You might also like
- Chapter 3-BalancingDocument30 pagesChapter 3-BalancingHafzal GaniNo ratings yet
- Aits 2324 PT I Jeea Paper 2 SolDocument11 pagesAits 2324 PT I Jeea Paper 2 Solnoobpromax42No ratings yet
- STATICANDDYNAMICBALANCEDocument16 pagesSTATICANDDYNAMICBALANCEHarith TsaqifNo ratings yet
- 4-Problems-Balancing-Rotating MassesDocument5 pages4-Problems-Balancing-Rotating MassesvrushNo ratings yet
- Mechanics of Machine 2 NotesDocument117 pagesMechanics of Machine 2 NotesChris MuturiNo ratings yet
- Lect BalancingDocument72 pagesLect BalancingTalha KhanzadaNo ratings yet
- 5 2021 12 20!09 46 27 PMDocument25 pages5 2021 12 20!09 46 27 PMDeepto BanerjeeNo ratings yet
- BALANCINGDocument72 pagesBALANCINGSerhat YıldırımNo ratings yet
- Lecture - 1 Balancing of Masses Theory of MachineDocument47 pagesLecture - 1 Balancing of Masses Theory of MachineabasNo ratings yet
- Lecture 16 Rotational Torque Nov 8-1Document22 pagesLecture 16 Rotational Torque Nov 8-1Sterling Phillip ThomasNo ratings yet
- Theory of Machine: BalancingDocument51 pagesTheory of Machine: Balancingnishant dhimanNo ratings yet
- Centripetal Forces ExplainedDocument9 pagesCentripetal Forces ExplainedKaPíl JêThwañìNo ratings yet
- The Ability of A Force To Rotate A Body About Some Axis.: TorqueDocument37 pagesThe Ability of A Force To Rotate A Body About Some Axis.: TorqueWendy RissmeyerNo ratings yet
- Rotational Kinematic and Rotational Dynamics-1Document76 pagesRotational Kinematic and Rotational Dynamics-1simon mambo100% (1)
- Balancing of Rotating MassesDocument9 pagesBalancing of Rotating MassesEricNo ratings yet
- Rotational Dynamics-03-Subjective SolvedDocument16 pagesRotational Dynamics-03-Subjective SolvedRaju SinghNo ratings yet
- GyroscopeDocument7 pagesGyroscopevijay2293No ratings yet
- Balancing OF Reciprocating Masses: Slider Crank MechanismDocument43 pagesBalancing OF Reciprocating Masses: Slider Crank MechanismHiiNo ratings yet
- DOM Group PPT Vertical Shaft BalancingDocument12 pagesDOM Group PPT Vertical Shaft BalancingPhalgunNo ratings yet
- Unit II Balancingofrotatingmasses 210207040000Document23 pagesUnit II Balancingofrotatingmasses 210207040000ShanmuganathanNo ratings yet
- Experiment 12: Rotational Equilibrium: PurposeDocument6 pagesExperiment 12: Rotational Equilibrium: PurposeRakotoarison Louis FrederickNo ratings yet
- 10 Chapter 12 Balancing-StudentDocument82 pages10 Chapter 12 Balancing-StudentpayingintanNo ratings yet
- Dynamics of Rotating Rigid BodyDocument187 pagesDynamics of Rotating Rigid BodyIsrael OluwayomiNo ratings yet
- Module-4 - Balancing of Rotating MassesDocument46 pagesModule-4 - Balancing of Rotating MassesNIKHIL ASNo ratings yet
- Balancing of Rotating Masses: The Following Cases Are Important From The Subject Point of ViewDocument32 pagesBalancing of Rotating Masses: The Following Cases Are Important From The Subject Point of ViewAntony Jacob KNo ratings yet
- UEME3133 Lab 2Document12 pagesUEME3133 Lab 2Ooizh HoengNo ratings yet
- BALANCING ROTATING MASSESDocument26 pagesBALANCING ROTATING MASSESEngineering DesignNo ratings yet
