You might also like
- Casos de Loucura LivroDocument124 pagesCasos de Loucura LivroMalu RogenskiNo ratings yet
- JW1 - Projeto Executivos - Pontos Elétricos e Hidráulicos WilkeDocument6 pagesJW1 - Projeto Executivos - Pontos Elétricos e Hidráulicos WilkeJean silvaNo ratings yet
- Ufcd 0349Document57 pagesUfcd 0349António AlvesNo ratings yet
- 170 Motivos para Te Amar PituxinhoooDocument4 pages170 Motivos para Te Amar PituxinhoooSilvia Aros100% (1)
- Montando Um Descarregador de CapacitoresDocument4 pagesMontando Um Descarregador de CapacitoresriofelizNo ratings yet
- Manual MegatronDocument191 pagesManual MegatronfedsbmNo ratings yet
- Salmo 91 o Escudo de Proteao de Deus Peggy Joyce R PDFDocument284 pagesSalmo 91 o Escudo de Proteao de Deus Peggy Joyce R PDFdribeiro1No ratings yet
- Catalogo Tecnico-Ecoline 2.5 e SGT-Ed 05 Junho23 01 RD 1111Document174 pagesCatalogo Tecnico-Ecoline 2.5 e SGT-Ed 05 Junho23 01 RD 1111vendasNo ratings yet
- Azia, Má Digestão, Esofagite Ou GastriteDocument2 pagesAzia, Má Digestão, Esofagite Ou GastriteGbarielle BarrosNo ratings yet
- Prova Pism 2020 Dia - 1 Módulo - Iii SaúdeDocument20 pagesProva Pism 2020 Dia - 1 Módulo - Iii SaúdeGuilherme BaumgratzNo ratings yet
- Editora BAGAI - Filosofia AfricanaDocument110 pagesEditora BAGAI - Filosofia Africanadomingos beula fortunato100% (1)
- A Maturidade Na Perspectiva de Eclesiastes 12Document37 pagesA Maturidade Na Perspectiva de Eclesiastes 12ÁudioVisual PIBItaqueraNo ratings yet
- O Patrimônio Da Arquitetura Vernacular de Povos CaiçarasDocument2 pagesO Patrimônio Da Arquitetura Vernacular de Povos CaiçarasLucas ViniciusNo ratings yet
- Desenvolvimento de Um Dispositivo Detector de Vazamento de Gás Utilizando Arduino Como Interface de AutomaçãoDocument2 pagesDesenvolvimento de Um Dispositivo Detector de Vazamento de Gás Utilizando Arduino Como Interface de AutomaçãoLucas GodoiNo ratings yet
- Questo Es - Qui Mica Ba Sica - Parte 1Document8 pagesQuesto Es - Qui Mica Ba Sica - Parte 1Manoele DominicNo ratings yet
- A Influência Do Suporte Familiar Na Depressão em AdolescentesDocument5 pagesA Influência Do Suporte Familiar Na Depressão em AdolescentesisabelsardNo ratings yet
- Apostila de Desenho Geométrico 1 - IfALDocument36 pagesApostila de Desenho Geométrico 1 - IfALLuis OmenaNo ratings yet
- Transmissor Com Ba1404 e 2sc2458Document8 pagesTransmissor Com Ba1404 e 2sc2458carrlosalbertodossantossilvaNo ratings yet
- 20 Hábitos para Desenvolvimento Pessoal e ProfissionalDocument23 pages20 Hábitos para Desenvolvimento Pessoal e Profissionalanon_38127560100% (3)
- BriofitasDocument19 pagesBriofitasDalton Homisio100% (1)
- Aula 01 - Mestre Bálsamo - Curso para Instrutores de CentúriaDocument27 pagesAula 01 - Mestre Bálsamo - Curso para Instrutores de CentúriaDeivite Henrique100% (2)
- Aula 1 Fundamentos Da Ciência Dos MateriaisDocument42 pagesAula 1 Fundamentos Da Ciência Dos MateriaisFernando AlmeidaNo ratings yet
- BAUBEROT, Jean. A Favor de Uma Sociologia Intercultural e Histórica Da LaicidadeDocument20 pagesBAUBEROT, Jean. A Favor de Uma Sociologia Intercultural e Histórica Da LaicidadePaulimDNo ratings yet
- Certificado de Qualidade - Oyamota - Nf.1852 - 02.09.2016Document5 pagesCertificado de Qualidade - Oyamota - Nf.1852 - 02.09.2016MauroDosSantosCostaNo ratings yet
- A Sua Maneira (Simplificada)Document1 pageA Sua Maneira (Simplificada)Giovany Pereira ValleNo ratings yet
- A Industrialização Brasileira Após Anos 90 Até A ContemporaneidadeDocument2 pagesA Industrialização Brasileira Após Anos 90 Até A ContemporaneidadeJúllia Fagundes AmaralNo ratings yet
- Sebenta TotalDocument195 pagesSebenta Totaldabysk100% (3)
- Astrologia Cristã - William LillyDocument906 pagesAstrologia Cristã - William Lillyfilipi2000100% (11)
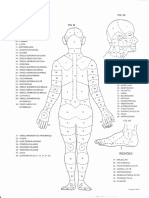
- Topografia Corpo HumanoDocument2 pagesTopografia Corpo Humanoestevaocanan100% (9)
- Questoes Revisao Histologia BasicaDocument20 pagesQuestoes Revisao Histologia BasicaAlessandra IngridNo ratings yet