You might also like
- 1111Document45 pages1111Kasahun MekonnenNo ratings yet
- Assignment of Arm RobotDocument7 pagesAssignment of Arm RobotRikko PutraNo ratings yet
- Denavit-Hartenberg Parameters - WikipediaDocument19 pagesDenavit-Hartenberg Parameters - Wikipediavikas16051998No ratings yet
- Forward Kinematics1Document6 pagesForward Kinematics1adireyNo ratings yet
- Rotation and Transformation MatricesDocument56 pagesRotation and Transformation MatricesRam MNo ratings yet
- Chapter 4Document8 pagesChapter 4marifs2002No ratings yet
- 13 - Chapter - 3 - Kinematics of Backhoe PDFDocument36 pages13 - Chapter - 3 - Kinematics of Backhoe PDFKetul ShahNo ratings yet
- Manipulator KinematicsDocument42 pagesManipulator KinematicsKarthikeyanRamanujamNo ratings yet
- Kinematic analysis of plane mechanismsDocument12 pagesKinematic analysis of plane mechanismsEdison PilcoNo ratings yet
- ADMM ClassNotes Unit 1 and 4Document12 pagesADMM ClassNotes Unit 1 and 4Aman SinhaNo ratings yet
- Systems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei RenDocument8 pagesSystems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei Renlahoucine1984No ratings yet
- D-H Representation for Robot KinematicsDocument2 pagesD-H Representation for Robot KinematicsEric PierceNo ratings yet
- Chapter 6, D-H RepresentationDocument24 pagesChapter 6, D-H RepresentationAkram AlsadeqNo ratings yet
- Literature Review On Modelling Approaches To The Kinematics of Robot ManipulatorDocument14 pagesLiterature Review On Modelling Approaches To The Kinematics of Robot ManipulatorAbel ErmiasNo ratings yet
- Tensor Analysis-Chapter 1Document81 pagesTensor Analysis-Chapter 1qftgaugeNo ratings yet
- A Unified Notation For Serial, Parallel, and Hybrid Kinematic StructuresDocument6 pagesA Unified Notation For Serial, Parallel, and Hybrid Kinematic StructuresN Dhanunjaya Rao BorraNo ratings yet
- InTech-Robot Kinematics Forward and Inverse KinematicsDocument32 pagesInTech-Robot Kinematics Forward and Inverse KinematicsPedro DominguesNo ratings yet
- Kinematics of Robots: Alba Perez GraciaDocument15 pagesKinematics of Robots: Alba Perez GraciaLin JiangNo ratings yet
- 42 Ijmperddec201742Document10 pages42 Ijmperddec201742TJPRC PublicationsNo ratings yet
- SSC-Theory of MachineDocument75 pagesSSC-Theory of MachineSteph Dela MujerNo ratings yet
- CH-2 Robot MechanismsDocument22 pagesCH-2 Robot MechanismsArganoNo ratings yet
- D-H Problems PDFDocument9 pagesD-H Problems PDFkrupachariNo ratings yet
- 04 - Local Coordinate SystemDocument18 pages04 - Local Coordinate Systemerikoh100% (2)
- Chap3 Forward KinematicsDocument32 pagesChap3 Forward Kinematicstrynext100% (1)
- Robot KinematicsDocument33 pagesRobot KinematicsengrasheedNo ratings yet
- Different DH ConventionsDocument20 pagesDifferent DH ConventionsomarNo ratings yet
- Chapter 3Document58 pagesChapter 3ketemaNo ratings yet
- Kinematic and Dynamic Accuracy of Spherical MechanismsDocument8 pagesKinematic and Dynamic Accuracy of Spherical MechanismsNguyen QuocNo ratings yet
- Denavit-Hartenberg ParametersDocument6 pagesDenavit-Hartenberg ParametersJavier ReyesNo ratings yet
- Computing Periodic Orbits and Their Bifurcations With Automatic DifferentiationDocument36 pagesComputing Periodic Orbits and Their Bifurcations With Automatic DifferentiationMagno CostaNo ratings yet