- Calculating moments and forces using the principle of momentDocument12 pagesCalculating moments and forces using the principle of momentFatimah AfzalNo ratings yet
- ME 3507: Theory of Machines: BalancingDocument60 pagesME 3507: Theory of Machines: Balancingusama riazNo ratings yet
- CH-10 Plane Motion of Rigid Bodies 2Document13 pagesCH-10 Plane Motion of Rigid Bodies 2Anshuman SinghNo ratings yet
- Chapter 5 Internal Action in BeamDocument21 pagesChapter 5 Internal Action in BeamTewodros AliNo ratings yet
- Dam23803c3 BalancingDocument39 pagesDam23803c3 BalancingnasiNo ratings yet
- 1 - TorqueDocument9 pages1 - TorqueIvy GalamitonNo ratings yet
- PHYS 101: General Physics 1 Laboratory: Experiment #5Document25 pagesPHYS 101: General Physics 1 Laboratory: Experiment #5Recep ivedikseverNo ratings yet
- Sme1206-2 0Document25 pagesSme1206-2 0Anantha ReddyNo ratings yet
- 4 AP C Free Response Questions and Answers Due MonDocument4 pages4 AP C Free Response Questions and Answers Due MonPadma GundapaneniNo ratings yet
- Balancing of Reciprocating MassesDocument24 pagesBalancing of Reciprocating MassesSomnath SomadderNo ratings yet
- Reciprocating Balancing: Contents of This FileDocument12 pagesReciprocating Balancing: Contents of This FileHidayatullah HidayatullahNo ratings yet
- L15 PDFDocument15 pagesL15 PDFlesNo ratings yet
- Physics torque equilibrium conditionsDocument13 pagesPhysics torque equilibrium conditionsJohn Dale IbaleNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedSrinivas BalivadaNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedMohammad Ishfaq BhatNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedRuchindra KumarNo ratings yet
- Balancing Rotating MassesDocument25 pagesBalancing Rotating Masseslulu adityaNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedSrinivas BalivadaNo ratings yet
- General Physics 1 Q2 W1 M1 LDS Static-Equilibrium ALG RTPDocument17 pagesGeneral Physics 1 Q2 W1 M1 LDS Static-Equilibrium ALG RTPJaz KadiaNo ratings yet
- Types of BrakesDocument12 pagesTypes of Brakesذوالفقار علي حسينNo ratings yet
- Engineering Mechanics Notes: Statics, Forces, Moments, and FrameworksDocument8 pagesEngineering Mechanics Notes: Statics, Forces, Moments, and FrameworksTourlêy MunroNo ratings yet
- ROTATING MASSES BALANCINGDocument25 pagesROTATING MASSES BALANCINGEngineering DesignNo ratings yet
- Mechanics of Machinery 2 - Balancing of Rotating MassesDocument11 pagesMechanics of Machinery 2 - Balancing of Rotating MassesAhmed Zawad ShovonNo ratings yet
- SHM 3Document27 pagesSHM 3THE PHYSICS TEACHERNo ratings yet
- BeercanDocument16 pagesBeercanEncounterYTNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedHizbullah SattiNo ratings yet
- System of Particles All Derivations NewDocument9 pagesSystem of Particles All Derivations NewManish PattajoshiNo ratings yet
- Three Cylinder Engine Turning Moment Diagram AnalysisDocument57 pagesThree Cylinder Engine Turning Moment Diagram AnalysisRasikaPereraNo ratings yet
- Mechanical Engineering Dynamics Tutorial SheetDocument2 pagesMechanical Engineering Dynamics Tutorial SheetRishi Kumar0% (1)
- Kinematics of Rigid Bodies (CH. 15Document7 pagesKinematics of Rigid Bodies (CH. 15Kaiss Nael OsmanNo ratings yet
