You might also like
- Lecture 4 PDFDocument22 pagesLecture 4 PDFSparrowGospleGilbertNo ratings yet
- Nonlinear and Adaptive Control: Zhengtao DingDocument116 pagesNonlinear and Adaptive Control: Zhengtao DingAbdul Rehman TariqNo ratings yet
- Lecture Feedback LinearisationDocument22 pagesLecture Feedback LinearisationJason ChiangNo ratings yet
- 18.657: Mathematics of Machine Learning: S R LR LK KDocument9 pages18.657: Mathematics of Machine Learning: S R LR LK KBanupriya BalasubramanianNo ratings yet
- Sliding Mode Controller: Pierre Duysinx LTAS - Automotive Engineering Academic Year 2009-2010Document18 pagesSliding Mode Controller: Pierre Duysinx LTAS - Automotive Engineering Academic Year 2009-2010Kämÿ LīäNo ratings yet
- Nonlinear Control and Servo Systems (FRTN05)Document9 pagesNonlinear Control and Servo Systems (FRTN05)Abdesselem BoulkrouneNo ratings yet
- Feedback Linearization ExplainedDocument14 pagesFeedback Linearization Explainedabhilash v nairNo ratings yet
- Midterm NewDocument2 pagesMidterm NewahadmirNo ratings yet
- Feedback LinearizationDocument47 pagesFeedback LinearizationPTR77No ratings yet
- L LyapunovDocument52 pagesL Lyapunovkazem mokhtariNo ratings yet
- ZwanzigDocument3 pagesZwanzigmarcoNo ratings yet
- State SpaceDocument4 pagesState SpaceHai NguyenNo ratings yet
- Recitation 8: Continuous Optimization: For I End ForDocument12 pagesRecitation 8: Continuous Optimization: For I End ForWenjun HouNo ratings yet
- Considerations On Finite and Fixed Time ConvergenceDocument4 pagesConsiderations On Finite and Fixed Time ConvergenceAntonio EstradaNo ratings yet
- 1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukDocument36 pages1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukRomain LiNo ratings yet
- Mathematical PreliminariesDocument14 pagesMathematical PreliminariesSanchez Resendiz BonifacioNo ratings yet
- Differential Equations Lecture Note CH 11Document18 pagesDifferential Equations Lecture Note CH 11MinJae KimNo ratings yet
- MIT Feedback Linearization LectureDocument5 pagesMIT Feedback Linearization LectureJosé Ignacio Fierro TravoNo ratings yet
- Adaptive Control Design and AnalysisDocument45 pagesAdaptive Control Design and Analysishind90No ratings yet
- 320 HMWK9 SolnsDocument2 pages320 HMWK9 SolnsSushil BishnoiNo ratings yet
- 03 Lyapunov PDFDocument15 pages03 Lyapunov PDFHill HermitNo ratings yet
- Nonlinear Control Theory 2006: Off-Axis Circle CriterionDocument3 pagesNonlinear Control Theory 2006: Off-Axis Circle CriterionAli DurazNo ratings yet
- On the difference π (x) − li (x) : Christine LeeDocument41 pagesOn the difference π (x) − li (x) : Christine LeeKhokon GayenNo ratings yet
- EE364b Homework SolutionsDocument5 pagesEE364b Homework SolutionsShy PeachD100% (1)
- Lecture 6Document18 pagesLecture 6AlirezaNo ratings yet
- Inno2018 CE I MET4 LinearizationDocument9 pagesInno2018 CE I MET4 LinearizationinnoodiraNo ratings yet
- 06 Subgradients ScribedDocument5 pages06 Subgradients ScribedFaragNo ratings yet
- 7-Integral Control Handout PDFDocument15 pages7-Integral Control Handout PDFgiacomoNo ratings yet
- Solutions To The Exam in Nonlinear Control 2E1262, 2005-03-17Document3 pagesSolutions To The Exam in Nonlinear Control 2E1262, 2005-03-17Ali DurazNo ratings yet
