You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- TiaDocument5 pagesTiaPiotrekBzdręgaNo ratings yet
- PR 01 Git Gerrit 1.0Document164 pagesPR 01 Git Gerrit 1.0PiotrekBzdręgaNo ratings yet
- Using WireShark For Ethernet DiagnosticsDocument16 pagesUsing WireShark For Ethernet DiagnosticsPiotrekBzdręgaNo ratings yet
- Siemens TCP Ip Ethernet ManualDocument103 pagesSiemens TCP Ip Ethernet ManualJonathan CheuquianNo ratings yet
- Modbus Poll ManualDocument39 pagesModbus Poll Manualgamh1320% (1)
- ModbusProfibus PDFDocument64 pagesModbusProfibus PDFPiotrekBzdręgaNo ratings yet
- Github Com Catchorg Catch2 Blob Master Docs Tutorial MD TopDocument6 pagesGithub Com Catchorg Catch2 Blob Master Docs Tutorial MD TopPiotrekBzdręgaNo ratings yet
- Basics of AC Drives 2Document20 pagesBasics of AC Drives 2kodandaramNo ratings yet
- Smokjet: RZ - Smokjet - 0105 - Ifr - Uk - Indd 1Document14 pagesSmokjet: RZ - Smokjet - 0105 - Ifr - Uk - Indd 1PiotrekBzdręgaNo ratings yet
- Github Com Catchorg Catch2 Blob Master Docs Tutorial MD TopDocument36 pagesGithub Com Catchorg Catch2 Blob Master Docs Tutorial MD TopPiotrekBzdręgaNo ratings yet
- HX711 Avia SemiconductorDocument9 pagesHX711 Avia SemiconductorAnjar Bangsa MimpiNo ratings yet
- Hmi enDocument34 pagesHmi enPiotrekBzdręgaNo ratings yet
- GXDocument74 pagesGXPiotrekBzdręgaNo ratings yet
- Github Com Catchorg Catch2 Blob Master Docs Tutorial MD TopDocument6 pagesGithub Com Catchorg Catch2 Blob Master Docs Tutorial MD TopPiotrekBzdręgaNo ratings yet
- LGF DOC V3 0 1 enDocument101 pagesLGF DOC V3 0 1 enPiotrekBzdręgaNo ratings yet
- Penguin Readers Level 6 Les MiserablesDocument75 pagesPenguin Readers Level 6 Les Miserablesmalik jozsef zoltanNo ratings yet
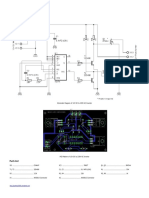
- 12V DC To 230V AC Inverter: Parts ListDocument1 page12V DC To 230V AC Inverter: Parts ListPiotrekBzdręgaNo ratings yet
- 16912411Document132 pages16912411PiotrekBzdręgaNo ratings yet
- S7-1200 Modbus-RTU DOC V20 enDocument10 pagesS7-1200 Modbus-RTU DOC V20 enPiotrekBzdręgaNo ratings yet
- FL Switch SMN 8tx-PnDocument154 pagesFL Switch SMN 8tx-PnPiotrekBzdręgaNo ratings yet
- SIMATIC - Programming Guide S7-1200 and 1500 (3 - 2017)Document120 pagesSIMATIC - Programming Guide S7-1200 and 1500 (3 - 2017)Jorge_Andril_5370100% (3)
- Festo Basic PneumaticDocument274 pagesFesto Basic Pneumaticshellafaye100% (15)
- PlantSimulation Step by Step ENU Tcm1224 143387Document618 pagesPlantSimulation Step by Step ENU Tcm1224 143387Oswaldo Neave100% (1)
- Opc UaDocument12 pagesOpc UaHenry CochaNo ratings yet
- nRF24L01 Product Specification v2 0Document74 pagesnRF24L01 Product Specification v2 0Pablo Exequiel Covarrubias SaavedraNo ratings yet
- Siemens Simatic S7Document99 pagesSiemens Simatic S7PiotrekBzdręgaNo ratings yet
- PLC ProgrammingDocument116 pagesPLC ProgrammingVali Ene100% (4)
- Datasheet L298Document13 pagesDatasheet L298Anugera DewanggaNo ratings yet
- Arduino Booklet PDFDocument45 pagesArduino Booklet PDFgpt1708No ratings yet
- S7-1200 MoveAfterEvent V1d0 enDocument10 pagesS7-1200 MoveAfterEvent V1d0 enPiotrekBzdręgaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- YSM Series Air Handling UnitsDocument20 pagesYSM Series Air Handling UnitsVincent Aarón RodríguezNo ratings yet
