You might also like
- Health Effects of Exposure To Ultrasound and Infrasound PDFDocument196 pagesHealth Effects of Exposure To Ultrasound and Infrasound PDFSri Nivas Chandrasekaran100% (1)
- Ultrasound Beamforming and Image Formation ExplainedDocument48 pagesUltrasound Beamforming and Image Formation ExplainedSri Nivas ChandrasekaranNo ratings yet
- BME11Lecture15 06Document78 pagesBME11Lecture15 06Sri Nivas ChandrasekaranNo ratings yet
- Green's Functions For The Stretched String Problem: D. R. Wilton ECE DeptDocument34 pagesGreen's Functions For The Stretched String Problem: D. R. Wilton ECE DeptSri Nivas ChandrasekaranNo ratings yet
- Audits: Presentation By: Suresh R. Norman SSN College of EngineeringDocument12 pagesAudits: Presentation By: Suresh R. Norman SSN College of EngineeringSri Nivas ChandrasekaranNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- AlarmsReference ME-B 1212 PDFDocument130 pagesAlarmsReference ME-B 1212 PDFNAGENDRA KUMAR DNo ratings yet
- 1993 - Distillation Column TargetsDocument12 pages1993 - Distillation Column TargetsOctaviano Maria OscarNo ratings yet
- Online Ticket Reservation SystemDocument100 pagesOnline Ticket Reservation SystemPiya SharmaNo ratings yet
- Chapter 4 Wastewater Collection and TransportationDocument8 pagesChapter 4 Wastewater Collection and Transportationmulabbi brian100% (1)
- Class XII Computer Science: HOTS (High Order Thinking Skill)Document14 pagesClass XII Computer Science: HOTS (High Order Thinking Skill)JanakiNo ratings yet
- Pinza Prova 5601Document2 pagesPinza Prova 5601Sublimec San RafaelNo ratings yet
- Boeco Mantas de CalentamientoDocument2 pagesBoeco Mantas de CalentamientoJhon VallejoNo ratings yet
- ICC ES Report: Barsplice Products, IncDocument6 pagesICC ES Report: Barsplice Products, IncXiomara Muñoz MendozaNo ratings yet
- DemarcationDocument4 pagesDemarcationpradz4No ratings yet
- High-Temp, Non-Stick Ceramic Cookware CoatingDocument3 pagesHigh-Temp, Non-Stick Ceramic Cookware CoatingTomescu MarianNo ratings yet
- Power-Master III Drum PumpsDocument5 pagesPower-Master III Drum PumpsGuntur SoebankNo ratings yet
- A Study On Customer Satisfaction Towards Online Banking ServicesDocument12 pagesA Study On Customer Satisfaction Towards Online Banking ServicesEditor IJTSRD100% (1)
- Möller Valve Spherical Closing Segment Universal ValveDocument2 pagesMöller Valve Spherical Closing Segment Universal ValveYhaneNo ratings yet
- Hydraulic Excavator GuideDocument9 pagesHydraulic Excavator Guidewritetojs100% (1)
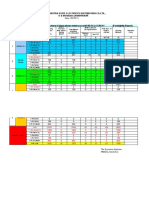
- Maharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARDocument3 pagesMaharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARPuru BornareNo ratings yet
- Cross-Cultural Issues in Business Ethics: John Hooker Carnegie Mellon University June 2007Document28 pagesCross-Cultural Issues in Business Ethics: John Hooker Carnegie Mellon University June 2007modaloves1242100% (2)
- 3D PrintingDocument32 pages3D Printing9700216256No ratings yet
- Barangay Profile: (BP DCF No. 1 S. 2022)Document4 pagesBarangay Profile: (BP DCF No. 1 S. 2022)AiMae BaobaoenNo ratings yet
- BASH Shell Scripting SyllabusDocument4 pagesBASH Shell Scripting SyllabusAdzmely Mansor100% (1)
- CMM49 14 01 MtocDocument2 pagesCMM49 14 01 MtocMichail K100% (1)
- Checklist For BrickworkDocument2 pagesChecklist For Brickworkइंजि कौस्तुभ पवारNo ratings yet
- UDRPDocument10 pagesUDRPDomainNameWire100% (1)
- Electronically Controlled On-Demand 4WDDocument32 pagesElectronically Controlled On-Demand 4WDjulio797No ratings yet
- Detailed Statement: Transactions List - Squaircle Energy and Constructions Private Limited (Inr) - 677605600669Document3 pagesDetailed Statement: Transactions List - Squaircle Energy and Constructions Private Limited (Inr) - 677605600669ankit008dixitNo ratings yet
- Unitrans ZXONM E300 (V3.17) Installation ManualDocument35 pagesUnitrans ZXONM E300 (V3.17) Installation ManualMohamed YagoubNo ratings yet
- Marine Fuel Stability and Compatibility IssuesDocument4 pagesMarine Fuel Stability and Compatibility IssuesRebekah SchmidtNo ratings yet
- Class B BiosolidsDocument9 pagesClass B BiosolidsGissmoNo ratings yet
- Effect of CSR on Corporate Reputation and PerformanceDocument13 pagesEffect of CSR on Corporate Reputation and PerformanceAnthon AqNo ratings yet
- Urban Transit Systems and Technology Vuchic PDFDocument614 pagesUrban Transit Systems and Technology Vuchic PDFARAVIND PATIL100% (1)
- Convert Tank to Wash Service Hazards ReviewDocument74 pagesConvert Tank to Wash Service Hazards ReviewMatthew Adeyinka0% (1)