- Engineering Analysis: Special Functions and Differential EquationsDocument19 pagesEngineering Analysis: Special Functions and Differential EquationsSuprioNo ratings yet
- Convolutional neural networks for text classification: Implementing forward, backward and gradient checkingDocument3 pagesConvolutional neural networks for text classification: Implementing forward, backward and gradient checkingYvonne Yifan ZhouNo ratings yet
- Lyapunov Stability Theory: Peter Al Hokayem and Eduardo Gallestey March 16, 2015Document15 pagesLyapunov Stability Theory: Peter Al Hokayem and Eduardo Gallestey March 16, 2015सुमित नेमाNo ratings yet
- HW 4Document3 pagesHW 4TaduxNo ratings yet
- Quadratic Mean Differentiability ExampleDocument5 pagesQuadratic Mean Differentiability ExamplemamurtazaNo ratings yet
- Lecture 7Document4 pagesLecture 7Iddresia MughalNo ratings yet
- Dynamical Systems 3Document19 pagesDynamical Systems 3Giozy OradeaNo ratings yet
- BIE TitleDocument20 pagesBIE TitleKavi YaNo ratings yet
- A Linearization: A.1 Functions of One VariableDocument8 pagesA Linearization: A.1 Functions of One VariableJayson NicdaoNo ratings yet
- Balanced TruncationDocument15 pagesBalanced TruncationVineet KoundalNo ratings yet
- Lec3 Convex Function ExerciseDocument4 pagesLec3 Convex Function Exercisezxm1485No ratings yet
- Discussion 2Document2 pagesDiscussion 2jef22No ratings yet
- Lecture 6Document3 pagesLecture 6Tấn Long LêNo ratings yet
- MathReview 2Document31 pagesMathReview 2resperadoNo ratings yet
- (Final)Document6 pages(Final)jeremia yusNo ratings yet
- Concave and Quasiconcave FunctionsDocument9 pagesConcave and Quasiconcave FunctionsceliusNo ratings yet
- Conformal Field NotesDocument7 pagesConformal Field NotesSrivatsan BalakrishnanNo ratings yet
- Lyapunov Stability Theorems: Definition 1 (Positive Definite Functions)Document21 pagesLyapunov Stability Theorems: Definition 1 (Positive Definite Functions)Jason ChiangNo ratings yet
- Notes 1 GammaFunctionDocument4 pagesNotes 1 GammaFunctionAtonu Tanvir HossainNo ratings yet
- TriangleDocument6 pagesTrianglePardeep SinghNo ratings yet
- Improper Integral1Document25 pagesImproper Integral1Lev DunNo ratings yet
- High Gain Observer: Consider The Following SystemDocument21 pagesHigh Gain Observer: Consider The Following Systemtidjani73No ratings yet
- Chapter 5: Feedback Systems:: Consider The SystemDocument14 pagesChapter 5: Feedback Systems:: Consider The SystemelectrotehnicaNo ratings yet
- Ma1505 CheatDocument4 pagesMa1505 CheatSouseiseki ChromeNo ratings yet
- Weighted Least Squares State EstimationDocument6 pagesWeighted Least Squares State EstimationAnonymous dJETDebGNo ratings yet
- The Dirac Delta Function Overview and Motivation: The Dirac Delta Function Is A Concept That Is UsefulDocument9 pagesThe Dirac Delta Function Overview and Motivation: The Dirac Delta Function Is A Concept That Is Usefulmatrixx105No ratings yet
- Differential and Integral Calculus 2 - Homework 3 SolutionDocument6 pagesDifferential and Integral Calculus 2 - Homework 3 SolutionDominikNo ratings yet
- Chapter1 Nonlinear Systems TempDocument8 pagesChapter1 Nonlinear Systems TempahmedNo ratings yet
- Availability of A Redundant System With Two Parallel Active ComponentsDocument3 pagesAvailability of A Redundant System With Two Parallel Active ComponentstheijesNo ratings yet
