagesPresentation 4 - January 2019Muavha MadembeNo ratings yet
- LCS Lab 3Document11 pagesLCS Lab 3Waleed RazzaqNo ratings yet
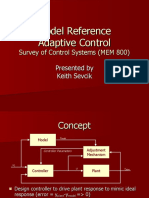
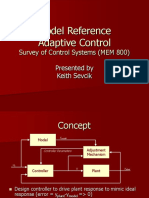
- Survey of Control Systems (MEM 800) PresentedDocument26 pagesSurvey of Control Systems (MEM 800) PresentedvananhbarcaNo ratings yet
- Aspects of Using The Sensitivity Theory in Energetical Optimization ProblemsDocument5 pagesAspects of Using The Sensitivity Theory in Energetical Optimization ProblemsAneta HaziNo ratings yet
- Adaptive Control 2Document30 pagesAdaptive Control 2kanchiNo ratings yet
- Adaptive Output Feedback Control Based On Neural Networks 2009 IFAC ProceediDocument6 pagesAdaptive Output Feedback Control Based On Neural Networks 2009 IFAC ProceediKeneni AlemayehuNo ratings yet
- Multiloop Control SystemDocument4 pagesMultiloop Control SystemAkash SahaNo ratings yet
- TVTIx Chapter6 EACT631 AdaptiveControl2Document30 pagesTVTIx Chapter6 EACT631 AdaptiveControl2abata yohannesNo ratings yet
- Adaptive PID ControllerDocument6 pagesAdaptive PID ControllerabhinavparkheNo ratings yet
- Non Linear ControlDocument15 pagesNon Linear Controlatom tuxNo ratings yet
- Operator Tuning in Fuzzy Production Rules Using Neural NetworksDocument6 pagesOperator Tuning in Fuzzy Production Rules Using Neural Networksfree5050No ratings yet
- Online Dynamic Parameter Estimation of Transformer Equivalent CircuitDocument5 pagesOnline Dynamic Parameter Estimation of Transformer Equivalent Circuitwilver condori chambiNo ratings yet
- 1978 - Stable Adaptive Controller Design-Direct Control (Narendra)Document14 pages1978 - Stable Adaptive Controller Design-Direct Control (Narendra)ademargcjuniorNo ratings yet
- Variational and Symplectic Approach of The Model-Free ControlDocument20 pagesVariational and Symplectic Approach of The Model-Free ControlgliptakNo ratings yet
- Model Reference Adaptive ControlDocument22 pagesModel Reference Adaptive Controlasusd112550% (4)
- 11 441 1 PBDocument6 pages11 441 1 PBkkaytugNo ratings yet
- Analysis and Optimal Control of Pulse Width Modulation PDFDocument10 pagesAnalysis and Optimal Control of Pulse Width Modulation PDFzaenalNo ratings yet
- Model Reference Adaptive Control: Survey of Control Systems (MEM 800)Document26 pagesModel Reference Adaptive Control: Survey of Control Systems (MEM 800)Gilmar LeiteNo ratings yet
- ScaraDocument7 pagesScaraAnand Kumar MishraNo ratings yet
- Santa 2Document9 pagesSanta 2Vashik BedasieNo ratings yet
- PPGEL - CEFET-MG & CEFET-MG / Campus Divin Opolis R. Alvares Azevedo, 400, 35500-970 Divin Opolis, MG, BrasilDocument6 pagesPPGEL - CEFET-MG & CEFET-MG / Campus Divin Opolis R. Alvares Azevedo, 400, 35500-970 Divin Opolis, MG, BrasilPTR77No ratings yet
- Fedbak CNTRL RevDocument35 pagesFedbak CNTRL RevMisge ChekoleNo ratings yet
- Design of Indirect MRAS-based Adaptive Control SystemsDocument5 pagesDesign of Indirect MRAS-based Adaptive Control SystemsThiện DũngNo ratings yet
- Adaptive ControlDocument26 pagesAdaptive ControlKiran RavyNo ratings yet
- Fuzzy Tracking Control Based On H Infinity For Performance For Permanent Magnet Synchronous MachineDocument7 pagesFuzzy Tracking Control Based On H Infinity For Performance For Permanent Magnet Synchronous MachinemezianeNo ratings yet
- Ambo University: Regulation and ControlDocument20 pagesAmbo University: Regulation and ControlFikadu EshetuNo ratings yet
- Closed Loop SystemsDocument11 pagesClosed Loop SystemsMohamed RashidNo ratings yet
