You might also like
- Facts Principles MethodsDocument27 pagesFacts Principles MethodsTanvir Shahrier MahmudNo ratings yet
- Roark's Formula 0 22Document1 pageRoark's Formula 0 22Jay CeeNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Principal stresses and maximum shearDocument13 pagesPrincipal stresses and maximum shearSathish SelvaNo ratings yet
- Stress, Strain, and Constitutive RelationsDocument23 pagesStress, Strain, and Constitutive RelationsMekro Permana PinemNo ratings yet
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- Lectuer 1 Complex Stresses PDFDocument20 pagesLectuer 1 Complex Stresses PDFadel swar100% (1)
- Principle Stresses & StrainsDocument35 pagesPrinciple Stresses & StrainskalpanaadhiNo ratings yet
- 1 - Load and Stress AnalysisDocument27 pages1 - Load and Stress AnalysisAyesha KhanNo ratings yet
- Stress-Strain and Soil StrengthDocument17 pagesStress-Strain and Soil StrengthFirsty Liliani LestariNo ratings yet
- Principles of MechanicsDocument29 pagesPrinciples of MechanicsengrasheedNo ratings yet
- 17.lecture 27 Finite Element Derivation PDFDocument17 pages17.lecture 27 Finite Element Derivation PDFKarina NaudéNo ratings yet
- Lecture 3Document15 pagesLecture 3ansgcekNo ratings yet
- State of Stresses and Compound Stresses ExplainedDocument19 pagesState of Stresses and Compound Stresses ExplainedHarun HodžićNo ratings yet
- Roark's Formula 0 19Document1 pageRoark's Formula 0 19Jay CeeNo ratings yet
- Stresses: 2.1 General TheoryDocument25 pagesStresses: 2.1 General TheoryLocoo Goku YoshiiNo ratings yet
- Analysis of Stersses: General State of Stress at A PointDocument8 pagesAnalysis of Stersses: General State of Stress at A Pointpmm05479No ratings yet
- Roark's Formula 0 20Document1 pageRoark's Formula 0 20Jay CeeNo ratings yet
- 2 Metal Forming 1 & 2Document28 pages2 Metal Forming 1 & 2mameNo ratings yet
- Transformation of Plane Stress and Strain PDFDocument14 pagesTransformation of Plane Stress and Strain PDFFitsum OmituNo ratings yet
- chapter 2Document49 pageschapter 2nitingautam1907No ratings yet
- NOTES Stress Strain STUDENTDocument5 pagesNOTES Stress Strain STUDENTAntonio MateosNo ratings yet
- Theory of Stress: Main PlayerDocument9 pagesTheory of Stress: Main Playerxaaabbb_550464353No ratings yet
- 3 - Stress TensorDocument23 pages3 - Stress TensorRishan Joshua DsilvaNo ratings yet
- ME 569 Stress and Strain RelationshipsDocument52 pagesME 569 Stress and Strain RelationshipsعلىالمهندسNo ratings yet
- in This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureDocument35 pagesin This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureKanti SolankiNo ratings yet
- CH 01 Simple Stresses and Strains VG 24Document40 pagesCH 01 Simple Stresses and Strains VG 24Sivani SinghNo ratings yet
- Fatigue Analysis of Combined Stress Systems: Ax, Ay A Y Op Opx, Opy Op Z Op OpxDocument2 pagesFatigue Analysis of Combined Stress Systems: Ax, Ay A Y Op Opx, Opy Op Z Op OpxVinicius Mastelaro RodriguesNo ratings yet
- Theory of Elasticity and Plasticity-RizwanDocument34 pagesTheory of Elasticity and Plasticity-RizwanMISBAH UL HAQUENo ratings yet
- 101 PDFDocument21 pages101 PDFThaung Myint OoNo ratings yet
- Analysis of Stersses General State of Stress at A Point:: X XX XDocument8 pagesAnalysis of Stersses General State of Stress at A Point:: X XX XMuhammed SulfeekNo ratings yet