- 4 Phase Plane (Strogatz 6) : 4.1 Geometrical Approach: Phase PortraitsDocument10 pages4 Phase Plane (Strogatz 6) : 4.1 Geometrical Approach: Phase PortraitssalimNo ratings yet
- Richard Herrmann Fractional Calculus An Introduction For Physicists World Scientific 2011 PDFDocument274 pagesRichard Herrmann Fractional Calculus An Introduction For Physicists World Scientific 2011 PDFKgotsofalang Kayson NqhwakiNo ratings yet
- Business CaseDocument2 pagesBusiness CaseKgotsofalang Kayson NqhwakiNo ratings yet
- Sludge Thickening NotesDocument10 pagesSludge Thickening NotesKgotsofalang Kayson NqhwakiNo ratings yet
- 8-Lead Standard Small Outline PackageDocument1 page8-Lead Standard Small Outline PackageKgotsofalang Kayson NqhwakiNo ratings yet
- Black BoxDocument4 pagesBlack BoxKgotsofalang Kayson NqhwakiNo ratings yet
- Richard Herrmann Fractional Calculus An Introduction For Physicists World Scientific 2011 PDFDocument274 pagesRichard Herrmann Fractional Calculus An Introduction For Physicists World Scientific 2011 PDFKgotsofalang Kayson NqhwakiNo ratings yet
- GSM Relay User Manual PDFDocument6 pagesGSM Relay User Manual PDFKgotsofalang Kayson NqhwakiNo ratings yet
- GSM Relay User Manual PDFDocument6 pagesGSM Relay User Manual PDFKgotsofalang Kayson NqhwakiNo ratings yet
- CV Guidelines, Best of The Best University of Cape TownDocument2 pagesCV Guidelines, Best of The Best University of Cape TownKgotsofalang Kayson NqhwakiNo ratings yet
- Handbook of Model Predictive Control book overviewDocument5 pagesHandbook of Model Predictive Control book overviewKgotsofalang Kayson NqhwakiNo ratings yet
- Handbook of Model Predictive Control book overviewDocument5 pagesHandbook of Model Predictive Control book overviewKgotsofalang Kayson NqhwakiNo ratings yet
- EEE1000X Practical Training Report FormDocument1 pageEEE1000X Practical Training Report FormKgotsofalang Kayson NqhwakiNo ratings yet
- A New Approach To Implementing A PLC Based Model Predictive Controller For Application in Industrial Food ProcessesDocument14 pagesA New Approach To Implementing A PLC Based Model Predictive Controller For Application in Industrial Food ProcessesKgotsofalang Kayson NqhwakiNo ratings yet
- Letseng Diamonds Plant 2 DocumentationDocument14 pagesLetseng Diamonds Plant 2 DocumentationKgotsofalang Kayson NqhwakiNo ratings yet
- Crusher ControlDocument4 pagesCrusher ControlKgotsofalang Kayson NqhwakiNo ratings yet
- 2009 Solutions FluidsDocument2 pages2009 Solutions FluidsKgotsofalang Kayson NqhwakiNo ratings yet
- Nichols ChartDocument1 pageNichols ChartKgotsofalang Kayson NqhwakiNo ratings yet
- Refrigerant properties and thermodynamic processesDocument3 pagesRefrigerant properties and thermodynamic processesKgotsofalang Kayson NqhwakiNo ratings yet
- Inverse Nichols Chart ProblemDocument5 pagesInverse Nichols Chart ProblemKgotsofalang Kayson Nqhwaki0% (1)
- Maths HL Portfolio Type 11 (Corrected Version)Document22 pagesMaths HL Portfolio Type 11 (Corrected Version)Kgotsofalang Kayson NqhwakiNo ratings yet
- NumpybookDocument378 pagesNumpybookAlexej S. MedvedevNo ratings yet
- ITU ISUP Release Cause CodesDocument5 pagesITU ISUP Release Cause Codesdelgado08No ratings yet
