You might also like
- Linux Paso A Paso - Instalar Ubuntu Junto A Windows 7Document24 pagesLinux Paso A Paso - Instalar Ubuntu Junto A Windows 7Abelardo CruzNo ratings yet
- U04. - ActividadesDocument2 pagesU04. - ActividadesTheDavid22No ratings yet
- Proyecto LedDocument43 pagesProyecto LedEnzo Nicola Sandoval FioriNo ratings yet
- Manual Arduino PDFDocument108 pagesManual Arduino PDFischjonatasNo ratings yet
- Examen 1-6Document11 pagesExamen 1-6Bryan CarbajalNo ratings yet
- Laboratorio 01Document11 pagesLaboratorio 01Sharol Milagros Puma FarfanNo ratings yet
- Fase 4 - YinethBalanta - 83Document11 pagesFase 4 - YinethBalanta - 83yineth balanta minaNo ratings yet
- Lab 09Document8 pagesLab 09L Martín M ChacónNo ratings yet
- Lista de Comandos CMD Windows 7Document8 pagesLista de Comandos CMD Windows 7Diego Castañares YapurNo ratings yet
- Manual Arrancadores Suaves ABB PDFDocument200 pagesManual Arrancadores Suaves ABB PDFoasr777100% (3)
- Calculo de Corto Circuito e ImpedanciasDocument34 pagesCalculo de Corto Circuito e ImpedanciasLeandro MarinNo ratings yet
- Well Control (Conceptos, Definiciones y Calculos)Document577 pagesWell Control (Conceptos, Definiciones y Calculos)javier cauna moralesNo ratings yet
- FraccionamientoDocument21 pagesFraccionamientoJorge Francisco Garabito ErquiciaNo ratings yet
- VPN - WireguardDocument3 pagesVPN - WireguardAlan GarcíaNo ratings yet
- Presentacion Microcontroladores 32bitsDocument41 pagesPresentacion Microcontroladores 32bitsDavid ChicaisaNo ratings yet
- Arquitectura de MicrocontroladoresDocument7 pagesArquitectura de MicrocontroladoresJaphet González BerronesNo ratings yet
- Prácticas ArduinoDocument12 pagesPrácticas ArduinoMartín Banciella OzoresNo ratings yet
- ArduinoDocument18 pagesArduinoMayra RiveraNo ratings yet
- Carrito Seguidor de LineaDocument22 pagesCarrito Seguidor de LineaAlejandro RodriguezNo ratings yet
- Empezando Con Arduino UNO - ComplubotDocument8 pagesEmpezando Con Arduino UNO - ComplubotKunimasa MusashiNo ratings yet
- Guia 10-Conceptos Basicos ElectronicaDocument3 pagesGuia 10-Conceptos Basicos ElectronicaDaniel GuevaraNo ratings yet
- Universoarduino - .15 Proyectos D - Jose Vicente Garlito AvilesDocument75 pagesUniversoarduino - .15 Proyectos D - Jose Vicente Garlito AvilesSantiago BerrocalNo ratings yet
- Informe1 - Enclavamiento Entradas y SalidasDocument14 pagesInforme1 - Enclavamiento Entradas y SalidasLex ViracochaNo ratings yet
- Arduino Como Controlador Lógico Programable (PLC)Document15 pagesArduino Como Controlador Lógico Programable (PLC)Kevin ReyesNo ratings yet
- Arduino Como PLC IndustrialDocument14 pagesArduino Como PLC Industrialemilio alcerroNo ratings yet
- Ejerciciosdearduinoresueltos 140806115433 Phpapp02 PDFDocument31 pagesEjerciciosdearduinoresueltos 140806115433 Phpapp02 PDFcarlagfloresNo ratings yet
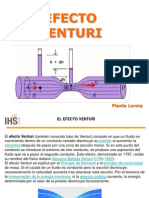
- Efecto VenturiDocument5 pagesEfecto VenturiautomotivableNo ratings yet
- El Potenciómetro y Arduino Juego de LedsDocument8 pagesEl Potenciómetro y Arduino Juego de Ledsmaria telloNo ratings yet
