You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Tutorial Sim MechanicsDocument840 pagesTutorial Sim MechanicsHernan Gonzalez100% (4)
- BigMart Sale Prediction Using Machine LearningDocument2 pagesBigMart Sale Prediction Using Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Rocket Motor Design and Missile Flight Performance AnalysisDocument70 pagesRocket Motor Design and Missile Flight Performance Analysisbabak3316100% (1)
- Optical Communication Certification: Optical Communication Consultant (OC-C) Occ3 Release 1.2.0 Course OutlineDocument4 pagesOptical Communication Certification: Optical Communication Consultant (OC-C) Occ3 Release 1.2.0 Course OutlineAnonymous 1UM1sIIf0% (1)
- Structural Dynamic Analysis in Rocket Propulsion and Launch VehiclesDocument38 pagesStructural Dynamic Analysis in Rocket Propulsion and Launch VehiclesendoparasiteNo ratings yet
- Combined Ducted Rocket and Solid Fuel Ramjet CycleDocument8 pagesCombined Ducted Rocket and Solid Fuel Ramjet CycleendoparasiteNo ratings yet
- Supersonic Combustion Models ApplicationDocument26 pagesSupersonic Combustion Models ApplicationendoparasiteNo ratings yet
- My MainDocument29 pagesMy MainendoparasiteNo ratings yet
- Applsci 12 03356 v2Document9 pagesApplsci 12 03356 v2endoparasiteNo ratings yet
- Lanz On 2014Document12 pagesLanz On 2014endoparasiteNo ratings yet
- Microgravity Restart of Liquid Rocket Engine With Low Propellant ResidualsDocument26 pagesMicrogravity Restart of Liquid Rocket Engine With Low Propellant ResidualsendoparasiteNo ratings yet
- Thermal Design of A Ultra-Slim Notebook ComputerDocument7 pagesThermal Design of A Ultra-Slim Notebook ComputerendoparasiteNo ratings yet
- 2008 LeePS Saturated Flow Boiling HT in MCHSDocument18 pages2008 LeePS Saturated Flow Boiling HT in MCHSendoparasiteNo ratings yet
- Simscape UgDocument824 pagesSimscape Uggabo2008No ratings yet
- Multibody System Simulation With SimmechanicsDocument24 pagesMultibody System Simulation With SimmechanicsSonny Jason ANo ratings yet
- mueIEEE14 PDFDocument8 pagesmueIEEE14 PDFlalitha rNo ratings yet
- Moam - Info Simmechanics 5a322f221723dd6dcba0c75fDocument40 pagesMoam - Info Simmechanics 5a322f221723dd6dcba0c75fendoparasiteNo ratings yet
- Moam - Info Simmechanics 5a322f221723dd6dcba0c75fDocument40 pagesMoam - Info Simmechanics 5a322f221723dd6dcba0c75fendoparasiteNo ratings yet
- Experimental Investigation On Heat Transfer of Finned TubeDocument11 pagesExperimental Investigation On Heat Transfer of Finned TubeendoparasiteNo ratings yet
- Thermal Design of A Laptop Computer by A Personal ComputerDocument6 pagesThermal Design of A Laptop Computer by A Personal ComputerendoparasiteNo ratings yet
- Shape Optimization of Micro-Channel Heat Sink For Micro-Electronic CoolingDocument9 pagesShape Optimization of Micro-Channel Heat Sink For Micro-Electronic CoolingendoparasiteNo ratings yet
- ExtrapolationDocument13 pagesExtrapolationendoparasite0% (1)
- SBS Instalment Plans at 0% Markup : Alfalah Credit Cards Application FormDocument2 pagesSBS Instalment Plans at 0% Markup : Alfalah Credit Cards Application FormendoparasiteNo ratings yet
- High-Performance Heat Sinking For VLSI PDFDocument4 pagesHigh-Performance Heat Sinking For VLSI PDFendoparasiteNo ratings yet
- Interpolation, Smoothing, Extrapolation: What Is A Good Estimate For y For X 4.5, or X 15 ?Document22 pagesInterpolation, Smoothing, Extrapolation: What Is A Good Estimate For y For X 4.5, or X 15 ?Anita AndrianiNo ratings yet
- Ada 395503Document51 pagesAda 395503endoparasiteNo ratings yet
- Solving Nonlinear Governing Equations of Motion Using Matlab and Simulink in First Dynamics CourseDocument15 pagesSolving Nonlinear Governing Equations of Motion Using Matlab and Simulink in First Dynamics CourseendoparasiteNo ratings yet
