You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 5GHz AntennaDocument5 pages5GHz AntennaPratik AvhadNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Gan Power Amplifier Design Solutions Ebook MWJDocument33 pagesGan Power Amplifier Design Solutions Ebook MWJShakthi PriyaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Representation of Linear Digital Networks: 52 MinutesDocument6 pagesRepresentation of Linear Digital Networks: 52 Minutesapi-127299018No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Bruno TARANTO - PLL Synthesizer Loop Bandwidth OptimizationDocument12 pagesBruno TARANTO - PLL Synthesizer Loop Bandwidth OptimizationBruno AlvimNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Gan Power Amplifier Design Solutions Ebook MWJDocument33 pagesGan Power Amplifier Design Solutions Ebook MWJShakthi PriyaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 04 - RF Signal Modulation TechniquesDocument27 pages04 - RF Signal Modulation TechniquesBruno AlvimNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- UntitledDocument7 pagesUntitledapi-127299018No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- MITRES 6 008S11 Lec01Document2 pagesMITRES 6 008S11 Lec01Manoj VermaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Achieving Massive MIMO Spectral Efficiency With A Not-so-Large Number of AntennasDocument14 pagesAchieving Massive MIMO Spectral Efficiency With A Not-so-Large Number of AntennasBruno AlvimNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Software Defined Radar - An Open Source Plataform For Prototype GPR DevelopmentDocument6 pagesSoftware Defined Radar - An Open Source Plataform For Prototype GPR DevelopmentBruno AlvimNo ratings yet
- MIMO Radar - Diversity Means Superiority: Jian Li and Petre StoicaDocument6 pagesMIMO Radar - Diversity Means Superiority: Jian Li and Petre StoicaBruno AlvimNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Real Time Implementation of FMCW Radar F PDFDocument5 pagesReal Time Implementation of FMCW Radar F PDFBruno AlvimNo ratings yet
- Microwave Phase Shifters and AttenuatorsDocument3 pagesMicrowave Phase Shifters and AttenuatorsBruno AlvimNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Reciprocity Calibration Methods For Massive MIMO Based On Antenna CouplingDocument5 pagesReciprocity Calibration Methods For Massive MIMO Based On Antenna CouplingBruno AlvimNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- A Flexible Radio Transmitter For TVWS Based On FBMCDocument5 pagesA Flexible Radio Transmitter For TVWS Based On FBMCBruno AlvimNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Implementation of A Low Cost Synthetic Aperture Radar Using Software Defined RadioDocument7 pagesImplementation of A Low Cost Synthetic Aperture Radar Using Software Defined RadioBruno AlvimNo ratings yet
- Massive MIMO Real-Time Channel Measurements and Theoretic TDD Downlink Throughput PredictionsDocument6 pagesMassive MIMO Real-Time Channel Measurements and Theoretic TDD Downlink Throughput PredictionsBruno AlvimNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Rondeau GR FilteringDocument9 pagesRondeau GR FilteringBruno AlvimNo ratings yet
- 07 Rondeau PFB BasicsDocument10 pages07 Rondeau PFB BasicsBruno AlvimNo ratings yet
- Achieving Massive MIMO Spectral Efficiency With A Not-so-Large Number of AntennasDocument14 pagesAchieving Massive MIMO Spectral Efficiency With A Not-so-Large Number of AntennasBruno AlvimNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Antenna WiFiDocument5 pagesAntenna WiFiBruno AlvimNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- A Frequency Up-Down-Conversion and Filtering-Based Explanation of Phase Non-Reciprocity in Staggered Commutated Networks - Figura 4Document2 pagesA Frequency Up-Down-Conversion and Filtering-Based Explanation of Phase Non-Reciprocity in Staggered Commutated Networks - Figura 4Bruno AlvimNo ratings yet
- 5G Today Modulation Technique Alternatives PDFDocument5 pages5G Today Modulation Technique Alternatives PDFBruno AlvimNo ratings yet
- Characterizing Active Phased Array AntennasDocument35 pagesCharacterizing Active Phased Array AntennasBruno AlvimNo ratings yet
