You might also like
- EJEMPLO PROYECTO DE GRADO - CompletoDocument19 pagesEJEMPLO PROYECTO DE GRADO - CompletoHenry Verdezoto100% (1)
- Bobina de TeslaDocument4 pagesBobina de TeslaJorge JimenezNo ratings yet
- Solucion Al Examen SemestralDocument5 pagesSolucion Al Examen SemestralGustavo BautistaNo ratings yet
- Importacia de Seguridad SocialDocument2 pagesImportacia de Seguridad SocialDiego Aquieta RiveraNo ratings yet
- Central PucaraDocument5 pagesCentral PucaraDiego Aquieta RiveraNo ratings yet
- Formato de Encuesta YadiraDocument4 pagesFormato de Encuesta YadiraDiego Aquieta RiveraNo ratings yet
- Actividades de Estimulacion FonéticaDocument3 pagesActividades de Estimulacion FonéticaDiego Aquieta RiveraNo ratings yet
- Proyecto Integrador IDocument27 pagesProyecto Integrador IDiego Aquieta RiveraNo ratings yet
- Componentes Eléctricos y Electrónicos BásicosDocument4 pagesComponentes Eléctricos y Electrónicos BásicosArturo Hansel Garcia Tapia100% (1)
- Instalacion ElectricaDocument32 pagesInstalacion ElectricaLuis Ernesto Vásquez ValverdeNo ratings yet
- LámparaDocument8 pagesLámparaagrotecnicasdelosllanossasNo ratings yet
- 1 TallerDocument8 pages1 TallerEstiben BeltranNo ratings yet
- T153Document292 pagesT153Tovar ArmandoNo ratings yet
- Plan de Seguimiento Hidalgo 1 SemanaDocument3 pagesPlan de Seguimiento Hidalgo 1 SemanaMIGUEL HIDALGONo ratings yet
- Fallos en Los Actuadores de Un VehículoDocument4 pagesFallos en Los Actuadores de Un Vehículoruiz frank rodriguez herreraNo ratings yet
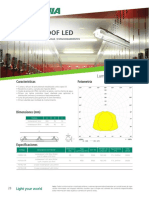
- Hermética 2 18wDocument1 pageHermética 2 18wDavid FernándezNo ratings yet
- Pararrayos - TorretelDocument7 pagesPararrayos - TorretelrvsaNo ratings yet
- Laboratorio 05 - Sensores de Peso y Fuerza-Gripo03Document10 pagesLaboratorio 05 - Sensores de Peso y Fuerza-Gripo03Jose Alonso DongoNo ratings yet
- HI 800 513 ES HIMatrix F35 03 1124Document64 pagesHI 800 513 ES HIMatrix F35 03 1124pablo lazarteNo ratings yet
- Sistema Eléctrico de Potencia MexicanaDocument6 pagesSistema Eléctrico de Potencia MexicanaCristian Emanuel Roman LopezNo ratings yet
- Propiedades Electricas, Magneticas y Termicas Ciencia e Ingenieria de Los MaterialesDocument9 pagesPropiedades Electricas, Magneticas y Termicas Ciencia e Ingenieria de Los MaterialesHector Ivan Miranda MontoyaNo ratings yet
- Manual Instrucciones Speedrive v2Document25 pagesManual Instrucciones Speedrive v2fernando mora de la vegaNo ratings yet
- GuiaCHIRP1 0 PDFDocument8 pagesGuiaCHIRP1 0 PDFCarlos RománNo ratings yet
- Cronologia de TiempoDocument11 pagesCronologia de TiempoFermin CorpNo ratings yet
- MA-DIS-DI-TR01-03 Locales para Subestaciones y Puestos de Conexión y Medida Modulares NormalizadosDocument26 pagesMA-DIS-DI-TR01-03 Locales para Subestaciones y Puestos de Conexión y Medida Modulares NormalizadosSilviaMartinezNo ratings yet
- 168 Lista - Chequeo - Instalaciones - Electricas - ProvisionalesDocument3 pages168 Lista - Chequeo - Instalaciones - Electricas - ProvisionalesyennyNo ratings yet
- HT - Talrob - Semana 01Document3 pagesHT - Talrob - Semana 01lesly chNo ratings yet
- Manual de Equipos de Aire Acondicionado Tipo CasseteDocument50 pagesManual de Equipos de Aire Acondicionado Tipo CasseteDANYBOYYY100% (1)
- 1-Pliego Tarifario 2009 A 2016 (Derogado)Document8 pages1-Pliego Tarifario 2009 A 2016 (Derogado)Denis LedezmaNo ratings yet
- Cap 8Document11 pagesCap 8Jaime Eduardo Alvarez Baron0% (1)
- Instructivo AlarmaDocument21 pagesInstructivo AlarmaAldo EstradaNo ratings yet
- Mecatronica G.centeno 4ta - PracticaDocument10 pagesMecatronica G.centeno 4ta - PracticaGustavo CentenoNo ratings yet
- Laboratorio - 2 - Líneas de Transmisión y Antenas 202108Document3 pagesLaboratorio - 2 - Líneas de Transmisión y Antenas 202108Alex AtencioNo ratings yet
- Motores y GeneradoresDocument10 pagesMotores y GeneradoresRichar MoreloNo ratings yet
- Dac AdcDocument36 pagesDac AdcRas SoldierNo ratings yet