You might also like
- Power VSIDocument2 pagesPower VSIsrikaanth06No ratings yet
- Control Systems Lab ExperimentsDocument3 pagesControl Systems Lab Experimentssrikaanth06No ratings yet
- A New Topology For Unipolar Brushless DC Motor DriveDocument55 pagesA New Topology For Unipolar Brushless DC Motor Drivesrikaanth06No ratings yet
- AC Voltage Controllers-1Document6 pagesAC Voltage Controllers-1srikaanth06No ratings yet
- Part ADocument5 pagesPart Asrikaanth06No ratings yet
- Static V-I Characteristics of A ThyristorDocument3 pagesStatic V-I Characteristics of A Thyristorsrikaanth06No ratings yet
- Two Existing Inverter Topologies for HEVs and EVs ComparedDocument2 pagesTwo Existing Inverter Topologies for HEVs and EVs Comparedsrikaanth06No ratings yet
- Power Electronics and Advanced Electrical Drives Lab - 1Document1 pagePower Electronics and Advanced Electrical Drives Lab - 1srikaanth06No ratings yet
- Force in Magnetic FieldsDocument3 pagesForce in Magnetic Fieldssrikaanth06No ratings yet
- Single Ended Primary Inductance Converter (Sepic) : DVG VDocument3 pagesSingle Ended Primary Inductance Converter (Sepic) : DVG Vsrikaanth06No ratings yet
- LOAD FREQUENCY CONTROL KEEPS GRID STABLEDocument5 pagesLOAD FREQUENCY CONTROL KEEPS GRID STABLEsrikaanth06100% (2)
- Generator Load ModelDocument3 pagesGenerator Load Modelsrikaanth06No ratings yet
- Mosfet Part1Document4 pagesMosfet Part1srikaanth06No ratings yet
- Mosfet Part2Document3 pagesMosfet Part2srikaanth06No ratings yet
- Reactive Power of Star and Delta Connected Balanced LoadsDocument3 pagesReactive Power of Star and Delta Connected Balanced Loadssrikaanth06No ratings yet
- Unit-I Assignment Sub:Power Electronics Class: Iiird B.Tech-I Sem Part-ADocument3 pagesUnit-I Assignment Sub:Power Electronics Class: Iiird B.Tech-I Sem Part-Asrikaanth06No ratings yet
- New Microsoft Office Word DocumentDocument2 pagesNew Microsoft Office Word Documentsrikaanth06No ratings yet
- Pe Unit2Document2 pagesPe Unit2srikaanth06No ratings yet
- LFB Radial Distribution Power Flow Model Section - 1Document2 pagesLFB Radial Distribution Power Flow Model Section - 1srikaanth06No ratings yet
- Off 1Document1 pageOff 1srikaanth06No ratings yet
- LFC Modelling Part 1Document1 pageLFC Modelling Part 1srikaanth06No ratings yet
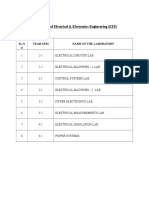
- EEE Department Lab ListingDocument1 pageEEE Department Lab Listingsrikaanth06No ratings yet
- LFC Introduction Part 2Document1 pageLFC Introduction Part 2srikaanth06No ratings yet
- LFC Modelling Part 3Document1 pageLFC Modelling Part 3srikaanth06No ratings yet
- LFC Introduction Part 3Document2 pagesLFC Introduction Part 3srikaanth06No ratings yet
- PsocDocument1 pagePsocsrikaanth06No ratings yet
- Fig.2.2 Turbine Speed Governing SystemDocument3 pagesFig.2.2 Turbine Speed Governing Systemsrikaanth06No ratings yet
- LFC Introduction Part 1Document4 pagesLFC Introduction Part 1srikaanth06No ratings yet
- LFC AbstractDocument1 pageLFC Abstractsrikaanth06No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Aspen Hysys Worked ExampleDocument33 pagesAspen Hysys Worked ExampleEvans IraborNo ratings yet
- Lpi - 101-500Document6 pagesLpi - 101-500Jon0% (1)
- PESTEL Team Project (Group)Document9 pagesPESTEL Team Project (Group)Yadira Alvarado saavedraNo ratings yet
- Critical Thinking Portfolio AssignmentDocument8 pagesCritical Thinking Portfolio Assignmentapi-334295481No ratings yet