- Static DynamicDocument6 pagesStatic DynamicKrishna Kumar AlagarNo ratings yet
- Niosh PDD Sho 2019 PDFDocument15 pagesNiosh PDD Sho 2019 PDFAl- ImanuddinNo ratings yet
- Niosh PDD TTT2 PDFDocument5 pagesNiosh PDD TTT2 PDFDanielRaoNo ratings yet
- Niosh PDD TTT2 PDFDocument5 pagesNiosh PDD TTT2 PDFDanielRaoNo ratings yet
- Isometric HornDocument1 pageIsometric HornDanielRaoNo ratings yet
- Isometric HornDocument1 pageIsometric HornDanielRaoNo ratings yet
- Bolospeed RC CalculatorDocument4 pagesBolospeed RC CalculatorDanielRao56% (9)
- Niosh PDD TTT2 PDFDocument5 pagesNiosh PDD TTT2 PDFDanielRaoNo ratings yet
- Niosh PDD TTT2 PDFDocument5 pagesNiosh PDD TTT2 PDFDanielRaoNo ratings yet
- SalerioDocument28 pagesSalerioRizqaFebrilianyNo ratings yet
- Chapter 2-Belt Drive SystemDocument29 pagesChapter 2-Belt Drive SystemDanielRao100% (1)
- Acoustic Measurements: M. Vorl AnderDocument31 pagesAcoustic Measurements: M. Vorl AnderDanielRaoNo ratings yet
- Radiography Inspection NDT Sample Test Report Format PDFDocument2 pagesRadiography Inspection NDT Sample Test Report Format PDFDanielRaoNo ratings yet
- Book 1Document1 pageBook 1DanielRaoNo ratings yet
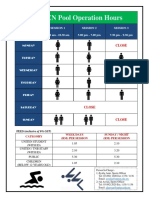
- Pool Operation Hours (Usual)Document1 pagePool Operation Hours (Usual)DanielRaoNo ratings yet
- Chapter 4-FrictionDocument32 pagesChapter 4-FrictionDanielRao100% (1)
- Chapter 5-MechanismDocument28 pagesChapter 5-MechanismDanielRaoNo ratings yet
- Chapter 1-Gear SystemDocument27 pagesChapter 1-Gear SystemDanielRao100% (2)
- Bode Solu (1) 2Document11 pagesBode Solu (1) 2DanielRaoNo ratings yet
- FIND THE BOOKS OF THE BIBLEDocument6 pagesFIND THE BOOKS OF THE BIBLEDanielRaoNo ratings yet
- Internal Rate of Return (IRR) Analysis: Lecture No. 24 Contemporary Engineering EconomicsDocument22 pagesInternal Rate of Return (IRR) Analysis: Lecture No. 24 Contemporary Engineering EconomicsDanielRaoNo ratings yet
- Kl/kajang Trip (3 Days 2 Nights) 02/12/16-04/12/16 First Day (02/12/2016)Document1 pageKl/kajang Trip (3 Days 2 Nights) 02/12/16-04/12/16 First Day (02/12/2016)DanielRaoNo ratings yet
- Cell Group ActivityDocument15 pagesCell Group ActivityDanielRaoNo ratings yet
- Final Exam QuestionsDocument6 pagesFinal Exam QuestionsDanielRaoNo ratings yet
- Unsteady Exp Data N GraphsDocument6 pagesUnsteady Exp Data N GraphsDanielRaoNo ratings yet
- Kampus Putrajaya Draft Examination Timetable Semester 1 20162017 - 2Document4 pagesKampus Putrajaya Draft Examination Timetable Semester 1 20162017 - 2DanielRaoNo ratings yet
- MEMB322 Mini Project: Design an Innovative Baby StrollerDocument1 pageMEMB322 Mini Project: Design an Innovative Baby StrollerDanielRaoNo ratings yet
- Resignation LetterDocument1 pageResignation LetterDanielRaoNo ratings yet
- Course Description (MESB323) - PremDocument10 pagesCourse Description (MESB323) - PremDanielRaoNo ratings yet
- Course Outline MESB323 SEM 1 (1617)Document3 pagesCourse Outline MESB323 SEM 1 (1617)DanielRaoNo ratings yet
- Project ProposalDocument13 pagesProject ProposalSyed Mustafa NajeebNo ratings yet