- Sensing - Universal PID-Thermoregulator: Application Note AbstractDocument19 pagesSensing - Universal PID-Thermoregulator: Application Note Abstractnqdinh100% (2)
- An Adaptive Nonlinear Pid Controller PDFDocument5 pagesAn Adaptive Nonlinear Pid Controller PDFRodrigo ContrerasNo ratings yet
- Maximum Power Point Tracking in The PV Grid-Connected Inverters of 5KWDocument4 pagesMaximum Power Point Tracking in The PV Grid-Connected Inverters of 5KWwalidghoneim1970No ratings yet
- On A New Approach For The Simulation of Transients in Power Systems Mahseredjian2007Document7 pagesOn A New Approach For The Simulation of Transients in Power Systems Mahseredjian2007dankorankoNo ratings yet
- Avr PDFDocument5 pagesAvr PDFbrmamorNo ratings yet
- 0291 Icnsc231Document6 pages0291 Icnsc231Karthik Annamalai N RNo ratings yet
- ELDI2002 Ali HerssiDocument5 pagesELDI2002 Ali Herssiali herssiNo ratings yet
- Analysis and Design of A Multiple Feedback Loop Control Strategy For Single-Phase Voltage-Source UPS InvertersDocument10 pagesAnalysis and Design of A Multiple Feedback Loop Control Strategy For Single-Phase Voltage-Source UPS InvertersMary NdhlovuNo ratings yet
- An Introduction To Nonlinear Model Predictive ControlDocument23 pagesAn Introduction To Nonlinear Model Predictive ControlsaeedNo ratings yet
- Revealing Loads Having The Biggest Influence On Power System Small Disturbance ST AbilityDocument6 pagesRevealing Loads Having The Biggest Influence On Power System Small Disturbance ST AbilityRODRIGUEZ CRISTOBAL JUAN JHIAMPIERNo ratings yet
- Week14pidmay242016pe3032 160530081519Document57 pagesWeek14pidmay242016pe3032 160530081519AztvNo ratings yet
- Magnitude Symetric Optimum CriterionDocument9 pagesMagnitude Symetric Optimum CriterionasuhuaneNo ratings yet
- Lab 4 - Proportional Control (Wong)Document17 pagesLab 4 - Proportional Control (Wong)zinilNo ratings yet
- Ghamrawi (2016)Document6 pagesGhamrawi (2016)RizkiNo ratings yet
- 4 - Introduction To Control SystemsDocument27 pages4 - Introduction To Control SystemsDmitrii FedorovNo ratings yet
- AnswersDocument5 pagesAnswersShaik RoshanNo ratings yet
- Simulation of MIT Rule-Based Adaptive Controller of A Power Plant SuperheaterDocument8 pagesSimulation of MIT Rule-Based Adaptive Controller of A Power Plant SuperheaterAji Eka MahendraNo ratings yet
- Experiment No.: - 1: To Study The DC Servomotor CharacteristicsDocument50 pagesExperiment No.: - 1: To Study The DC Servomotor CharacteristicsNobita NobiNo ratings yet
- Online Identification of PMSM Parameters: Parameter Identifiability and Estimator Comparative StudyDocument14 pagesOnline Identification of PMSM Parameters: Parameter Identifiability and Estimator Comparative StudyDahnoun IlyasNo ratings yet
- T3P4Document13 pagesT3P4Yainel FariNo ratings yet
- 2nd Order Dampening of Mechanical SystemDocument4 pages2nd Order Dampening of Mechanical SystemMartinNo ratings yet
- Nonlinear P-I Controller Design For Switchmode Dc-To-Dc Power ConvertersDocument8 pagesNonlinear P-I Controller Design For Switchmode Dc-To-Dc Power ConvertersDipanjan DasNo ratings yet
- Mechatronics Unit III and IV Question and AnswersDocument6 pagesMechatronics Unit III and IV Question and AnswersSaravanan MathiNo ratings yet
- Model Refrence Adaptive Control Presentation by RishiDocument63 pagesModel Refrence Adaptive Control Presentation by RishiRishi Kant Sharma100% (5)
