You might also like
- Aplicasion de ED en Ing. CivilDocument16 pagesAplicasion de ED en Ing. Civilmiguel angel aguilar diazNo ratings yet
- Teoria Condensacion EstáticaDocument7 pagesTeoria Condensacion EstáticaEdison Geovanny TierraNo ratings yet
- Comparación Cimentaciones ElásticasDocument19 pagesComparación Cimentaciones ElásticasPatricio PalaciosNo ratings yet
- Análisis de Vivienda Unifamiliar Aplicando El Teorema de CastiglianoDocument33 pagesAnálisis de Vivienda Unifamiliar Aplicando El Teorema de CastiglianoGiancarlo René Bendezú MartínezNo ratings yet
- Teoria de TerzaghiDocument7 pagesTeoria de TerzaghiAreli PerezNo ratings yet
- Viga Doblemente ArmadaDocument12 pagesViga Doblemente ArmadaEstefania BlackNo ratings yet
- WSB AME-Cap.4-5 Sistematización Método RigidezDocument135 pagesWSB AME-Cap.4-5 Sistematización Método Rigidezjuan carlos jimenezNo ratings yet
- Definicion de Matriz de RigidezDocument11 pagesDefinicion de Matriz de Rigidezcarlos Francisco Heras QuinteroNo ratings yet
- Análisis de Viga y Marcos Formado Con Miembros No PrimaticosDocument18 pagesAnálisis de Viga y Marcos Formado Con Miembros No PrimaticosLois NegretteNo ratings yet
- A Metrados Introducción - 30 Nov 17Document40 pagesA Metrados Introducción - 30 Nov 17Yeny Quincho HilarioNo ratings yet
- Comparacion Entre Rigidez y FlexibilidadDocument18 pagesComparacion Entre Rigidez y FlexibilidadAlejandra Briones MartinezNo ratings yet
- Metodo de Cross para Marcos Sin Desplazamiento LateralDocument4 pagesMetodo de Cross para Marcos Sin Desplazamiento Lateralmarcelo aza nuñezNo ratings yet
- Ingenieria Sismorresistente - Sesion 9 PDFDocument34 pagesIngenieria Sismorresistente - Sesion 9 PDFEduardo OreNo ratings yet
- El Método de CrossDocument6 pagesEl Método de CrossDaniel VSNo ratings yet
- Ejericcio 6Document10 pagesEjericcio 6D'kEiFaQqNo ratings yet
- Método de RigidezDocument34 pagesMétodo de Rigidezjordant100% (1)
- Vibraciones Libres No AmortiguadasDocument40 pagesVibraciones Libres No AmortiguadasEmhilssen Tafur50% (2)
- Metodo MutoDocument13 pagesMetodo MutoRonaldo Aldair Perales ChávezNo ratings yet
- Diapositivas Del Curso de Analisis Estructural IIDocument11 pagesDiapositivas Del Curso de Analisis Estructural IICésar Ramón Guillén GuillénNo ratings yet
- Sucesiones y Series-Matemática IIDocument35 pagesSucesiones y Series-Matemática IIDavid Lizana GarciaNo ratings yet
- Deber DeformacionesUnitariasDocument2 pagesDeber DeformacionesUnitariasLukas GalarzaNo ratings yet
- Metodos de Calculo de Regidez LateralDocument28 pagesMetodos de Calculo de Regidez LateralmarlexirNo ratings yet
- Calculo Matricial de EstructurasDocument155 pagesCalculo Matricial de EstructurasmauricioNo ratings yet
- Clase 05 Metodo de Las FuerzasDocument10 pagesClase 05 Metodo de Las FuerzasAndre Torres0% (1)
- Informe Matriz de Rigidez LateralDocument24 pagesInforme Matriz de Rigidez LateralMilagros Giomar Arevalo Pisco100% (2)
- Lineas de Influencia-Teria TerminadoDocument25 pagesLineas de Influencia-Teria TerminadosoniajulianaNo ratings yet
- Trabajo Monografico de Analisis Estructural IDocument21 pagesTrabajo Monografico de Analisis Estructural ITracey CoffeyNo ratings yet
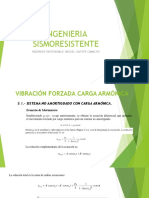
- S03 - Carga Armónica PDFDocument41 pagesS03 - Carga Armónica PDFwendyNo ratings yet
- Cuaderno Estructuras II-Aguirre KarinaDocument169 pagesCuaderno Estructuras II-Aguirre KarinaChristian XBNo ratings yet