- FH400 73158464 Pca-6.140Document431 pagesFH400 73158464 Pca-6.140IgorGorduz100% (1)
- Product Design Recommended Reading ListDocument3 pagesProduct Design Recommended Reading ListSai Prasath100% (1)
- Quotation 615-4078 BabulalDocument14 pagesQuotation 615-4078 Babulaldevrajan631No ratings yet
- Pipeline Tow MethodDocument25 pagesPipeline Tow MethodctrlaltdestroyNo ratings yet
- Developing Recycled PET Fiber for Concrete ReinforcementDocument8 pagesDeveloping Recycled PET Fiber for Concrete ReinforcementJunaid Ahmad100% (1)
- Modeling of The Effective Thermal Conductivity and Diffusivity of A Packed Bed With Stagnant FluidDocument9 pagesModeling of The Effective Thermal Conductivity and Diffusivity of A Packed Bed With Stagnant Fluidbasura12345No ratings yet
- 2009 Energy Storage-U.S. Department of EnergyDocument380 pages2009 Energy Storage-U.S. Department of EnergydiwhiteNo ratings yet
- CFS50 motor feedback installation instructionsDocument1 pageCFS50 motor feedback installation instructionsJavier AlzateNo ratings yet
- Sodium Citrate AUDocument3 pagesSodium Citrate AUKrishna OgotNo ratings yet
- JUS StandardsDocument28 pagesJUS StandardsgarejkaNo ratings yet
- 3 Phase Induction Motors Objective Questions With AnswersDocument3 pages3 Phase Induction Motors Objective Questions With AnswersMohan Raj0% (2)
- Supercharging: Superchargers & TurbochargersDocument11 pagesSupercharging: Superchargers & TurbochargersAkhil Here100% (1)
- Central GeothermalDocument48 pagesCentral GeothermalНиколай ШипочкиNo ratings yet
- Timing Chain Tensioner ResetDocument4 pagesTiming Chain Tensioner ResetHybrid RacingNo ratings yet
- 02 - Critical Customers Complains enDocument8 pages02 - Critical Customers Complains enKJDNKJZEF100% (1)
- Magnum 3904 DatasheetDocument3 pagesMagnum 3904 DatasheetbobNo ratings yet
- CUCM Intracluster Port Usage GuideDocument3 pagesCUCM Intracluster Port Usage GuideAbhinayMylavarapuNo ratings yet
- Bilge Alarm Monitor OMD 11Document22 pagesBilge Alarm Monitor OMD 11Lucian Iftemie100% (3)
- SteelKote EP ZN HS: High-Build Zinc-Rich Epoxy PrimerDocument3 pagesSteelKote EP ZN HS: High-Build Zinc-Rich Epoxy Primerprasanth cp100% (1)
- Sallyport MBI Bifold BrochureDocument6 pagesSallyport MBI Bifold BrochureameraldaherNo ratings yet
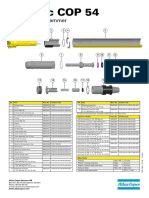
- 9853 1239 01 - COP 54 Service Poster - LOWDocument1 page9853 1239 01 - COP 54 Service Poster - LOWValourdos LukasNo ratings yet
- Micron Ezeprox Access Control KeypadDocument4 pagesMicron Ezeprox Access Control KeypadThuy VuNo ratings yet
- RCC BEAM DESIGN AND SERVICEABILITYDocument15 pagesRCC BEAM DESIGN AND SERVICEABILITYprashmceNo ratings yet
- Apache Oozie - A workflow scheduler to manage Hadoop jobsDocument5 pagesApache Oozie - A workflow scheduler to manage Hadoop jobsarjuncchaudharyNo ratings yet
- Smart Access 1105Document12 pagesSmart Access 1105Gerson Freire De Amorim FilhoNo ratings yet
- PVT Correlations McCain - ValkoDocument17 pagesPVT Correlations McCain - ValkoAlejandra Maleja RivasNo ratings yet
- EXPERIMENT 3a and 3b - Aluminum Content Via Redox and ColorimeterDocument13 pagesEXPERIMENT 3a and 3b - Aluminum Content Via Redox and ColorimeterTrupti soniNo ratings yet
- 1 s2.0 S0038080612000790 Main PDFDocument16 pages1 s2.0 S0038080612000790 Main PDFJuanSebastianGamezNo ratings yet