- DecibelsDocument36 pagesDecibelsBruno AlvimNo ratings yet
- Reflectometer Measurements - Revisited PDFDocument12 pagesReflectometer Measurements - Revisited PDFBruno AlvimNo ratings yet
- Using GNU Radio For Signal Phase MeasurementsDocument12 pagesUsing GNU Radio For Signal Phase MeasurementsBruno AlvimNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Remcom WirelessInSite2.8 BrochureDocument4 pagesRemcom WirelessInSite2.8 BrochureBruno AlvimNo ratings yet
- Atoll GSMDocument4 pagesAtoll GSMAli Mahmoud0% (1)
- Scientech 2801Document89 pagesScientech 2801Santiago Alberto Ramirez MarinNo ratings yet
- Introduction To Engineering Analysis 4th Edition Hagen Solutions Manual DownloadDocument66 pagesIntroduction To Engineering Analysis 4th Edition Hagen Solutions Manual DownloadDelores Cooper100% (23)
- Honeywell XNX Data SheetDocument5 pagesHoneywell XNX Data SheetpNo ratings yet
- MEMOREX mt1194Document30 pagesMEMOREX mt1194Saul ArriagaNo ratings yet
- Steady-State Characteristics of A DC MotorDocument4 pagesSteady-State Characteristics of A DC MotorhxmutNo ratings yet
- Geraldbee L. Bernardo - Quarter 2 Week 6 ExamDocument4 pagesGeraldbee L. Bernardo - Quarter 2 Week 6 ExamSensei RyeNo ratings yet
- 300Mbps Wireless N PCI Adapter: TL-WN851NDDocument2 pages300Mbps Wireless N PCI Adapter: TL-WN851NDRiyan LesmanaNo ratings yet
- Sound Propagation Through Media: Nachiketa Tiwari Indian Institute of Technology KanpurDocument17 pagesSound Propagation Through Media: Nachiketa Tiwari Indian Institute of Technology KanpurShiraz KhanNo ratings yet
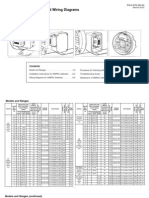
- Installation Instructions and Wiring Diagrams For All Models and RangesDocument8 pagesInstallation Instructions and Wiring Diagrams For All Models and RangesMaria MusyNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Cbse 12th 2019 Physics Answer Key Solution 55 2 1 by Govt PDFDocument21 pagesCbse 12th 2019 Physics Answer Key Solution 55 2 1 by Govt PDFbhabesh acharyaNo ratings yet
- RETROESCAVADORA Cat 446B SIS ELECTRICODocument2 pagesRETROESCAVADORA Cat 446B SIS ELECTRICOEDY75% (4)
- Site MapDocument1 pageSite MapDavid MucollariNo ratings yet
- BEDIA Level MonitoringDocument29 pagesBEDIA Level Monitoringm_najmanNo ratings yet
- CHAPTER VII Direct Current CircuitsDocument28 pagesCHAPTER VII Direct Current CircuitsNandya GuvitaNo ratings yet
- Protection Instrument TransformersDocument21 pagesProtection Instrument TransformersSyed Muzammil AliNo ratings yet
- Analysis and Design of Small Signal Low Frequency BJT AmplifiersDocument18 pagesAnalysis and Design of Small Signal Low Frequency BJT Amplifiersvenkiscribd444No ratings yet
- Manual Partes Millermatic 350Document43 pagesManual Partes Millermatic 350Miguel Angel Pavon CarbonellNo ratings yet
- Solar Panels:: 1-DefinitionDocument3 pagesSolar Panels:: 1-DefinitionLinda LinaNo ratings yet
- 1252Document3 pages1252Eong Huat Corporation Sdn BhdNo ratings yet
- DatasheetDocument4 pagesDatasheetGrupo EpufmNo ratings yet
- Infineon CYW43455 DataSheet v16 00 enDocument121 pagesInfineon CYW43455 DataSheet v16 00 enOlivier AgbenonwossiNo ratings yet
- X-Ray Technology - High Voltage Cable: Technical Information Notice - Hot and Cold Mill Applications, 2014/04Document3 pagesX-Ray Technology - High Voltage Cable: Technical Information Notice - Hot and Cold Mill Applications, 2014/04endangfarid hidayatNo ratings yet
- Samsung Ltf400hm03-V02 DatasheetDocument4 pagesSamsung Ltf400hm03-V02 Datasheetyamaha640No ratings yet
- 7.5 Tagging Conventions: Chapter 7 - C F I DDocument18 pages7.5 Tagging Conventions: Chapter 7 - C F I DN MlynNo ratings yet
- Bizhub C652 C552 Theory of OperationDocument400 pagesBizhub C652 C552 Theory of Operationtesla500No ratings yet
- Virtual-Circuit Networks: Frame Relay and ATMDocument24 pagesVirtual-Circuit Networks: Frame Relay and ATMdil_18100% (1)
- Transas AIS T-201 Operational ManualDocument70 pagesTransas AIS T-201 Operational ManualBhavin DoshiNo ratings yet
- NHD C12864LZ FSW FBW 3V3Document13 pagesNHD C12864LZ FSW FBW 3V3SrishtiNo ratings yet
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)