- Silabo - ANALISIS ESTRUCTURAL IDocument4 pagesSilabo - ANALISIS ESTRUCTURAL IDaylu Pagola AvilaNo ratings yet
- Metodo de RayleighDocument17 pagesMetodo de RayleighLuis Ivan Palma GonzalezNo ratings yet
- Método de Amplificación de MomentosDocument4 pagesMétodo de Amplificación de MomentosDiana Valdivia Quelopana0% (1)
- Física ResumenDocument15 pagesFísica ResumenFRANCIS DANIEL ASENCIO MONTOYANo ratings yet
- Memoria de Cálculo, Formato EdificaciónDocument26 pagesMemoria de Cálculo, Formato EdificaciónJamie Augusto Gálvez Alvarado100% (1)
- Clase 07.b Virtual Instalaciones Pucp AdicionalDocument73 pagesClase 07.b Virtual Instalaciones Pucp AdicionalYonatan Florian AlcantaraNo ratings yet
- Infiltracion EscorrentiaDocument16 pagesInfiltracion EscorrentiaJhonatan Torres CancioNo ratings yet
- Analisis Estructural Ing GodiñoDocument45 pagesAnalisis Estructural Ing GodiñoLuis Huaman HuamanNo ratings yet
- Vulnerabilidad SismicaDocument26 pagesVulnerabilidad SismicaPaulo Mejia TrejoNo ratings yet
- Ejc Hidraulica 2Document7 pagesEjc Hidraulica 2Camila OrtizNo ratings yet
- Criterio de Diseño en RoturaDocument4 pagesCriterio de Diseño en RoturaSolis Dominguez Didmar0% (1)
- Aplicación Del Metodo Del Área de MomentosDocument6 pagesAplicación Del Metodo Del Área de MomentosCristian Chavez ReyesNo ratings yet
- Redes de TuberíasDocument4 pagesRedes de TuberíasLuisAngelCordovadeSanchezNo ratings yet
- Método de La Fuerza y Teorema de Betti-Maxwell PDFDocument7 pagesMétodo de La Fuerza y Teorema de Betti-Maxwell PDFArturoBaldéonNo ratings yet
- Análisis Estático Lineal 3dDocument7 pagesAnálisis Estático Lineal 3dKevin Michael Villanueva LinoNo ratings yet
- Analisis Estructural PDFDocument183 pagesAnalisis Estructural PDFedsson jesusNo ratings yet
- Trabajo de Dinamikaca VibracionesDocument12 pagesTrabajo de Dinamikaca Vibracionesrene99No ratings yet
- MutoDocument9 pagesMutoGloria Rosalia Ramos Cunurana100% (1)
- Presentación ANALISIS ESTRUCTURAL1Document24 pagesPresentación ANALISIS ESTRUCTURAL1MatíasYarráNo ratings yet
- Vibracion Libre Con AmortiguamientoDocument9 pagesVibracion Libre Con AmortiguamientoFernando Lucio Rodriguez MillaNo ratings yet
- Vibración ForzadaDocument65 pagesVibración ForzadaYahirSantaCruzNúñezNo ratings yet
- Drenaje Vial CunetaDocument6 pagesDrenaje Vial CunetaCamilo MancipeNo ratings yet
- Cercha Ejemplo41Document21 pagesCercha Ejemplo41Pablo QuispeNo ratings yet
- Principio de Muller Breslau PDFDocument6 pagesPrincipio de Muller Breslau PDFepazt12-1No ratings yet
- Ensayo-Método de Cross para Marcos Sin Desplazamiento LateralDocument7 pagesEnsayo-Método de Cross para Marcos Sin Desplazamiento LateralOwen AvitiaNo ratings yet
- Condensación de Una Matriz de RigidezDocument6 pagesCondensación de Una Matriz de Rigideznaldo15840% (1)
- Condensacion de Una Matriz RigidezDocument11 pagesCondensacion de Una Matriz RigidezAlejandra Briones MartinezNo ratings yet
- Vigas EjerciciosDocument13 pagesVigas EjerciciosJC Casafranca Sayas100% (1)
- Taller Método de Rigidez DirectoDocument9 pagesTaller Método de Rigidez DirectoHarold LealNo ratings yet
- Rio RimacDocument44 pagesRio Rimacyaser100% (1)
- Clasificación de Suelos 1Document23 pagesClasificación de Suelos 1yaserNo ratings yet
- Costos ArquitecturaDocument3 pagesCostos ArquitecturayaserNo ratings yet