- 1.an Advanced Control Strategy For Magnetic Levitation Train System Based On An Online Adaptive Pid ControllerDocument6 pages1.an Advanced Control Strategy For Magnetic Levitation Train System Based On An Online Adaptive Pid ControllerManuel DíazNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Obj English5Document4 pagesObj English5Bharat Chandra SahuNo ratings yet
- 3D Reconstruction Based On Stereovision and Texture MappingDocument6 pages3D Reconstruction Based On Stereovision and Texture MappingBharat Chandra SahuNo ratings yet
- Electrical CircuitDocument81 pagesElectrical CircuitBharat Chandra SahuNo ratings yet
- Tutorial 8 - Raster Data Analysis: ObjectivesDocument21 pagesTutorial 8 - Raster Data Analysis: Objectiveskarmvir27No ratings yet
- Understanding Enzymes - Trevor Palmer PDFDocument400 pagesUnderstanding Enzymes - Trevor Palmer PDFKhyal Dave86% (22)
- Cut and Fill - 1 PDFDocument5 pagesCut and Fill - 1 PDFHabeeb MaruuNo ratings yet
- Impedancematchinginawr 160207151307Document12 pagesImpedancematchinginawr 160207151307Bharat Chandra SahuNo ratings yet
- 10 1 1 61 2075Document136 pages10 1 1 61 2075Bharat Chandra SahuNo ratings yet
- General Awareness: Staff Selection Commission Combined Preliminary (Graduate Level) Exam Held On The 27th February, 2000Document3 pagesGeneral Awareness: Staff Selection Commission Combined Preliminary (Graduate Level) Exam Held On The 27th February, 2000Bharat Chandra SahuNo ratings yet
- Ch2 Antenna BasicsDocument46 pagesCh2 Antenna BasicsChihyun Cho100% (1)
- CS231a FinalReport SgmccannDocument10 pagesCS231a FinalReport SgmccannBharat Chandra SahuNo ratings yet
- A Prediction Study of Path Loss Models From 2-73.5 GHZ in An Urban-Macro EnvironmentDocument5 pagesA Prediction Study of Path Loss Models From 2-73.5 GHZ in An Urban-Macro EnvironmentBharat Chandra SahuNo ratings yet
- General Awareness: Solved Paper of Staff Selection Commission Section Officers' ExamDocument3 pagesGeneral Awareness: Solved Paper of Staff Selection Commission Section Officers' ExamBharat Chandra SahuNo ratings yet
- 06478487Document4 pages06478487Bharat Chandra SahuNo ratings yet
- Assignemnt NoDocument2 pagesAssignemnt NoBharat Chandra SahuNo ratings yet
- 1703 06376 PDFDocument5 pages1703 06376 PDFBharat Chandra SahuNo ratings yet
- Impedancematchinginawr 160207151307Document12 pagesImpedancematchinginawr 160207151307Bharat Chandra SahuNo ratings yet
- Sensors 13 11007Document25 pagesSensors 13 11007Vishal NairNo ratings yet
- CalibrationDocument46 pagesCalibrationBharat Chandra SahuNo ratings yet
- Image Features Detection, Description and Matching: M. Hassaballah, Aly Amin Abdelmgeid and Hammam A. AlshazlyDocument36 pagesImage Features Detection, Description and Matching: M. Hassaballah, Aly Amin Abdelmgeid and Hammam A. AlshazlyBharat Chandra SahuNo ratings yet
- Assignment No 1Document7 pagesAssignment No 1Bharat Chandra SahuNo ratings yet
- Experiment No.: 05 Building A Direct Sequence Spread Spectrum ModelDocument6 pagesExperiment No.: 05 Building A Direct Sequence Spread Spectrum ModelBharat Chandra SahuNo ratings yet
- 1608 05384v2Document6 pages1608 05384v2Bharat Chandra SahuNo ratings yet
- Journal Pone 0173627Document15 pagesJournal Pone 0173627Bharat Chandra SahuNo ratings yet
- Moons 09Document113 pagesMoons 09Bharat Chandra SahuNo ratings yet
- Psu ContactDocument6 pagesPsu ContactBharat Chandra SahuNo ratings yet
- Task VHDLDocument10 pagesTask VHDLBharat Chandra SahuNo ratings yet
- EE-636-MLE-IV - Parameter Estimation PDFDocument50 pagesEE-636-MLE-IV - Parameter Estimation PDFBharat Chandra SahuNo ratings yet
- Model Reference Adaptive 25-3-2015Document86 pagesModel Reference Adaptive 25-3-2015Bharat Chandra SahuNo ratings yet