- Automatic Drainage Cleaning Machine Run Through Solar PowerDocument8 pagesAutomatic Drainage Cleaning Machine Run Through Solar Powervikalpsharma96No ratings yet
- MAAE3300 Module 1 Part 1of2Document7 pagesMAAE3300 Module 1 Part 1of2sebastiansureshNo ratings yet
- SP-60-27 (LV Bus Ducts)Document6 pagesSP-60-27 (LV Bus Ducts)Hadi MoosaviNo ratings yet
- GE Aquamite EDRDocument3 pagesGE Aquamite EDRMandla KeiNo ratings yet
- 7 - DirectionvalvesDocument48 pages7 - DirectionvalvesMohamed ZahranNo ratings yet
- JBL Sub140p ManualDocument5 pagesJBL Sub140p ManualDiff DonNo ratings yet
- Duracure WBC & WBWDocument2 pagesDuracure WBC & WBWAman SahadeoNo ratings yet
- Maintenance Manual - Scissor LiftsDocument103 pagesMaintenance Manual - Scissor LiftsStar SealNo ratings yet
- ISC Physics Sample Paper 1Document9 pagesISC Physics Sample Paper 1amit77999No ratings yet
- Meter L&TDocument12 pagesMeter L&TnenusakNo ratings yet
- Ms6001b Operation DescriptionDocument53 pagesMs6001b Operation Descriptionprasad503486% (7)
- Ecoair Brochure PDFDocument12 pagesEcoair Brochure PDFPunks Pacerot EcoNo ratings yet
- Water Electrolysis For Hydrogen Production (Pasquale Cavaliere) (Z-Library)Document852 pagesWater Electrolysis For Hydrogen Production (Pasquale Cavaliere) (Z-Library)irisqu2No ratings yet
- BijoyGuide 2003Document17 pagesBijoyGuide 2003Mb TarekNo ratings yet
- Water Cycle Webquest2Document6 pagesWater Cycle Webquest2api-330090206No ratings yet
- Hyosung Sf50 Prima 2007 Part CatalogueDocument76 pagesHyosung Sf50 Prima 2007 Part CatalogueRobert 70% (1)
- Design Basis Memorandum - Mechanical Equipment and SystemsDocument26 pagesDesign Basis Memorandum - Mechanical Equipment and SystemsLuojisi Cil50% (2)
- 01 Three-Phase Diode Rectifiers AsmarDocument65 pages01 Three-Phase Diode Rectifiers AsmarVenkedesh RNo ratings yet
- Maintenance Guide: SINO Series Electrolyte AnalyzerDocument18 pagesMaintenance Guide: SINO Series Electrolyte AnalyzerRoniiNo ratings yet
- Semester II Shivaji University Kolhapur S. E. Electrical II Power ElectronicsDocument2 pagesSemester II Shivaji University Kolhapur S. E. Electrical II Power ElectronicsAnonymous q6cOT5XgXANo ratings yet
- FINAL TEST 1 K 2Document4 pagesFINAL TEST 1 K 2Nguyen Cuong100% (1)
- Effect of Electricity Shortage On Daily Routine in PakistanDocument10 pagesEffect of Electricity Shortage On Daily Routine in PakistanXin kitzzNo ratings yet
- 1997 - Veletsos Et Al - Dynamics of Solid Containing TanksDocument93 pages1997 - Veletsos Et Al - Dynamics of Solid Containing TanksmahdiebNo ratings yet
- Kawasaki FH451V-FH721V 2003 Service Manual PDFDocument153 pagesKawasaki FH451V-FH721V 2003 Service Manual PDFBrianCookNo ratings yet
- Ph8151 Question BankDocument21 pagesPh8151 Question BankIPRNo ratings yet
- Grid1 - Untitled - gr1S - CompleteRapportDocument3 pagesGrid1 - Untitled - gr1S - CompleteRapportKhaoula BenNo ratings yet
- Influence MN S Properties Cast IronDocument14 pagesInfluence MN S Properties Cast Ironvivek1312No ratings yet
- Cost Benefit Analysis of Adopting Solar Energy PumpsDocument4 pagesCost Benefit Analysis of Adopting Solar Energy PumpsChaRie Mae FernandezNo ratings yet
- Modeling and Parameter Estimation of Synchronous Machine - GR LekhemaDocument33 pagesModeling and Parameter Estimation of Synchronous Machine - GR LekhemaRatoka LekhemaNo ratings yet