- Pendiente Tuberias Hazen Williams (DpulgDocument2 pagesPendiente Tuberias Hazen Williams (DpulgyaserNo ratings yet
- Negociación 3 D El Juego TotalDocument11 pagesNegociación 3 D El Juego Totalyaser0% (1)
- Informe de Rubrica DiseñoDocument31 pagesInforme de Rubrica DiseñoJoseph Stiven RiverosNo ratings yet
- Procedimiento para El Monitoreo de RuidoDocument9 pagesProcedimiento para El Monitoreo de RuidoPierreNo ratings yet
- Practica de RetortaDocument11 pagesPractica de RetortaIDaniel RendonlNo ratings yet
- Proyecto SiemensDocument47 pagesProyecto SiemensPablo LayanaNo ratings yet
- Calculo de CilindrosDocument11 pagesCalculo de CilindrosMartin Rios100% (1)
- Laboratorio 3 (E. Digital)Document16 pagesLaboratorio 3 (E. Digital)NiltonRamírezNo ratings yet
- POROSIDADDocument7 pagesPOROSIDADalvaro100% (1)
- PREVIO 2 Es1Document7 pagesPREVIO 2 Es1ChristianCastilloNo ratings yet
- Proyecto Fclds Campo ItauDocument46 pagesProyecto Fclds Campo ItauDrillerman Gonzales Ovando100% (1)
- Bioquimica MicrobianaDocument6 pagesBioquimica MicrobianaCrissanto RoldanNo ratings yet
- Tesis Mexicana de Vida Util de Los Materiales de ConstruccionDocument133 pagesTesis Mexicana de Vida Util de Los Materiales de ConstruccionOscar Ramírez100% (2)
- Material de Preparacion - Segunda Fase ONEM 2012 - Nivel II - 002Document4 pagesMaterial de Preparacion - Segunda Fase ONEM 2012 - Nivel II - 002viterick100% (1)
- Radiacion SolarDocument7 pagesRadiacion SolarDanilo Enrique Núñez DonosoNo ratings yet
- Definición Corriente-VoltajeDocument4 pagesDefinición Corriente-VoltajeLuiz FriasNo ratings yet
- Sumas de Riemann Y TFCDocument6 pagesSumas de Riemann Y TFCDiego VasquezNo ratings yet
- Catalogo Rayos X FiadDocument8 pagesCatalogo Rayos X FiadIRIANANo ratings yet
- Ejercicios Resueltos de Porticos y VigasDocument25 pagesEjercicios Resueltos de Porticos y VigasCompu Red50% (2)
- Microsoft Word - Uso y Cuidado Del Microscopio y Lupa BinocularDocument4 pagesMicrosoft Word - Uso y Cuidado Del Microscopio y Lupa Binoculartzol100% (1)
- Pets Mantto Camionetas V° B°Document24 pagesPets Mantto Camionetas V° B°Rony LaurenteNo ratings yet
- PTC-111-02 Protocolo Calificación RPM EQUIPOSDocument6 pagesPTC-111-02 Protocolo Calificación RPM EQUIPOSStiv LhNo ratings yet
- 2 Basico - Cs. Naturales - Norma - EstudianteDocument122 pages2 Basico - Cs. Naturales - Norma - EstudianteGessy MoherbalNo ratings yet
- Metodo Pleyadiano2Document13 pagesMetodo Pleyadiano2Legado Pleyadiano Tecnicas HolisticasNo ratings yet
- La Estructura de La Magia Capitulo 1Document5 pagesLa Estructura de La Magia Capitulo 1AdrianaLlambiasDapeñaNo ratings yet
- Tema 4 (Polinomios)Document16 pagesTema 4 (Polinomios)lgf58No ratings yet
- El Arte de Combinar El Sí Con El NoDocument123 pagesEl Arte de Combinar El Sí Con El NoDaniela RojasNo ratings yet
- Notice Chauffe Eau Elec 10L 150L FR88 DocpdfDocument15 pagesNotice Chauffe Eau Elec 10L 150L FR88 DocpdfAlpha1201No ratings yet
- Informe FCOP+ P14Document2 pagesInforme FCOP+ P14Nicolas Cuevas RojasNo ratings yet
- Semana Cinco Dominio Corporal y EscenicoDocument20 pagesSemana Cinco Dominio Corporal y EscenicoJoel Cad Pad100% (1)
- Folleto Recomendaciones de Limpieza y Mantenimiento AMBÚDocument2 pagesFolleto Recomendaciones de Limpieza y Mantenimiento AMBÚLeonel Losada CardozoNo ratings yet
- Fís 225, Campo MagnéticoDocument8 pagesFís 225, Campo Magnéticoroque bretonNo ratings yet