You might also like
- De BounceDocument35 pagesDe BounceAndres SuarezNo ratings yet
- LCD ControllerDocument5 pagesLCD ControllerAndres SuarezNo ratings yet
- ON Vol.: No. 4, July 2965Document3 pagesON Vol.: No. 4, July 2965Andres SuarezNo ratings yet
- Computers and Mathematics With Applications: Patrick Ciarlet JRDocument20 pagesComputers and Mathematics With Applications: Patrick Ciarlet JRAndres SuarezNo ratings yet
- Sonia Mart Inez: B-DRASS Seminar, The Boeing Company May 20, 2009, Huntington Beach, CADocument16 pagesSonia Mart Inez: B-DRASS Seminar, The Boeing Company May 20, 2009, Huntington Beach, CAAndres SuarezNo ratings yet
- 8254 Programmable Interval Timer (Andres Suarez-201210937)Document21 pages8254 Programmable Interval Timer (Andres Suarez-201210937)Andres SuarezNo ratings yet
- Codec de AudioDocument5 pagesCodec de AudioAndres SuarezNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Joint and Combined VariationDocument16 pagesJoint and Combined VariationNikki SarmientoNo ratings yet
- Graphs LectureDocument23 pagesGraphs LectureReina Chiara Garcia MagcamitNo ratings yet
- Mad111 Chap 4Document145 pagesMad111 Chap 4Minh VuNo ratings yet
- Topic For The Class:: Knowledge and ReasoningDocument41 pagesTopic For The Class:: Knowledge and ReasoningVamshidhar ReddyNo ratings yet
- D1 - Review Excerise 2Document46 pagesD1 - Review Excerise 2Ahmed NurulNo ratings yet
- Module Handbook - S1 Stochastic CalculusDocument3 pagesModule Handbook - S1 Stochastic CalculusMuhammad FatkhurrohmanNo ratings yet
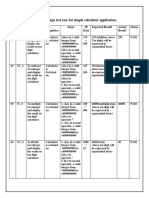
- Experiment No .3-Design Test Case For Simple Calculator ApplicationDocument2 pagesExperiment No .3-Design Test Case For Simple Calculator ApplicationAbrar NadafNo ratings yet
- Chapter 1Document27 pagesChapter 1Mainul Islam 312No ratings yet
- Unit V:: Design and Analysis of AlgorithmsDocument7 pagesUnit V:: Design and Analysis of AlgorithmsSairam N100% (1)
- SCHOOL REPORT Mid-Year Year 10 VU Anh Ha 2023-01-19Document11 pagesSCHOOL REPORT Mid-Year Year 10 VU Anh Ha 2023-01-19Vân Gỗ Anpro SànNo ratings yet
- Stat - 992Document16 pagesStat - 992Siam ShawNo ratings yet
- DLL Grade 8Document7 pagesDLL Grade 8Cherose LumboNo ratings yet
- Some Non-Perturbative Semi-Classical Methods in Quantum Field TheoryDocument87 pagesSome Non-Perturbative Semi-Classical Methods in Quantum Field TheoryRui PuNo ratings yet
- NMSA334 Stochastic Processes 1Document76 pagesNMSA334 Stochastic Processes 1Dionisio UssacaNo ratings yet
- Worksheet 1.1 CirclesDocument2 pagesWorksheet 1.1 CirclesJeypi CeronNo ratings yet
- Action Plan in Mathematics PDF FreeDocument3 pagesAction Plan in Mathematics PDF FreeMary June DemontevwrdeNo ratings yet
- Math WorksheetsDocument18 pagesMath WorksheetsReysa m.duatinNo ratings yet
- (Worksheet 7.1) - (Chapter Coordinate Geometry)Document10 pages(Worksheet 7.1) - (Chapter Coordinate Geometry)Praneel Khotre100% (1)
- 2020june ppr2 Marking SchemeDocument34 pages2020june ppr2 Marking SchemeTanakaNo ratings yet
- Date: Experiment # 2 Roll No.:: Follow InstructionsDocument3 pagesDate: Experiment # 2 Roll No.:: Follow InstructionsRasheed ShahNo ratings yet
- Basic Business Statistics: 12 EditionDocument35 pagesBasic Business Statistics: 12 EditionMustakim Mehmud TohaNo ratings yet
- Image Analysis and Markov Random Fields (MRFS)Document22 pagesImage Analysis and Markov Random Fields (MRFS)divar_ritzalNo ratings yet
- Action Research Project ProposalDocument2 pagesAction Research Project Proposalapi-245618218100% (2)
- IFEM Ch01Document19 pagesIFEM Ch01Sahir AbasNo ratings yet
- AIM:Write A Program To Convert A Decimal Number Into Binary EqualentDocument27 pagesAIM:Write A Program To Convert A Decimal Number Into Binary EqualentAkashNo ratings yet
- Maron CalculusDocument453 pagesMaron CalculusArkadebSengupta100% (4)
- Power System Control (EE-4)Document22 pagesPower System Control (EE-4)Abhishek RoshanNo ratings yet
- Lines in R3Document6 pagesLines in R3jamesNo ratings yet
- Definition and Equation of A CircleDocument47 pagesDefinition and Equation of A Circlesaira claire cayetanoNo ratings yet
- Calculus IIIDocument3 pagesCalculus IIIareeba malikNo ratings yet