You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- PV Plant ControlDocument19 pagesPV Plant Controlhumberto ceballosNo ratings yet
- Solar Irrigation System Using Brush Less DC Motor: Renu Singh, Ahmed Sharique Anees, Devang TyagiDocument5 pagesSolar Irrigation System Using Brush Less DC Motor: Renu Singh, Ahmed Sharique Anees, Devang TyagiEdamEdamNo ratings yet
- Break-Even Point Analysis GuideDocument15 pagesBreak-Even Point Analysis GuideEdamEdamNo ratings yet
- MCME-R1O09 - Modelling and Control of Electrical MachinesDocument6 pagesMCME-R1O09 - Modelling and Control of Electrical MachinesEdamEdamNo ratings yet
- 26 Suitability PDFDocument7 pages26 Suitability PDFEdamEdamNo ratings yet
- Electrical Presentation SBCC 2016Document58 pagesElectrical Presentation SBCC 2016EdamEdamNo ratings yet
- Semiconductors 170506180045Document42 pagesSemiconductors 170506180045EdamEdamNo ratings yet
- Solar Irrigation System Using Brush Less DC Motor: Renu Singh, Ahmed Sharique Anees, Devang TyagiDocument5 pagesSolar Irrigation System Using Brush Less DC Motor: Renu Singh, Ahmed Sharique Anees, Devang TyagiEdamEdamNo ratings yet
- 26 SuitabilityDocument7 pages26 SuitabilityEdamEdamNo ratings yet
- Pump ApplicationsDocument7 pagesPump ApplicationsEdamEdamNo ratings yet
- Introduction To Management - 140302Document43 pagesIntroduction To Management - 140302EdamEdamNo ratings yet
- Applied SciencesDocument18 pagesApplied SciencesEdamEdamNo ratings yet
- 125 Report PDFDocument76 pages125 Report PDFEdamEdamNo ratings yet
- Solar Irrigation System Using Brush Less DC Motor: Renu Singh, Ahmed Sharique Anees, Devang TyagiDocument5 pagesSolar Irrigation System Using Brush Less DC Motor: Renu Singh, Ahmed Sharique Anees, Devang TyagiEdamEdamNo ratings yet
- Micro-Hydro Power Generation For Unattended Ground SensorsDocument21 pagesMicro-Hydro Power Generation For Unattended Ground SensorsEdamEdamNo ratings yet
- GE404 Topic 1 Introduction EMDocument27 pagesGE404 Topic 1 Introduction EMEdamEdamNo ratings yet
- 5b - OrganizingDocument86 pages5b - OrganizingJoy DimaanoNo ratings yet
- Pspice TutorialDocument56 pagesPspice TutorialCutie0% (1)
- IRENA - Tech - Brief - RE - For Shipping - 2015 PDFDocument60 pagesIRENA - Tech - Brief - RE - For Shipping - 2015 PDFEdamEdamNo ratings yet
- JTTs20120200004 30984455 PDFDocument6 pagesJTTs20120200004 30984455 PDFEdamEdamNo ratings yet
- Important of CroDocument109 pagesImportant of CronandhakumarmeNo ratings yet
- Break Even-Analysis: By, Abhilash.k Pgdm-A P11103Document17 pagesBreak Even-Analysis: By, Abhilash.k Pgdm-A P11103Abhilash KallayilNo ratings yet
- Circuits Lab Exp 9&10 ReportDocument27 pagesCircuits Lab Exp 9&10 ReportEdamEdamNo ratings yet
- Circuits Lab Exp 8 ReportDocument25 pagesCircuits Lab Exp 8 ReportEdamEdamNo ratings yet
- Circuits Lab Exp 7 ReportDocument14 pagesCircuits Lab Exp 7 ReportEdamEdamNo ratings yet
- Circuits Lab Exp 6 ReportDocument24 pagesCircuits Lab Exp 6 ReportAniqNo ratings yet
- Circuits Lab Exp 5 ReportDocument17 pagesCircuits Lab Exp 5 Reportਰਣਜੀਤ ਢਿੱਲੋਂNo ratings yet
- Circuits Lab Exp 1 ReportDocument13 pagesCircuits Lab Exp 1 ReportEdamEdamNo ratings yet
- Ohm's Law Lab ExperimentDocument15 pagesOhm's Law Lab ExperimentEdamEdamNo ratings yet
- An Investigation On The Power System Stability of Photovoltaic Grid Integrated SystemDocument4 pagesAn Investigation On The Power System Stability of Photovoltaic Grid Integrated SystemaeaNo ratings yet
- Installation Manual: UL Version IEC VersionDocument11 pagesInstallation Manual: UL Version IEC VersionNarasimha DvlNo ratings yet
- As Solar 525-550w Mono Tier 1Document2 pagesAs Solar 525-550w Mono Tier 1Alaa ENo ratings yet