- Signal Sampling, Quantization, Binary Encoding: Oleh Albert SagalaDocument46 pagesSignal Sampling, Quantization, Binary Encoding: Oleh Albert SagalaRamos D HutabalianNo ratings yet
- I. Introduction To Project Report:: Banking MarketingDocument5 pagesI. Introduction To Project Report:: Banking MarketingGoutham BindigaNo ratings yet
- CHRM - A01.QXD - Unknown - 3071 PDFDocument545 pagesCHRM - A01.QXD - Unknown - 3071 PDFbeaudecoupe100% (2)
- Data Pre Processing in WEKADocument5 pagesData Pre Processing in WEKAPrashant SunejaNo ratings yet
- U.S. Copyright Renewals, 1962 January - June by U.S. Copyright OfficeDocument471 pagesU.S. Copyright Renewals, 1962 January - June by U.S. Copyright OfficeGutenberg.orgNo ratings yet
- Cloud Computing Vs Traditional ITDocument20 pagesCloud Computing Vs Traditional ITgarata_java100% (1)
- Basics of Excellence Service in The Hotel, Restaurant, and Catering IndustryDocument43 pagesBasics of Excellence Service in The Hotel, Restaurant, and Catering IndustryTrinitaaNo ratings yet
- Galletto 1250 User GuideDocument9 pagesGalletto 1250 User Guidesimcsimc1No ratings yet
- SWR SRB Product SheetDocument2 pagesSWR SRB Product SheetCarlo AguiluzNo ratings yet
- ASVAB Arithmetic Reasoning Practice Test 1Document7 pagesASVAB Arithmetic Reasoning Practice Test 1ASVABTestBank100% (2)
- Solution To Information TheoryDocument164 pagesSolution To Information Theorynbj_133% (3)
- Ranking Hospital - Do We Gain Reliability by Using Composite Rather Than Individual Indicators?Document9 pagesRanking Hospital - Do We Gain Reliability by Using Composite Rather Than Individual Indicators?Robert CoffinNo ratings yet
- JCL RefresherDocument50 pagesJCL RefresherCosta48100% (1)
- Fisica Básica 3er Año SantillanaDocument66 pagesFisica Básica 3er Año SantillanaElifrnak91% (22)
- Thermodynamics - Lectures b4 MidsemDocument545 pagesThermodynamics - Lectures b4 MidsemVismit Parihar100% (1)
- Qdoc - Tips Select Readings 2nd Pre IntermediateDocument178 pagesQdoc - Tips Select Readings 2nd Pre IntermediateFarzana BatoolNo ratings yet
- Accomplishment in ScinceDocument21 pagesAccomplishment in ScinceChristine CanoyNo ratings yet
- Nikbakht H. EFL Pronunciation Teaching - A Theoretical Review.Document30 pagesNikbakht H. EFL Pronunciation Teaching - A Theoretical Review.researchdomain100% (1)
- Constructed Wetland Design Guidelines for DevelopersDocument32 pagesConstructed Wetland Design Guidelines for DevelopersBere QuintosNo ratings yet
- RSBACDocument166 pagesRSBACtradersanNo ratings yet
- Difference Between Defect, Error, Bug, Failure and FaultDocument28 pagesDifference Between Defect, Error, Bug, Failure and FaultbhojanNo ratings yet
- English Language and Applied Linguistics Textbooks Lo Res USDDocument61 pagesEnglish Language and Applied Linguistics Textbooks Lo Res USDJames Blackburn Quéré Cutbirth100% (2)
- Tusculum College Catalog 2011-2012Document187 pagesTusculum College Catalog 2011-2012Tusculum CollegeNo ratings yet
- What Is A Political SubjectDocument7 pagesWhat Is A Political SubjectlukaNo ratings yet
- Implementing IPC Java User Exit To Enable Calculation of EMIDocument27 pagesImplementing IPC Java User Exit To Enable Calculation of EMIArun SinghNo ratings yet
- Work From Home Policy LeadsquaredDocument5 pagesWork From Home Policy LeadsquaredAnthonyNo ratings yet