- Tomdwdwdqwed RVGRVVDocument14 pagesTomdwdwdqwed RVGRVVBijay KumarNo ratings yet
- Generalized CoordinatesDocument8 pagesGeneralized CoordinatesJoshua WoodNo ratings yet
- Robot DH FKSDocument38 pagesRobot DH FKSengrodeNo ratings yet
- Ma 2000 PDFDocument18 pagesMa 2000 PDFMuhammad ZulfiqarNo ratings yet
- 17M135. CNC. Assignment PresentationDocument10 pages17M135. CNC. Assignment PresentationPraveen KumarNo ratings yet
- De Nav It Hart EnbergDocument2 pagesDe Nav It Hart EnbergCatalin HristeaNo ratings yet
- Design Optimization of Planar Mechanisms: AbstractDocument12 pagesDesign Optimization of Planar Mechanisms: AbstractInternational Journal of Engineering and TechniquesNo ratings yet
- Robotics: Kinematics, Dynamics and Motion Control Module - 5 VITDocument60 pagesRobotics: Kinematics, Dynamics and Motion Control Module - 5 VITHarisankar R N R 21BRS1524No ratings yet
- FK Positioning Chapter Explains Robot JointsDocument23 pagesFK Positioning Chapter Explains Robot Jointsأحمد دعبسNo ratings yet
- Optimum synthesis and animation of spherical four-bar mechanisms using DE algorithm in MathematicaDocument8 pagesOptimum synthesis and animation of spherical four-bar mechanisms using DE algorithm in Mathematicaadan25tulaNo ratings yet
- Ijmet 08 02 002 PDFDocument8 pagesIjmet 08 02 002 PDFalokNo ratings yet
- tmpDF31 TMPDocument15 pagestmpDF31 TMPFrontiersNo ratings yet
- Coordinate SystemDocument14 pagesCoordinate Systemreach_arindomNo ratings yet
- Direct and Inverse Kinematics ExplainedDocument25 pagesDirect and Inverse Kinematics ExplainedMyagmarbayar NerguiNo ratings yet
- Kinmatics Invese CalcuDocument6 pagesKinmatics Invese CalcukinfegetaNo ratings yet
- Theory of StructuresDocument35 pagesTheory of StructurespjNo ratings yet
- Ieee Planting MechanismsDocument4 pagesIeee Planting MechanismsPavan KotrikeNo ratings yet
- Standard Terminology For Vehicle Dynamics SimulationDocument14 pagesStandard Terminology For Vehicle Dynamics SimulationRam Krishan SharmaNo ratings yet
- Mae263a 03Document72 pagesMae263a 03HansNo ratings yet
- Structures Determinacy TheoryDocument35 pagesStructures Determinacy TheoryPatricia Nicole ElediaNo ratings yet
- Synchronization Motion Control For Quad-Cylinder Lift Systems With Acceleration CouplingDocument6 pagesSynchronization Motion Control For Quad-Cylinder Lift Systems With Acceleration Couplingamin342No ratings yet
- A Torque Cancelling System For Quick-Motion Robots: Daigoro IsobeDocument21 pagesA Torque Cancelling System For Quick-Motion Robots: Daigoro IsobeRavi KhandelwalNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- A New Theory in Stiffness Control For Dextrous ManipulationDocument9 pagesA New Theory in Stiffness Control For Dextrous Manipulationcekigad371No ratings yet
- Kinematic Analysis of 5 Dof Lynx ArmDocument6 pagesKinematic Analysis of 5 Dof Lynx ArmsathyaNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Blue Eyes Tech Lets Machines See EmotionsDocument22 pagesBlue Eyes Tech Lets Machines See EmotionsaravindsnistNo ratings yet
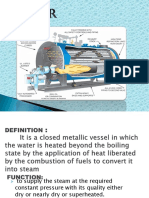
- BoilerDocument16 pagesBoilerSatish HSNo ratings yet