- Presentation On: "Dual Axis Solar Tracker"Document29 pagesPresentation On: "Dual Axis Solar Tracker"Arshika IrramNo ratings yet
- Solar Energy Fact SheetDocument4 pagesSolar Energy Fact SheetHossam Al-Dein Mostafa HelmyNo ratings yet
- Csi 250k t800 Abnt ReportDocument26 pagesCsi 250k t800 Abnt ReportmatNo ratings yet
- Inverter @1500KW SpecsDocument90 pagesInverter @1500KW SpecsJayjay Famadico IcawaloNo ratings yet
- Exploring Solar Energy Student Guide (Seven Activities)Document17 pagesExploring Solar Energy Student Guide (Seven Activities)James KazoobaNo ratings yet
- Marco Castillo 8kw HybridDocument3 pagesMarco Castillo 8kw HybridArlie SantosNo ratings yet
- PVTRIN Training Course: Troubleshooting GuideDocument20 pagesPVTRIN Training Course: Troubleshooting GuideBeni Saputra100% (1)
- Automatic Solar Photovoltic Panel Cleaning: Project Proposal COURSE CODE: 9210-01-139Document5 pagesAutomatic Solar Photovoltic Panel Cleaning: Project Proposal COURSE CODE: 9210-01-139Logan KrishNo ratings yet
- Environment Assesment Impact Report Feb-16 KSPDCLDocument66 pagesEnvironment Assesment Impact Report Feb-16 KSPDCLKaladorNo ratings yet
- ICTSD Standards in The Solar Photovoltaic Value Chain - FinalDocument100 pagesICTSD Standards in The Solar Photovoltaic Value Chain - FinalSellappan MuthusamyNo ratings yet
- Internship Report On Solar ProjectDocument29 pagesInternship Report On Solar ProjectSk.Abdul NaveedNo ratings yet
- Módulo Vertex DEG21C.20 EN 2021 A DEG21C.20 2021A EN 20210309Document2 pagesMódulo Vertex DEG21C.20 EN 2021 A DEG21C.20 2021A EN 20210309AGS ENGENHARIA E CONSTRUÇÃONo ratings yet
- 02 WholeDocument281 pages02 Wholegedeus8072No ratings yet
- Conference TemplateDocument22 pagesConference Template2K19/ME/186 RAKSHIT GUPTANo ratings yet
- Calculations of Solar Energy OutputDocument9 pagesCalculations of Solar Energy OutputHectorDavidPreciadoValenzuelaNo ratings yet
- Fuel Cell and Solar Power Based Hybrid Electric Vehicle-1Document14 pagesFuel Cell and Solar Power Based Hybrid Electric Vehicle-120EEE24 Balaji kanna MNo ratings yet
- Cigdem Avci-Karatas EurasianSciEnTech2020Document11 pagesCigdem Avci-Karatas EurasianSciEnTech2020khabiranNo ratings yet
- The Study On The SWOT Analysis of Solar Energy in EthiopiaDocument5 pagesThe Study On The SWOT Analysis of Solar Energy in Ethiopiaasratabate2014No ratings yet
- Photovoltaic Product Catalog of Qingdao Dingyejunhong Energy Technology-New20230303Document40 pagesPhotovoltaic Product Catalog of Qingdao Dingyejunhong Energy Technology-New20230303Angel MoreraNo ratings yet
- Photovoltaic Synchronous Generator - Architecture and Control Strategy For A Grid - Forming PV Energy System PDFDocument12 pagesPhotovoltaic Synchronous Generator - Architecture and Control Strategy For A Grid - Forming PV Energy System PDFsandip mishraNo ratings yet
- Net Zero Energy BuildingDocument13 pagesNet Zero Energy BuildingDanicaGanNo ratings yet
- Smart Technologies and Urban Life A Behavioral and Social PerspectiveDocument4 pagesSmart Technologies and Urban Life A Behavioral and Social PerspectiveDeyvid AlmonacidNo ratings yet
- PV Cycle: Implementing A Voluntary Take-Back and Recycling Scheme For Eol PV ModulesDocument29 pagesPV Cycle: Implementing A Voluntary Take-Back and Recycling Scheme For Eol PV ModulesbalengoneNo ratings yet
- PREFLEXMS DEL D4.1 Weather Forecast Requirements and Evaluation Methods v2 20160729Document46 pagesPREFLEXMS DEL D4.1 Weather Forecast Requirements and Evaluation Methods v2 20160729Mfleh MflehNo ratings yet
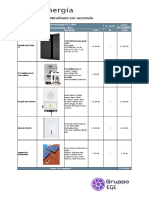
- Listino Kit Genus 1Document1 pageListino Kit Genus 1api-677225196No ratings yet
- Solar Panel Maintenance Checklist PV PDFDocument4 pagesSolar Panel Maintenance Checklist PV PDFzatkbgfebnjolcvruvNo ratings yet