- Mechanical Engineering Stress AnalysisDocument46 pagesMechanical Engineering Stress AnalysisAudrey TuNo ratings yet
- Chapter 2-1Document52 pagesChapter 2-1sakshi.shahani02No ratings yet
- Chap 1. Stress-Strain AnalysisDocument36 pagesChap 1. Stress-Strain Analysisteknikpembakaran2013No ratings yet
- Cap 01Document33 pagesCap 01figueiredo0115740% (1)
- Stress and StrainDocument17 pagesStress and StrainakshatbhargavaNo ratings yet
- Plane Stress and Strain Analysis in Solid MechanicsDocument8 pagesPlane Stress and Strain Analysis in Solid MechanicskingstonNo ratings yet
- Concepts of Stress and Strain: P Stress at A PointDocument21 pagesConcepts of Stress and Strain: P Stress at A PointNarendra ChavdaNo ratings yet
- ME2112 - (Part 1) - 2D Stress and StrainDocument46 pagesME2112 - (Part 1) - 2D Stress and StraindinodanoNo ratings yet
- TOE BasiscsDocument20 pagesTOE BasiscsYogesh BiyaniNo ratings yet
- MM 312 Solid Mechanics 2 Chapter 1 (Part 1) : Presented By: Dr. Farid Mahboubi NasrekaniDocument41 pagesMM 312 Solid Mechanics 2 Chapter 1 (Part 1) : Presented By: Dr. Farid Mahboubi NasrekaniMohammed IbrahimNo ratings yet
- Unit 5 Principal Stresses and Strains: StructureDocument32 pagesUnit 5 Principal Stresses and Strains: StructureHarlen MuntheNo ratings yet
- 1 Review Stresses Pages2Document16 pages1 Review Stresses Pages2quockhanh310No ratings yet
- The Equilibrium EquationsDocument6 pagesThe Equilibrium EquationsJoão DiasNo ratings yet
- Brief Introduction To Continuum Mechanics (Deviatoric Stress and Strain)Document33 pagesBrief Introduction To Continuum Mechanics (Deviatoric Stress and Strain)masoodkamalNo ratings yet
- Navier Stokes EquationDocument26 pagesNavier Stokes EquationHina MeoNo ratings yet
- Strong and Weak Forms For One-Dimensional Problems: A First Course in Finite Elements J. Fish and T. BelytschkoDocument6 pagesStrong and Weak Forms For One-Dimensional Problems: A First Course in Finite Elements J. Fish and T. BelytschkoSahab HafeezNo ratings yet
- CE2112 Concepts of Stresses and Strains - 08082019Document26 pagesCE2112 Concepts of Stresses and Strains - 08082019Chen JianxiongNo ratings yet
- Load and Stress Analysis: 3.1 Equilibrium and Free-Body DiagramsDocument35 pagesLoad and Stress Analysis: 3.1 Equilibrium and Free-Body DiagramsAditya DandekarNo ratings yet
- Elasticity Theory BasisDocument9 pagesElasticity Theory BasisGiovanni Morais TeixeiraNo ratings yet
- CEng 6501 ToE (Chapter 2)Document20 pagesCEng 6501 ToE (Chapter 2)Fowzi MohammedNo ratings yet
- CEng 6501 ToE (Chapter 2)Document20 pagesCEng 6501 ToE (Chapter 2)Fowzi MohammedNo ratings yet
- 2) Stress Analysis 2Document30 pages2) Stress Analysis 2Dennis Padec BwochengoNo ratings yet
- Gusset DrawingsDocument59 pagesGusset DrawingssivaNo ratings yet
- 2 - Stresses, Strains, and ElasticityDocument14 pages2 - Stresses, Strains, and ElasticitySofi Ramírez RivasNo ratings yet
- 1.objective: What's A Strain Gauge Used For?Document12 pages1.objective: What's A Strain Gauge Used For?Aman kumarNo ratings yet
- Lecture 06 Traction Vector Stress TensorDocument12 pagesLecture 06 Traction Vector Stress TensorManoj MallickNo ratings yet
- Intake Tower Existing DamDocument3 pagesIntake Tower Existing DamBunkun15No ratings yet
- How To Construct A Concrete Swimming Pool - (PDF) - The ConstructorDocument13 pagesHow To Construct A Concrete Swimming Pool - (PDF) - The ConstructorBunkun15No ratings yet