- Linear PM Generator for Wave Energy Conversion Design and AnalysisDocument131 pagesLinear PM Generator for Wave Energy Conversion Design and AnalysisEzaTejaKusumaNo ratings yet
- AECD QuestionsDocument7 pagesAECD QuestionssbkNo ratings yet
- UraniumDocument1 pageUraniumThe London Free PressNo ratings yet
- Design & Construction of LiBr - H2O MachineDocument26 pagesDesign & Construction of LiBr - H2O MachineRana Abdul RehmanNo ratings yet
- Scope and LimitationsDocument2 pagesScope and LimitationsMaya100% (1)
- Energizer Recharge AAA NH12-700 MahDocument1 pageEnergizer Recharge AAA NH12-700 MahQueremosabarrabás A BarrabásNo ratings yet
- Blast FurnaceDocument28 pagesBlast Furnaceavanisharma_1991No ratings yet
- Three Phase Energy Meters ListDocument4 pagesThree Phase Energy Meters Listanon_b186No ratings yet
- Proposal PresentationDocument58 pagesProposal Presentationmannu057No ratings yet
- Preheat MechanicsDocument13 pagesPreheat Mechanicstricky777100% (1)
- Engine Types and ClassificationsDocument16 pagesEngine Types and ClassificationsVõ Thanh Liêm100% (1)
- Clark GX 230Document108 pagesClark GX 230cornel_lupu100% (2)
- White Paper - Floating Solar in AsiaDocument20 pagesWhite Paper - Floating Solar in AsiatuannbNo ratings yet
- Petroleum GeologyDocument13 pagesPetroleum GeologyRaihan FuadNo ratings yet
- Piezo Energy Harvester: Piezoelectric Energy Harvesting KitDocument2 pagesPiezo Energy Harvester: Piezoelectric Energy Harvesting KitNadhifa MldNo ratings yet
- MEC307 Fluid Machinery 16900::sudhanshu Dogra 3.0 1.0 0.0 4.0 Courses With Numerical and Conceptual FocusDocument7 pagesMEC307 Fluid Machinery 16900::sudhanshu Dogra 3.0 1.0 0.0 4.0 Courses With Numerical and Conceptual FocusVinu ThomasNo ratings yet
- Smaw AssessmentDocument3 pagesSmaw Assessmenteunice achina79% (24)
- 66kV Substation Presentation SummaryDocument11 pages66kV Substation Presentation SummaryHimanshu KhandelwalNo ratings yet
- Six - Lakh Home From IIT MadrasDocument3 pagesSix - Lakh Home From IIT MadraskalpanaadhiNo ratings yet
- Available Short Circuit CurrentDocument17 pagesAvailable Short Circuit CurrentAnonymous IN80L4rRNo ratings yet
- MEC 531 Mechanical Engineering Design 1 Project ReportDocument139 pagesMEC 531 Mechanical Engineering Design 1 Project ReportAlfredoNo ratings yet
- POWERSTAR HQI-T - Metal Halide Lamps With Quartz PDFDocument4 pagesPOWERSTAR HQI-T - Metal Halide Lamps With Quartz PDFVinicius RodriguesNo ratings yet
- Report On Abu Sultan Power StationDocument9 pagesReport On Abu Sultan Power StationHammad EltayebNo ratings yet
- LG Trade Price List June 2016Document2 pagesLG Trade Price List June 2016musturNo ratings yet
- CV TLazar en WebDocument2 pagesCV TLazar en WebsayedmhNo ratings yet
- CL 9 UIMO 2024 Paper 9274 Key UpdatedDocument7 pagesCL 9 UIMO 2024 Paper 9274 Key UpdatedApoorv VarshneyNo ratings yet
- Energy conversions and calculationsDocument7 pagesEnergy conversions and calculationsMuhammad ObaidullahNo ratings yet
- Report On "Generation of Thermal Power" AT NTPC DadriDocument17 pagesReport On "Generation of Thermal Power" AT NTPC DadriVaibhav RaoNo ratings yet
- 9701 w16 QP 22Document12 pages9701 w16 QP 22Praveen PeterNo ratings yet