- Session: 2014 - 2015 (Spring)Document2 pagesSession: 2014 - 2015 (Spring)Bharat Chandra SahuNo ratings yet
- Design and Analysis Final 01Document26 pagesDesign and Analysis Final 01Rajat SharmaNo ratings yet
- Lesson Plan in Math 10Document5 pagesLesson Plan in Math 10raymart zalunNo ratings yet
- Deathbound SubjectivityDocument109 pagesDeathbound SubjectivityAnonymous IfYLvzpmFeNo ratings yet
- Cbse 10 TH Maths Formulas Basic Algebraic IdentitiesDocument7 pagesCbse 10 TH Maths Formulas Basic Algebraic Identities10B-10.BHUMIKA KOCHARNo ratings yet
- Regression Analysis On Black ScholesDocument2 pagesRegression Analysis On Black ScholesjasonNo ratings yet
- Lec 6-7-8 DSDocument36 pagesLec 6-7-8 DSSehrish AliNo ratings yet
- Hadamard Matrix Analysis and Synthesis With Applications To Communications and Signal Image ProcessingDocument119 pagesHadamard Matrix Analysis and Synthesis With Applications To Communications and Signal Image ProcessingEmerson MaucaNo ratings yet
- Inverse Jeemain - GuruDocument32 pagesInverse Jeemain - GuruNeetu GuptaNo ratings yet
- WWW - Mycourses.co - Za: or Tambo Inland DistrictDocument12 pagesWWW - Mycourses.co - Za: or Tambo Inland DistrictShaun LebepeNo ratings yet
- Questions On Liapunov's Stability AnalysisDocument9 pagesQuestions On Liapunov's Stability Analysiskibrom atsbha50% (2)
- QB BMS-311302 - Sem-I Ut-2 111223Document3 pagesQB BMS-311302 - Sem-I Ut-2 111223pagareaaryan.2007No ratings yet
- Mat 211 Cheat SheetDocument6 pagesMat 211 Cheat SheetGarrett KnappNo ratings yet
- Virtual Lab Report Vectors and Scalars Guide Two Astronauts On ADocument8 pagesVirtual Lab Report Vectors and Scalars Guide Two Astronauts On ALevi AckermannNo ratings yet
- Geomanist SpecimenDocument12 pagesGeomanist SpecimenAdal2No ratings yet
- Chap 2 1 Double IntegralDocument30 pagesChap 2 1 Double IntegralTharshini SuriyakumarNo ratings yet
- E Commerce-ResearchDocument11 pagesE Commerce-ResearchAna MariaNo ratings yet
- BucketDocument3 pagesBucketHector Saul Alonso GuadalupeNo ratings yet
- CL Relationships Matter SeDocument16 pagesCL Relationships Matter Seapi-261894355No ratings yet
- Modul 3 - Persamaan Kuadratik 1Document5 pagesModul 3 - Persamaan Kuadratik 1Johari FikriNo ratings yet
- Bhavesh Krishan Garg Cse2b-G1 (Octave Lab-03)Document13 pagesBhavesh Krishan Garg Cse2b-G1 (Octave Lab-03)Bhavesh GargNo ratings yet
- 2002 New Heuristics For One-Dimensional Bin-PackingDocument19 pages2002 New Heuristics For One-Dimensional Bin-Packingaegr82No ratings yet
- Mathematical Languange and SymbolsDocument20 pagesMathematical Languange and SymbolsLimzel MañagoNo ratings yet
- Ap Ab 1Document31 pagesAp Ab 1Mohammed AbdallahNo ratings yet
- Report Business MathematicsDocument22 pagesReport Business MathematicssdfdsfNo ratings yet
- Precalculus Final Exam A PDFDocument13 pagesPrecalculus Final Exam A PDFMelissa OrozcoNo ratings yet
- Time Domain Representation of Linear Time Invariant (LTI) SystemsDocument54 pagesTime Domain Representation of Linear Time Invariant (LTI) SystemsJazmi MukhtarNo ratings yet
- Contemporary Pre Calculus Textbook PDFDocument1,095 pagesContemporary Pre Calculus Textbook PDFchenzhehuahotmail.com100% (5)
- 335 1Document18 pages335 1Mike LinNo ratings yet
- 1 Small Angle FormulaDocument5 pages1 Small Angle Formulasamsul bahriNo ratings yet
- Algorithmic Specified Complexity in The Game of LifeDocument11 pagesAlgorithmic Specified Complexity in The Game of LifeLelieth Martin CastroNo ratings yet