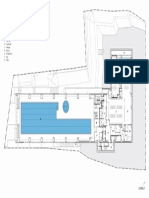
- Swimming Pool Site PlanDocument1 pageSwimming Pool Site PlanBunkun15No ratings yet
- Swimming Pool Sample LayoutsDocument1 pageSwimming Pool Sample LayoutsBunkun15No ratings yet
- Checklist ResPoolsDocument7 pagesChecklist ResPoolsBunkun15No ratings yet
- Industrial BuildingsDocument2 pagesIndustrial BuildingsBunkun15No ratings yet
- Basic Requirements in Swimming Pool Construction - The ConstructorDocument10 pagesBasic Requirements in Swimming Pool Construction - The ConstructorBunkun15No ratings yet
- Guide To Standards-Pools and SpasDocument15 pagesGuide To Standards-Pools and SpasMIguel HazNo ratings yet
- Design and Construction of Swimming Pools-Ib-P-Bc2017 014Document10 pagesDesign and Construction of Swimming Pools-Ib-P-Bc2017 014Luffy11No ratings yet
- Title - Section 6-1.29 - Swimming Pool Design Standards - New York Codes, Rules and RegulationsDocument24 pagesTitle - Section 6-1.29 - Swimming Pool Design Standards - New York Codes, Rules and RegulationsBunkun15No ratings yet
- Swimming Pool Details Structures SampleDocument1 pageSwimming Pool Details Structures SampleBunkun15100% (3)
- Swimming Pool Roofing OptionsDocument2 pagesSwimming Pool Roofing OptionsBunkun15100% (1)
- HotelsDocument2 pagesHotelsBunkun15No ratings yet
- Swimming Pool & Spa Safety: PurposeDocument12 pagesSwimming Pool & Spa Safety: PurposekenNo ratings yet
- CommercialDocument3 pagesCommercialBunkun15No ratings yet
- EducationDocument3 pagesEducationBunkun15No ratings yet
- Designing Resilient HomesDocument2 pagesDesigning Resilient HomesBunkun15No ratings yet
- HealthcareDocument3 pagesHealthcareBunkun15No ratings yet
- Basements For HousingDocument2 pagesBasements For HousingBunkun15No ratings yet
- Residential - Low-RiseDocument4 pagesResidential - Low-RiseBunkun15No ratings yet
- Pc-I (Infrastructure-Proforma For Development Projects)Document12 pagesPc-I (Infrastructure-Proforma For Development Projects)Haider IqbalNo ratings yet
- Starting A Bookstore BusinessDocument11 pagesStarting A Bookstore BusinessBunkun15No ratings yet
- Anchorage Detail of Column at Top FloorDocument5 pagesAnchorage Detail of Column at Top FloorBunkun15No ratings yet
- How To Start A Bookstore BusinessDocument5 pagesHow To Start A Bookstore BusinessBunkun15No ratings yet
- Stable Sprayed ConcreteDocument2 pagesStable Sprayed ConcreteBunkun15No ratings yet
- Unifrom Load Partially Distributed at Left EndDocument1 pageUnifrom Load Partially Distributed at Left EndBunkun15No ratings yet
- 4 Ways To Book PublishingDocument7 pages4 Ways To Book PublishingBunkun15No ratings yet
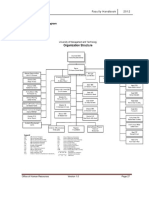
- University OrganogramDocument1 pageUniversity OrganogramBunkun15No ratings yet
- Imperial College of Business Studies Employment Application FormDocument3 pagesImperial College of Business Studies Employment Application FormBunkun15No ratings yet
- ICBS Faculty Positions in Engineering, Business, SciencesDocument1 pageICBS Faculty Positions in Engineering, Business, SciencesBunkun15No ratings yet
- Upvc Project ReportDocument39 pagesUpvc Project ReportRohit KumarNo ratings yet
- Sigmund Freud and His Main TheoriesDocument5 pagesSigmund Freud and His Main TheoriesNguyen HarryNo ratings yet
- Texas Final LeadsDocument36 pagesTexas Final Leadsabdullahmohammed4460No ratings yet
- Evolution of Computers: A Brief HistoryDocument15 pagesEvolution of Computers: A Brief HistoryshinNo ratings yet