- DRONESDocument65 pagesDRONESEder GuzmánNo ratings yet
- TermoelectricidadDocument234 pagesTermoelectricidadDeym GómezNo ratings yet
- Sensor DispensadorDocument3 pagesSensor DispensadorMauro Rodriguez0% (1)
- LCD ArduinoDocument18 pagesLCD Arduinoluis narvaez ccoyoNo ratings yet
- Arduino Hardware para NovatosDocument6 pagesArduino Hardware para NovatosMauricio RojasNo ratings yet
- ArduinoDocument33 pagesArduinoDulce Lucía Lara GarcíaNo ratings yet
- Taller de Arduino Básico Clase 1Document44 pagesTaller de Arduino Básico Clase 1Alba Paola vitarNo ratings yet
- Curso de ArduinoDocument19 pagesCurso de ArduinoRosa Icela Carmona MalfavonNo ratings yet
- Guía para El Desarrollo Del Componente Práctico - Desarrollar El Componente Práctico Presencial PDFDocument26 pagesGuía para El Desarrollo Del Componente Práctico - Desarrollar El Componente Práctico Presencial PDFEdier OliverosNo ratings yet
- Sensor 1aDocument11 pagesSensor 1aYeral Belfort VilcaNo ratings yet
- Arduino Mega 2560Document10 pagesArduino Mega 2560Jesus QuicañoNo ratings yet
- Ebook Arduino Desde CeroDocument102 pagesEbook Arduino Desde CeroJose NavarreteNo ratings yet
- Arduino - Primeros Pasos Con Arduino PDFDocument138 pagesArduino - Primeros Pasos Con Arduino PDFcrisch2No ratings yet
- Sensor de Estacionamiento UltrasonidoDocument16 pagesSensor de Estacionamiento UltrasonidoRodrigo UruchiNo ratings yet
- Gestores de ArranqueDocument7 pagesGestores de ArranqueEdgarReyesFloresNo ratings yet
- Ejercicios de Arduino ResueltosDocument31 pagesEjercicios de Arduino ResueltoscoraztoNo ratings yet
- Electronica DigitalDocument9 pagesElectronica DigitalRoloNo ratings yet
- Introducción Pic18F4550Document13 pagesIntroducción Pic18F4550Lázaro López PuenteNo ratings yet
- ArduinoDocument4 pagesArduinoDiego MartinNo ratings yet
- Manual de Instalacion y Uso de Kit FUNDAMENTOS DE TRANSDUCTORES LAB-VOLTDocument7 pagesManual de Instalacion y Uso de Kit FUNDAMENTOS DE TRANSDUCTORES LAB-VOLTDaniel Rocha UgaldeNo ratings yet
- Ardu BlockDocument11 pagesArdu Blockmicky_vxNo ratings yet
- PPT-PC4 - Grupo 2Document30 pagesPPT-PC4 - Grupo 2Lisset FloresNo ratings yet
- Sistema Operativo Microcontroladores Pic RtosDocument22 pagesSistema Operativo Microcontroladores Pic RtosJean Carlos Herrera PérezNo ratings yet
- Arduino PDFDocument27 pagesArduino PDFgonzaloNo ratings yet
- Metodos para Trabajar Arduino-LabviewDocument4 pagesMetodos para Trabajar Arduino-LabviewJuan AcevedoNo ratings yet
- Practica 1 Encender y Apagar Un LEDDocument7 pagesPractica 1 Encender y Apagar Un LEDmario yanezNo ratings yet
- ArduinoDocument14 pagesArduinombomfim432No ratings yet
- Proyecto Seguidor Luz ArduinoDocument4 pagesProyecto Seguidor Luz ArduinoLuis AlvarezNo ratings yet
- Xilinx ISE TutorialDocument30 pagesXilinx ISE TutorialJavier Balam BasoraNo ratings yet
- Fpga JCHLDocument21 pagesFpga JCHLAntony Stip Flores TorresNo ratings yet
- Hoja de Trabajo - Taller 03 - DefinirDocument6 pagesHoja de Trabajo - Taller 03 - DefinirPercy Elvis Ccamaque ArotaipeNo ratings yet