- Fabrication (Metal Joining) : Ravishankar M D 17EME14 Elements of Mechanical EngineeringDocument18 pagesFabrication (Metal Joining) : Ravishankar M D 17EME14 Elements of Mechanical EngineeringSatish HSNo ratings yet
- Environment Within A Car DoorDocument20 pagesEnvironment Within A Car DoorSatish HSNo ratings yet
- Applications of BiofuelsDocument21 pagesApplications of BiofuelsSatish HSNo ratings yet
- H&P Question BankDocument2 pagesH&P Question BankSatish HSNo ratings yet
- Unit 1 IntroductiontohydraulicpowerDocument22 pagesUnit 1 IntroductiontohydraulicpowerSatish HSNo ratings yet
- Final ReportDocument30 pagesFinal ReportSatish HSNo ratings yet
- Mechatronics Unit-2 HSSDocument20 pagesMechatronics Unit-2 HSSSatish HSNo ratings yet
- Mechatronics Unit-1 HSSDocument15 pagesMechatronics Unit-1 HSSSatish HSNo ratings yet
- Recent Advances in Rapid PrototypingDocument15 pagesRecent Advances in Rapid PrototypingSatish HSNo ratings yet
- Coin Sorter111Document23 pagesCoin Sorter111Satish HSNo ratings yet
- UploadedFile 130142895600755379Document23 pagesUploadedFile 130142895600755379Satish HSNo ratings yet
- Industrial Training Seminar: Satish H S 3 Sem M.Tech (CIM) 4PS12MCM12Document27 pagesIndustrial Training Seminar: Satish H S 3 Sem M.Tech (CIM) 4PS12MCM12Satish HSNo ratings yet
- Application of Nitrous Oxide in AutomobilesDocument14 pagesApplication of Nitrous Oxide in AutomobilesmandykapoorNo ratings yet
- Smoke SensorsDocument15 pagesSmoke SensorsSatish HSNo ratings yet
- Application of Nitrous Oxide in AutomobilesDocument20 pagesApplication of Nitrous Oxide in AutomobilesSatish HS100% (1)
- Report - Automated Guided VehicleDocument21 pagesReport - Automated Guided VehicleSatish HSNo ratings yet
- Power Generation From Speed Breaker: by Nitesh RDocument16 pagesPower Generation From Speed Breaker: by Nitesh RSatish HSNo ratings yet
- Automated Guided VehicleDocument21 pagesAutomated Guided VehicleSatish HSNo ratings yet
- ContentsDocument1 pageContentsSatish HSNo ratings yet
- Types and Applications of Automated Guided Vehicles (AGVsDocument2 pagesTypes and Applications of Automated Guided Vehicles (AGVsSatish HSNo ratings yet
- D-H ConvectionDocument20 pagesD-H ConvectionSatish HSNo ratings yet
- Design of Miniature GearboxDocument32 pagesDesign of Miniature GearboxSatish HSNo ratings yet
- 3d Machine Vision System As Shop Floor MetologyDocument22 pages3d Machine Vision System As Shop Floor MetologySatish HSNo ratings yet
- 54 Sou2Document9 pages54 Sou2amr_scorpion_engNo ratings yet
- Power Generation From Speed Breaker: by Nitesh RDocument16 pagesPower Generation From Speed Breaker: by Nitesh RSatish HSNo ratings yet
- Notification KPSC Group A B C Posts - 2 PDFDocument70 pagesNotification KPSC Group A B C Posts - 2 PDFhmmohanNo ratings yet
- Basic ElectronicsDocument113 pagesBasic ElectronicsDeivasigamani SubramaniyanNo ratings yet
- Architecture City ExhibitDocument5 pagesArchitecture City ExhibitAlessio ErioliNo ratings yet
- Higher Education Catalogue 2017Document59 pagesHigher Education Catalogue 2017AtifNazNo ratings yet
- Assignment 3 PDFDocument15 pagesAssignment 3 PDFPArk100100% (1)
- Syllabus HRM, Jan-May 2012Document12 pagesSyllabus HRM, Jan-May 2012alejandro_garcia_240No ratings yet