- Part5 PDFDocument36 pagesPart5 PDFendoparasiteNo ratings yet
- CFD Analysis of A Kerosene Fuel Tank To Reduce Liquid SloshingDocument7 pagesCFD Analysis of A Kerosene Fuel Tank To Reduce Liquid SloshingendoparasiteNo ratings yet
- AMOM Lecture1 - FundamentalsDocument50 pagesAMOM Lecture1 - FundamentalsendoparasiteNo ratings yet
- Linearization of Non-Linear Ordinary Diff EquationDocument4 pagesLinearization of Non-Linear Ordinary Diff EquationendoparasiteNo ratings yet
- Esi Kts Dcu Diagnostics Brochure 8pp 2017Document5 pagesEsi Kts Dcu Diagnostics Brochure 8pp 2017ayazNo ratings yet
- Samsung Phones EnglishDocument25 pagesSamsung Phones EnglishJAYAKUMAR PvNo ratings yet
- MGT382-2 Coursework Specification (Individual Report) 2022-2023Document4 pagesMGT382-2 Coursework Specification (Individual Report) 2022-2023Darshil D ShethiaNo ratings yet
- CFN UgDocument2,133 pagesCFN Ugmonica100% (1)
- Solution Manual For Miller and Freunds P PDFDocument4 pagesSolution Manual For Miller and Freunds P PDFKuttyNo ratings yet
- Pepper FryDocument17 pagesPepper FryAditi GoenkaNo ratings yet
- Computer Science MCQs Practice Test 1 PDFDocument4 pagesComputer Science MCQs Practice Test 1 PDFPriyanka Paul0% (1)
- Kanban Excercise-1Document2 pagesKanban Excercise-1Viraj vjNo ratings yet
- Fireclass Overview Presentation PDFDocument34 pagesFireclass Overview Presentation PDFRamon Mendoza PantojaNo ratings yet
- Cisco 7841Document8 pagesCisco 7841bbpearlvnNo ratings yet
- Smart Drip Irrigation System For Sustainable Agriculture: July 2016Document5 pagesSmart Drip Irrigation System For Sustainable Agriculture: July 2016Shoaib NadeemNo ratings yet
- Intellectual Property Litigation Risk ReportDocument24 pagesIntellectual Property Litigation Risk ReportPankaj GargNo ratings yet
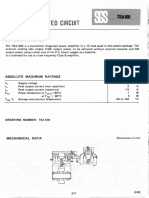
- Linear Integrated Circuit: 5W Audio AmplifierDocument5 pagesLinear Integrated Circuit: 5W Audio AmplifierVictor AsterdamNo ratings yet
- Electronics 1 - Laboratory ExercisesDocument63 pagesElectronics 1 - Laboratory Exercisesneo_rajaNo ratings yet
- Eleanor Oliphant Is Completely - Gail HoneymanDocument63 pagesEleanor Oliphant Is Completely - Gail HoneymanVicente Bergamini Puglia0% (2)
- Unit 1Document17 pagesUnit 1Ashish Singh RathoreNo ratings yet
- WT60 Spare PartsDocument11 pagesWT60 Spare PartsimedNo ratings yet
- IMBA Courses For Fall 2018Document1 pageIMBA Courses For Fall 2018Indrajeet BarveNo ratings yet
- Automated Billing SystemDocument24 pagesAutomated Billing SystemjamesNo ratings yet
- Study Informatics at School - WorldwideDocument67 pagesStudy Informatics at School - WorldwideMauricio Oyanader ArntzNo ratings yet
- Original Emmc Log Samsung p3100Document1 pageOriginal Emmc Log Samsung p3100Aan RamadhanNo ratings yet
- B12 - Motor Management Systems - EN (Web) PDFDocument41 pagesB12 - Motor Management Systems - EN (Web) PDFtongaiNo ratings yet
- Log-2023 11 18 04 58Document5 pagesLog-2023 11 18 04 58maikapaghubasanNo ratings yet
- 12791/Sc DNR SF Exp Sleeper Class (SL)Document2 pages12791/Sc DNR SF Exp Sleeper Class (SL)Rampravesh SinghNo ratings yet
- Syllabus Part Ii - Course Content HINT 730 Information Management in Healthcare Course DescriptionDocument14 pagesSyllabus Part Ii - Course Content HINT 730 Information Management in Healthcare Course DescriptionSarybell Del ValleNo ratings yet
- OPA380 OPA2380: Features DescriptionDocument23 pagesOPA380 OPA2380: Features DescriptionSunny SharmaNo ratings yet
- Final Exam 2022Document3 pagesFinal Exam 2022Ngọc Nguyễn BảoNo ratings yet
- Performance Analysis of Full-Adder Based On Domino Logic TechniqueDocument22 pagesPerformance Analysis of Full-Adder Based On Domino Logic TechniqueTechincal GaniNo ratings yet