- 4 - Mblock - ArduinoDocument1 page4 - Mblock - ArduinoJose Luis Prieto BenitoNo ratings yet
- BLOQUE 1 - Introducción A Arduino PDFDocument8 pagesBLOQUE 1 - Introducción A Arduino PDFLuciana SemorileNo ratings yet
- Las InterrupcionesDocument13 pagesLas InterrupcionesAnonymous H3E7i3YzydNo ratings yet
- InterrupcionesDocument7 pagesInterrupcionesChoco CakeNo ratings yet
- Tarea Consulta InterrupcionesDocument5 pagesTarea Consulta InterrupcionesESTEFANIA ALEJANDRA O�ATE MOYANo ratings yet
- Reloj Con InterrupcionesDocument3 pagesReloj Con InterrupcionesYeyis AlvaradoNo ratings yet
- Avance Seminario 3 Generacion de Energia PDFDocument33 pagesAvance Seminario 3 Generacion de Energia PDFJavier Ruiz ThorrensNo ratings yet
- Interrupciones ArduinoDocument12 pagesInterrupciones ArduinoJavier Ruiz ThorrensNo ratings yet
- Clasificacion Nacional Ocupaciones 2013 PDFDocument837 pagesClasificacion Nacional Ocupaciones 2013 PDFLiliana BeltranNo ratings yet
- PidDocument10 pagesPidFernandoi IdrovoNo ratings yet
- 6 Programa de Uso Eficiente y Ahorro de Energia PUEAE PDFDocument26 pages6 Programa de Uso Eficiente y Ahorro de Energia PUEAE PDFPedro Antonio PaniaguaNo ratings yet
- SimbologiaDocument16 pagesSimbologiageras34589No ratings yet
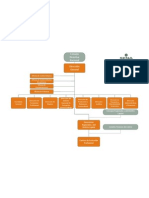
- OrganigramaDocument1 pageOrganigramaWilliam Fernando ValenciaNo ratings yet
- M 389Document66 pagesM 389Adrian MarquezNo ratings yet
- DFA InstrumentacionElectricaBasica PDFDocument70 pagesDFA InstrumentacionElectricaBasica PDFJavier Ruiz ThorrensNo ratings yet
- Seguidor de LineaDocument40 pagesSeguidor de LineaJavier Ruiz ThorrensNo ratings yet
- Teoría Del 555Document3 pagesTeoría Del 555Javier Ruiz ThorrensNo ratings yet
- Conexiones Trifasicas Trafos VDEDocument2 pagesConexiones Trifasicas Trafos VDEMiguel AngelNo ratings yet
- Modelamiento Maquina Sincrona Con Escalon UnitarioDocument7 pagesModelamiento Maquina Sincrona Con Escalon UnitarioJavier Ruiz ThorrensNo ratings yet
- PidDocument10 pagesPidFernandoi IdrovoNo ratings yet
- Avance Seminario 3 Generacion de Energia PDFDocument33 pagesAvance Seminario 3 Generacion de Energia PDFJavier Ruiz ThorrensNo ratings yet
- Altistart PDFDocument50 pagesAltistart PDFJavier Ruiz ThorrensNo ratings yet
- Configuración FC 300Document209 pagesConfiguración FC 300Andres DavidNo ratings yet
- FC 302 PDFDocument101 pagesFC 302 PDFJavier Ruiz ThorrensNo ratings yet
- TeoriaDocument43 pagesTeoriaDennis CestiNo ratings yet
- El Futuro Del AprendizajeDocument7 pagesEl Futuro Del AprendizajeJavier Ruiz ThorrensNo ratings yet
- Softstarters - Principios, Metodos y BeneficiosDocument101 pagesSoftstarters - Principios, Metodos y BeneficiosJavier Ruiz ThorrensNo ratings yet
- ProgramacionDocument66 pagesProgramacionJuniorChavezPeraltaNo ratings yet
- Diseño de PcbsDocument10 pagesDiseño de PcbsJavier Ruiz ThorrensNo ratings yet
- Diseño de PcbsDocument10 pagesDiseño de PcbsJavier Ruiz ThorrensNo ratings yet
- Info ProgDocument14 pagesInfo ProgormicanNo ratings yet
- Números Utilizados en Electronica DigitalDocument14 pagesNúmeros Utilizados en Electronica DigitalJavier Ruiz ThorrensNo ratings yet
