You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Engineering MathsDocument84 pagesEngineering MathsNagaraju SambuNo ratings yet
- Matrix Analysis (Rajendra Bathia - Springer)Document360 pagesMatrix Analysis (Rajendra Bathia - Springer)André Rojas100% (4)
- Dynamic Mode Decomposition: Data-Driven Modeling of Complex SystemsDocument241 pagesDynamic Mode Decomposition: Data-Driven Modeling of Complex Systemszilyn50% (2)
- List of Companies Confirmed - VacanciesDocument7 pagesList of Companies Confirmed - VacanciesFizaFiyNo ratings yet
- MRL FormDocument4 pagesMRL FormaunngageNo ratings yet
- FYP Proporsal AfterDocument25 pagesFYP Proporsal AfteraunngageNo ratings yet
- Thesis Edited 18716 - WordsDocument56 pagesThesis Edited 18716 - WordsaunngageNo ratings yet
- Chapter 1Document113 pagesChapter 1aunngageNo ratings yet
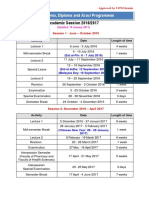
- Pre-Diploma, Diploma and Asasi Programmes: Academic Session 2016/2017Document2 pagesPre-Diploma, Diploma and Asasi Programmes: Academic Session 2016/2017MhdNajmi97No ratings yet
- Materials Design6042010Document24 pagesMaterials Design6042010aunngageNo ratings yet
- Chapter 2 MHIDocument40 pagesChapter 2 MHIaunngageNo ratings yet
- Cost OshaDocument19 pagesCost OshaaunngageNo ratings yet
- Introduction Into RoboticsDocument33 pagesIntroduction Into Roboticsaunngage50% (2)
- Welding Eng Lab GuidesDocument15 pagesWelding Eng Lab Guideshilmiguyz91No ratings yet
- I Ma DuDocument1 pageI Ma DuaunngageNo ratings yet
- FYP 1 Presentation - SYED JDocument19 pagesFYP 1 Presentation - SYED JaunngageNo ratings yet
- Fyp DawsDocument16 pagesFyp DawsaunngageNo ratings yet
- A Chebyshev Matrix Method For The Spatial Modes ofDocument16 pagesA Chebyshev Matrix Method For The Spatial Modes ofHiba MansoorNo ratings yet
- Controllability and Observability ExplainedDocument9 pagesControllability and Observability Explainedjohn johnsonNo ratings yet
- 1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukDocument26 pages1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukvatnikNo ratings yet
- B.Tech Mechanical Engineering Curriculum and Syllabus at Kalasalingam UniversityDocument165 pagesB.Tech Mechanical Engineering Curriculum and Syllabus at Kalasalingam UniversityVignesh RamakrishnanNo ratings yet
- Floorplanning AND Placement 16: Key Terms and ConceptsDocument32 pagesFloorplanning AND Placement 16: Key Terms and ConceptsVivek100% (2)
- Introduction To Matrix Analysis: Second EditionDocument25 pagesIntroduction To Matrix Analysis: Second EditionzakariaNo ratings yet
- Buckling Analysis With FEA: Machine DesignDocument7 pagesBuckling Analysis With FEA: Machine DesignCemGülerNo ratings yet
- Math 3073: Notes: Trevor H. Jones January 5, 2010Document39 pagesMath 3073: Notes: Trevor H. Jones January 5, 2010SangEun HanNo ratings yet
- MTH501 Linear Algebra FAQsDocument7 pagesMTH501 Linear Algebra FAQsLightening LampNo ratings yet
- Euclidean Vector SpacesDocument88 pagesEuclidean Vector SpacesRezif SugandiNo ratings yet
- Jan15 QnPapersDocument11 pagesJan15 QnPapersVigneshwaran KannanNo ratings yet
- Language Fundamentals: Entering CommandsDocument109 pagesLanguage Fundamentals: Entering CommandsNor ManNo ratings yet
- Exercises AlgebraDocument22 pagesExercises AlgebraTien KimNo ratings yet
- Grad 2028Document99 pagesGrad 2028Marilyn CitadelNo ratings yet
- Math 120 FinalDocument13 pagesMath 120 FinalAtif ZaheerNo ratings yet
- Pole Placement Design - MATLABDocument1 pagePole Placement Design - MATLABManavarthi Ravitej100% (1)
- TUHH ECTS format for "MEMDocument1 pageTUHH ECTS format for "MEMRajan SinghNo ratings yet
- Analysis of Agricultural Soil PH Using Digital Image ProcessingDocument5 pagesAnalysis of Agricultural Soil PH Using Digital Image ProcessingBTSarmy RinaNo ratings yet
- Hobsonajjustthemaths20021296smcetp PDFDocument1,296 pagesHobsonajjustthemaths20021296smcetp PDFAIvan DCam G0% (1)
- ECE 495N Lecture 8 - Schrodinger Equation and Finite DifferenceDocument4 pagesECE 495N Lecture 8 - Schrodinger Equation and Finite DifferenceTheodore ChandraNo ratings yet
- 1 A Discriminative Model For Age Invariant Face RecognitionDocument10 pages1 A Discriminative Model For Age Invariant Face Recognitionvenkata rao RampayNo ratings yet
- MATLAB Basics Tutorial: Tips About Basics Hardware Index NextDocument17 pagesMATLAB Basics Tutorial: Tips About Basics Hardware Index NextAhtisham195No ratings yet
- LAB01 - PART - I - BasicsDocument30 pagesLAB01 - PART - I - Basicshai zhangNo ratings yet
- Mathematical Methods of Physics II: Solutions and Hints To Selected ExercisesDocument136 pagesMathematical Methods of Physics II: Solutions and Hints To Selected ExercisesaaaaaaaaaaaaaaaaaaaNo ratings yet
- Spectra of Graphs Resulting From Various Graph Operations and Products: A SurveyDocument21 pagesSpectra of Graphs Resulting From Various Graph Operations and Products: A Surveymla01No ratings yet
- Calicut University B.Sc. Mathematics SyllabusDocument62 pagesCalicut University B.Sc. Mathematics SyllabusFaru Shibi0% (1)
- 18 Mat 112Document2 pages18 Mat 112ChintuNo ratings yet