- Caring Seedlings TLE Weekly PlanDocument3 pagesCaring Seedlings TLE Weekly PlanMarjorie RaymundoNo ratings yet
- Sensor Guide: Standard Triaxial Geophones Specialty Triaxial Geophones Standard Overpressure MicrophonesDocument1 pageSensor Guide: Standard Triaxial Geophones Specialty Triaxial Geophones Standard Overpressure MicrophonesDennis Elias TaipeNo ratings yet
- God in The Quran A Metaphysical StudyDocument133 pagesGod in The Quran A Metaphysical StudyFaisal Ali Haider LahotiNo ratings yet
- Mineral Processing Course: ThickeningDocument50 pagesMineral Processing Course: ThickeningAdham Elbrawy100% (1)
- Academic Transition To Senior High SchoolDocument30 pagesAcademic Transition To Senior High SchoolGabriel ExalaNo ratings yet
- IC-V80 V80E ManualDocument64 pagesIC-V80 V80E Manualrzkyln100% (1)
- Optimization Module For Abaqus/CAE Based On Genetic AlgorithmDocument1 pageOptimization Module For Abaqus/CAE Based On Genetic AlgorithmSIMULIACorpNo ratings yet
- Computer Vision: Chapter 5. SegmentationDocument16 pagesComputer Vision: Chapter 5. SegmentationThịi ÁnhhNo ratings yet
- Me8072 Renewable Sources of EnergyDocument13 pagesMe8072 Renewable Sources of EnergyNallappan Rajj ANo ratings yet
- HGDocument64 pagesHGCharis PapadopoulosNo ratings yet
- Delhi University SEC Exam Date Sheet March 2023Document2 pagesDelhi University SEC Exam Date Sheet March 2023aamir9ali-42No ratings yet
- Marketing Assignment (Cool Air India)Document10 pagesMarketing Assignment (Cool Air India)Mandira PantNo ratings yet
- 2022 Anambra State ITN Mass Campaign Report in Nnewi North LGA by Idongesit EtukudoDocument15 pages2022 Anambra State ITN Mass Campaign Report in Nnewi North LGA by Idongesit EtukudoIdongesit EtukudoNo ratings yet
- The Champion Legal Ads: 11-02-23Document58 pagesThe Champion Legal Ads: 11-02-23Donna S. SeayNo ratings yet
- TM-1870 AVEVA Everything3D - (2.1) Draw Administration (CN)Document124 pagesTM-1870 AVEVA Everything3D - (2.1) Draw Administration (CN)yuehui niuNo ratings yet
- Aw MD700 Manual G10 150706Document73 pagesAw MD700 Manual G10 150706Heraldo Ulguim Luis OliveiraNo ratings yet
- Facts & Figures of Nepalese HydroDocument11 pagesFacts & Figures of Nepalese Hydromark bingNo ratings yet
- Lesson Plan 2 Sine Rule and Cosine RuleDocument8 pagesLesson Plan 2 Sine Rule and Cosine Ruleapi-280114661No ratings yet
- Toaz - Info Interchange 2 Quiz Units 5 Ampamp 6 Revision Del Intento PRDocument5 pagesToaz - Info Interchange 2 Quiz Units 5 Ampamp 6 Revision Del Intento PRMarco Antonio Gonzalez CastilloNo ratings yet
- Lead Funnels On Funnel Swipe File - TrelloDocument5 pagesLead Funnels On Funnel Swipe File - TrelloKatherie BriersNo ratings yet
- Sist-En-6101-2016 .Document9 pagesSist-En-6101-2016 .lokelooksNo ratings yet
- IBM Release Notes - IBM SPSS Statistics 21.0 - United States PDFDocument3 pagesIBM Release Notes - IBM SPSS Statistics 21.0 - United States PDFraj sharmaNo ratings yet
- 2 Acceleration Questions and AnswersDocument2 pages2 Acceleration Questions and Answersapi-272986951100% (2)
- Basic Facts For Homebooks Stage 7Document3 pagesBasic Facts For Homebooks Stage 7api-311857762No ratings yet
- Kevin Chiu - Solving Procrastination v1.1Document2 pagesKevin Chiu - Solving Procrastination v1.1TêteHauteNo ratings yet