- Fisica TiquiDocument39 pagesFisica Tiquitiqui_loquito280No ratings yet
- Unidad III Equipo 6Document10 pagesUnidad III Equipo 6Andry-6193No ratings yet
- Listado de Libros19-20 PDFDocument6 pagesListado de Libros19-20 PDFVictoria VmyburghNo ratings yet
- Manual Del CompresorDocument28 pagesManual Del Compresoraeduardo88No ratings yet
- Listo Acerca Del Padre en Las NeurosisDocument4 pagesListo Acerca Del Padre en Las NeurosisNELSON DANIELNo ratings yet
- Ejercicios FalaciasDocument2 pagesEjercicios FalaciasDiego Alfonso Ávila MorenoNo ratings yet
- La DislexiaDocument10 pagesLa DislexiaAlejandro DivasNo ratings yet
- Primera Practica Sensores 2021Document3 pagesPrimera Practica Sensores 2021Raúl QCNo ratings yet
- Partidos Wnba Storm Prime VideoDocument1 pagePartidos Wnba Storm Prime Videoaarevalo.1No ratings yet
- Thoreau - La Sucesion de Los Arboles ForestalesDocument54 pagesThoreau - La Sucesion de Los Arboles ForestalesdiegoklaresNo ratings yet
- Apunte Derecho de Sociedades JURGEN GROLLMUSDocument93 pagesApunte Derecho de Sociedades JURGEN GROLLMUSantonio.arancibia89No ratings yet
- Verbos Modales y MenuDocument3 pagesVerbos Modales y Menumakawin71773No ratings yet
- Anormalidades en Los Sistemas Electricos de PotenciaDocument4 pagesAnormalidades en Los Sistemas Electricos de Potenciajuan kovanenNo ratings yet
- 04 Eu A4 Aquarea Smart Cloud 17 050916-Ensp-1610111-R1Document2 pages04 Eu A4 Aquarea Smart Cloud 17 050916-Ensp-1610111-R1Pilar SanchezNo ratings yet
- Modelo Malcom BaldrigeDocument13 pagesModelo Malcom Baldrigekahhdjak sfkaNo ratings yet
- Tabla de Pociones y Objetos Alquimicos PDFDocument2 pagesTabla de Pociones y Objetos Alquimicos PDFCarlos Eduardo CANo ratings yet
- Actividad 6 Corriente ElctricaDocument1 pageActividad 6 Corriente ElctricaJAIR CRUZ CASTILLONo ratings yet
- Entrevista OVDocument6 pagesEntrevista OVKarla CoronelNo ratings yet
- 3-Guía-práctica-hoja-electrónica-UD3 SABDocument13 pages3-Guía-práctica-hoja-electrónica-UD3 SABElietNo ratings yet
- Reserva Paso Viejo CordobaDocument6 pagesReserva Paso Viejo Cordobahidrologia05No ratings yet
- Instituto Técnico de Exalumnos SalesianosDocument6 pagesInstituto Técnico de Exalumnos SalesianosAda Marta GarciaNo ratings yet
- Infografia Espinazo de La NocheDocument1 pageInfografia Espinazo de La Nocheana buelvas100% (2)
- Formulario Unico Impuesto Industria y Comercio RoviraDocument3 pagesFormulario Unico Impuesto Industria y Comercio Rovirapatricia sanchezNo ratings yet
- Impulsividad y Facetas de La PersonalidDocument11 pagesImpulsividad y Facetas de La Personalidluna pupunovichNo ratings yet
- Instrumentos de InvestigacionDocument11 pagesInstrumentos de InvestigacionMISAEL ESTEBAN ARCE LOPEZNo ratings yet
- Actividad #2 Foro Individual - Alvaro Javier Saballet RincónDocument7 pagesActividad #2 Foro Individual - Alvaro Javier Saballet RincónIvette Giselle LondoñoNo ratings yet
- Informe de PracticasDocument51 pagesInforme de PracticasErick Alexander Maldonado SenceNo ratings yet