- Thyexperiments Towards Truth: The Exalted Jupiter'S Punch by Saptarishis AstrologyDocument13 pagesThyexperiments Towards Truth: The Exalted Jupiter'S Punch by Saptarishis AstrologyAkash KumarNo ratings yet
- Microchem ASTM E2315 Study Report NG6838 05MAR2016Document9 pagesMicrochem ASTM E2315 Study Report NG6838 05MAR2016Vilva ManikandanNo ratings yet
- Sandeep ResumeDocument3 pagesSandeep ResumeSandeep ElluubhollNo ratings yet
- Construction Supply Chain ManagementDocument10 pagesConstruction Supply Chain ManagementElijah AppiaheneNo ratings yet
- ENGG 400 Engineering Ethics DilemmasDocument34 pagesENGG 400 Engineering Ethics DilemmasShashwat ChakrabortiNo ratings yet
- Meth Confronting The ProblemDocument1 pageMeth Confronting The ProblemamychowNo ratings yet
- Conditonal Rendering UIDocument5 pagesConditonal Rendering UIAnonymous 52QjEhWNo ratings yet
- 1Document13 pages1ihpeterNo ratings yet
- Building ZAP With Eclipse v1.0Document12 pagesBuilding ZAP With Eclipse v1.0MagnoLoganNo ratings yet
- Journal of Prostho ResearchDocument4 pagesJournal of Prostho ResearchShraddha AgarwalNo ratings yet
- Archana PriyadarshiniDocument7 pagesArchana PriyadarshiniJagriti KumariNo ratings yet
- The Big Three of Greek PhilosophyDocument3 pagesThe Big Three of Greek PhilosophyGhian LaguitaoNo ratings yet
- Kahoot Koonji Intro To PM Week 1 7Document7 pagesKahoot Koonji Intro To PM Week 1 7tamanna sharmaNo ratings yet
- Propositional LogicDocument26 pagesPropositional LogicSeham123123No ratings yet
- Paragraph Writing of Academic Texts in An EFL Context: Foreign Language Teaching & LearningDocument12 pagesParagraph Writing of Academic Texts in An EFL Context: Foreign Language Teaching & LearningMary MazeeNo ratings yet
- Thermo Acoustic Air ConditioningDocument36 pagesThermo Acoustic Air ConditioningBhavin879No ratings yet
- Selecc Primitive-Culture-1 PDFDocument15 pagesSelecc Primitive-Culture-1 PDFguadalupe_51947962100% (1)
- Project Grant Chart Al AmalDocument3 pagesProject Grant Chart Al AmalBalaji SelvarajNo ratings yet
- JOEL Microscopio UntitledDocument2 pagesJOEL Microscopio UntitledFrancisco_Patt_9809No ratings yet
- Caracterización Y Zonificación Edáfica Y Climática de La Región de Coquimbo, ChileDocument23 pagesCaracterización Y Zonificación Edáfica Y Climática de La Región de Coquimbo, ChileSantos DamasNo ratings yet
- How To Write A Purpose Statement For A Research PaperDocument3 pagesHow To Write A Purpose Statement For A Research Paperfllahvwhd100% (1)
- Chapter 2 Psychrometric ChartDocument41 pagesChapter 2 Psychrometric ChartMuhammad Abdullah92% (13)
- Factors Affecting Student AchievementDocument15 pagesFactors Affecting Student Achievementhayatudin jusufNo ratings yet
- Analisis Tingkat Keterampilan Berpikir Kritis Siswa SMA: Jurnal Pendidikan Fisika Dan Teknologi February 2020Document7 pagesAnalisis Tingkat Keterampilan Berpikir Kritis Siswa SMA: Jurnal Pendidikan Fisika Dan Teknologi February 2020Nurkholifatul MaulaNo ratings yet
- The Culverhouse College of Commerce Executive Magazine - Spring 2013 EditionDocument68 pagesThe Culverhouse College of Commerce Executive Magazine - Spring 2013 EditionCulverhouse InteractiveNo ratings yet
- Technical Analysis Around The WorldDocument30 pagesTechnical Analysis Around The Worldshorttermblog100% (1)