- The Three Waves of Volunteers & The New EarthFrom EverandThe Three Waves of Volunteers & The New EarthRating: 5 out of 5 stars5/5 (179)
- Summary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisFrom EverandSummary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (30)
- It's Easier Than You Think: The Buddhist Way to HappinessFrom EverandIt's Easier Than You Think: The Buddhist Way to HappinessRating: 4 out of 5 stars4/5 (60)
- The Secret Teachings Of All Ages: AN ENCYCLOPEDIC OUTLINE OF MASONIC, HERMETIC, QABBALISTIC AND ROSICRUCIAN SYMBOLICAL PHILOSOPHYFrom EverandThe Secret Teachings Of All Ages: AN ENCYCLOPEDIC OUTLINE OF MASONIC, HERMETIC, QABBALISTIC AND ROSICRUCIAN SYMBOLICAL PHILOSOPHYRating: 4.5 out of 5 stars4.5/5 (4)
- Stoicism: How to Use Stoic Philosophy to Find Inner Peace and HappinessFrom EverandStoicism: How to Use Stoic Philosophy to Find Inner Peace and HappinessRating: 4.5 out of 5 stars4.5/5 (83)
- The Courage to Be Happy: Discover the Power of Positive Psychology and Choose Happiness Every DayFrom EverandThe Courage to Be Happy: Discover the Power of Positive Psychology and Choose Happiness Every DayRating: 4.5 out of 5 stars4.5/5 (215)
- Summary: How to Know a Person: The Art of Seeing Others Deeply and Being Deeply Seen By David Brooks: Key Takeaways, Summary and AnalysisFrom EverandSummary: How to Know a Person: The Art of Seeing Others Deeply and Being Deeply Seen By David Brooks: Key Takeaways, Summary and AnalysisRating: 4 out of 5 stars4/5 (4)
- How to Destroy America in Three Easy StepsFrom EverandHow to Destroy America in Three Easy StepsRating: 4.5 out of 5 stars4.5/5 (21)
- Summary of Man's Search for Meaning by Viktor E. FranklFrom EverandSummary of Man's Search for Meaning by Viktor E. FranklRating: 4.5 out of 5 stars4.5/5 (101)
- The Emperor's Handbook: A New Translation of The MeditationsFrom EverandThe Emperor's Handbook: A New Translation of The MeditationsRating: 5 out of 5 stars5/5 (8)
- The Authoritarian Moment: How the Left Weaponized America's Institutions Against DissentFrom EverandThe Authoritarian Moment: How the Left Weaponized America's Institutions Against DissentRating: 4 out of 5 stars4/5 (17)
- Intuition Pumps and Other Tools for ThinkingFrom EverandIntuition Pumps and Other Tools for ThinkingRating: 3.5 out of 5 stars3.5/5 (148)
- How to Live: 27 conflicting answers and one weird conclusionFrom EverandHow to Live: 27 conflicting answers and one weird conclusionRating: 4.5 out of 5 stars4.5/5 (36)
- Philosophy 101: From Plato and Socrates to Ethics and Metaphysics, an Essential Primer on the History of ThoughtFrom EverandPhilosophy 101: From Plato and Socrates to Ethics and Metaphysics, an Essential Primer on the History of ThoughtRating: 5 out of 5 stars5/5 (8)
- The Mind & The Brain: Neuroplasticity and the Power of Mental ForceFrom EverandThe Mind & The Brain: Neuroplasticity and the Power of Mental ForceNo ratings yet
- How to Be Free: An Ancient Guide to the Stoic LifeFrom EverandHow to Be Free: An Ancient Guide to the Stoic LifeRating: 4.5 out of 5 stars4.5/5 (324)
- Strategy Masters: The Prince, The Art of War, and The Gallic WarsFrom EverandStrategy Masters: The Prince, The Art of War, and The Gallic WarsRating: 4.5 out of 5 stars4.5/5 (3)
- How to Think Like a Roman Emperor: The Stoic Philosophy of Marcus AureliusFrom EverandHow to Think Like a Roman Emperor: The Stoic Philosophy of Marcus AureliusRating: 5 out of 5 stars5/5 (300)