You might also like
- Thermal Power Plant: M.Vijayaragavan Assistant Professor Mailam Engineering College MailamDocument44 pagesThermal Power Plant: M.Vijayaragavan Assistant Professor Mailam Engineering College MailampanthamangalamNo ratings yet
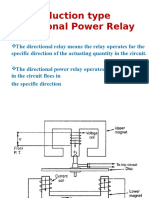
- Induction Type Directional Power Relay: The Directional Relay Means The Relay Operates For TheDocument7 pagesInduction Type Directional Power Relay: The Directional Relay Means The Relay Operates For ThepanthamangalamNo ratings yet
- TN SSLC District 2013Document2 pagesTN SSLC District 2013panthamangalamNo ratings yet
- Unit I DC Corrected Version-LibDocument32 pagesUnit I DC Corrected Version-LibpanthamangalamNo ratings yet
- Brochure Off Grid, Back Up and Island Systems en WebDocument84 pagesBrochure Off Grid, Back Up and Island Systems en WebpanthamangalamNo ratings yet
- Led DisplaysDocument1 pageLed DisplayspanthamangalamNo ratings yet
- SpringDocument1 pageSpringpanthamangalamNo ratings yet
- Test 33Document1 pageTest 33panthamangalamNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Motherboard Manual Ga-73pvm-S2h PDFDocument100 pagesMotherboard Manual Ga-73pvm-S2h PDFFlorianisNo ratings yet
- NumixokevekDocument5 pagesNumixokevekRizky Ardiansah McNo ratings yet
- FM Transmitter Circuit DiagramDocument7 pagesFM Transmitter Circuit DiagramJose Garcia50% (2)
- The Business Case For GPON in FTTP NetworksDocument5 pagesThe Business Case For GPON in FTTP NetworksTaha Wajahat100% (2)
- KX-TA824: Programming ManualDocument236 pagesKX-TA824: Programming ManualFARHAN MEMONNo ratings yet
- IOT Unit 3 To 5 MaterialDocument118 pagesIOT Unit 3 To 5 Materialpriya100% (1)
- F5 Big-Ip:: Created by Ahmad Ali E-Mail:, Mobile: 056 430 3717Document7 pagesF5 Big-Ip:: Created by Ahmad Ali E-Mail:, Mobile: 056 430 3717Deep MehtaNo ratings yet
- Mini Hi-Fi System: Service ManualDocument83 pagesMini Hi-Fi System: Service ManualAnonymous Lfgk6vygNo ratings yet
- CCSZ r14.1 Administration GuideDocument359 pagesCCSZ r14.1 Administration Guideborisg3No ratings yet
- LCD Color Television 47VL963G: Service ManualDocument126 pagesLCD Color Television 47VL963G: Service ManualDaniel Zorrilla100% (1)
- PLSQLDocument78 pagesPLSQLPrathibha RNo ratings yet
- 3 Leg and 4 Leg InverterDocument18 pages3 Leg and 4 Leg InverterMuthukumarNo ratings yet
- CN LabDocument50 pagesCN LabSockalinganathan NarayananNo ratings yet
- And Quality: Scan Compression Techniques To Improve Test TimeDocument5 pagesAnd Quality: Scan Compression Techniques To Improve Test TimeSudhir BorraNo ratings yet
- A000066 DatasheetDocument13 pagesA000066 DatasheetShaheer AliNo ratings yet
- Log4OM Enu PDFDocument218 pagesLog4OM Enu PDFjaiherd100% (1)
- Ip-Acm-V2-Ethernet-Door Ds r01 Hs enDocument3 pagesIp-Acm-V2-Ethernet-Door Ds r01 Hs enMoisesManuelBravoLeonNo ratings yet
- No.78 - DOC - Microsoft C, C++Document966 pagesNo.78 - DOC - Microsoft C, C++dunia researcherNo ratings yet
- How Do I Crack Satellite and Cable Pay TV SlidesDocument65 pagesHow Do I Crack Satellite and Cable Pay TV SlidesChris Gerlinsky100% (1)
- 88E6218 Datasheet (1 of 3)Document84 pages88E6218 Datasheet (1 of 3)BenNo ratings yet
- 03 Downstream GFB Series Operation ManualDocument12 pages03 Downstream GFB Series Operation ManualDamian VillarNo ratings yet
- Apple Iphone 6S N66 Schematics PDFDocument60 pagesApple Iphone 6S N66 Schematics PDFDj-Samuel OliveiraNo ratings yet
- Seminar Report TemplateDocument25 pagesSeminar Report TemplateNavya GadiparthiNo ratings yet
- 02 HeiTel CamControl LITE Tds English Lores PDFDocument2 pages02 HeiTel CamControl LITE Tds English Lores PDFAndres Arias C.No ratings yet
- Online Placement System ReportDocument70 pagesOnline Placement System ReportBharat Ahuja0% (1)
- Tema 03 - NFVDocument37 pagesTema 03 - NFVJuan Gabriel Ochoa AldeánNo ratings yet
- FQPF 8 N 60 CFDocument8 pagesFQPF 8 N 60 CFBhadreshkumar SharmaNo ratings yet
- Openworks Install PropertiesDocument3 pagesOpenworks Install PropertiesAlfian AminNo ratings yet
- H61h2i5 Manual PDFDocument84 pagesH61h2i5 Manual PDFArijit BhattacharyaNo ratings yet
- Microsemi Corporation One Enterprise, Aliso Viejo CA 92656 USA Within The USA: +1 (949) 380-6100 Sales: +1 (949) 380-6136 Fax: +1 (949) 215-4996Document2 pagesMicrosemi Corporation One Enterprise, Aliso Viejo CA 92656 USA Within The USA: +1 (949) 380-6100 Sales: +1 (949) 380-6136 Fax: +1 (949) 215-4996Darko LekicNo ratings yet