You might also like
- Performance Analysis of Centrifugal Pump's Impeller of Low Specific Speed For Various Designs and Validation of Result by CFDDocument7 pagesPerformance Analysis of Centrifugal Pump's Impeller of Low Specific Speed For Various Designs and Validation of Result by CFDIDESNo ratings yet
- Dynamic Modelling PRVDocument10 pagesDynamic Modelling PRVErick Renzo Hidalgo OrtegaNo ratings yet
- Relief Valve Reaction Force CompilationDocument7 pagesRelief Valve Reaction Force CompilationnaeandNo ratings yet
- Slide Presentation - Chapter 3Document48 pagesSlide Presentation - Chapter 3Kapil KaviNo ratings yet
- Modelling A Pneumatic Servo Positioning System With FrictionDocument6 pagesModelling A Pneumatic Servo Positioning System With FrictionIgor FernandesNo ratings yet
- Energy Analysis of Closed Systems Study Guide in Powerpoint: To AccompanyDocument68 pagesEnergy Analysis of Closed Systems Study Guide in Powerpoint: To AccompanyChuck NorrisNo ratings yet
- VIV Prediction of A Truss Spar Pull-Tube Array Using CFD: A Platform For InnovationDocument13 pagesVIV Prediction of A Truss Spar Pull-Tube Array Using CFD: A Platform For InnovationAmanda MartinezNo ratings yet
- 1D Model To Predict Ejector Performance at Critical and Sub-Critical Operation in The Refrigeration SystemDocument7 pages1D Model To Predict Ejector Performance at Critical and Sub-Critical Operation in The Refrigeration Systemaff123051No ratings yet
- IARE EAD Lecture NotesDocument130 pagesIARE EAD Lecture NotesTomble BravoNo ratings yet
- The Fluidyne EngineDocument6 pagesThe Fluidyne EngineJohn Hernan Diaz ForeroNo ratings yet
- CH2801 C5 Characteristics of Centrifugal PumpDocument11 pagesCH2801 C5 Characteristics of Centrifugal PumpRaj MahendranNo ratings yet
- Transient DS MillerDocument35 pagesTransient DS MillerCandice HuffmanNo ratings yet
- Lecture 17-18: Illustrations - 1: Nozzles, Diffusers, Turbines, CompressorsDocument24 pagesLecture 17-18: Illustrations - 1: Nozzles, Diffusers, Turbines, Compressorsmanish_aspiringNo ratings yet
- Compute (A) The Flow in Each Pipe and (B) The Pressures at Points A and BDocument2 pagesCompute (A) The Flow in Each Pipe and (B) The Pressures at Points A and BPenuel G. BantogNo ratings yet
- Optimal Control and Performance of Variable Stiffness Devices For Structural ControlDocument6 pagesOptimal Control and Performance of Variable Stiffness Devices For Structural ControlTimotius Yonathan SunarsaNo ratings yet
- Bernoulli's Equation PNDocument4 pagesBernoulli's Equation PNafifa100% (1)
- Chapter 1 - Part 1Document13 pagesChapter 1 - Part 1حسن كميت hassankomeit lNo ratings yet
- Wing Lab ReportDocument17 pagesWing Lab ReportAlessandra PreliczNo ratings yet
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocument13 pagesModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseNo ratings yet
- Renewable Energy: Paresh Halder, Abdus Samad, Dominique TH EveninDocument13 pagesRenewable Energy: Paresh Halder, Abdus Samad, Dominique TH EveninAlmir RodriguesNo ratings yet
- Energy Analysis of Pipes and FittingsDocument4 pagesEnergy Analysis of Pipes and FittingsEymann JalaNo ratings yet
- Energy Analysis of Closed Systems Study Guide in Powerpoint: To AccompanyDocument60 pagesEnergy Analysis of Closed Systems Study Guide in Powerpoint: To AccompanyFaisal MujibNo ratings yet
- TheFuelRateIndicator Bosch66Document22 pagesTheFuelRateIndicator Bosch66ennioNo ratings yet
- Pseudo-Steady-State Quasi-Steady-State)Document12 pagesPseudo-Steady-State Quasi-Steady-State)saleem ahmadNo ratings yet
- PD Assi 2Document8 pagesPD Assi 2Abhay RajputNo ratings yet
- Closed and Energy System-For STDDocument60 pagesClosed and Energy System-For STDBisma khanNo ratings yet
- Energy Conversion and Management: Riccardo Amirante, Elia Distaso, Paolo TamburranoDocument12 pagesEnergy Conversion and Management: Riccardo Amirante, Elia Distaso, Paolo TamburranobrgrNo ratings yet
- Questions For Stress AnalysisDocument3 pagesQuestions For Stress AnalysisSunday PaulNo ratings yet
- CFD Modeling of Corrugated Flexible PipeDocument10 pagesCFD Modeling of Corrugated Flexible PipeSaad AhmedNo ratings yet
- Transport Phenomena - 7 - Conservation of Momentum3Document34 pagesTransport Phenomena - 7 - Conservation of Momentum3HareritamNo ratings yet
- DesignRules For HighDampingDocument8 pagesDesignRules For HighDampingRajesh MalikNo ratings yet
- Study of Multi-Stage Centrifugal Pump Guide Vanes in A Package of Hydrodynamic Simulating STAR CCM+Document11 pagesStudy of Multi-Stage Centrifugal Pump Guide Vanes in A Package of Hydrodynamic Simulating STAR CCM+Alexander Aristizábal PeñalozaNo ratings yet
- Identification of Francis Turbine Helical Vortex Rope Excitation by CFD and Resonance Simulation With The Hydraulic SystemDocument17 pagesIdentification of Francis Turbine Helical Vortex Rope Excitation by CFD and Resonance Simulation With The Hydraulic SystemRanjeetTwaynaNo ratings yet
- Lecture Thermo Week 10ADocument19 pagesLecture Thermo Week 10AMUHAMMAD HUZAIFANo ratings yet
- Ring ValveDocument7 pagesRing Valvesayansaesue2514No ratings yet
- Measurement of The Fluid Flow Load On A Globe Valve Stem Under Various Cavitation ConditionsDocument16 pagesMeasurement of The Fluid Flow Load On A Globe Valve Stem Under Various Cavitation ConditionsbayuNo ratings yet
- RENGJ Volume 17 Issue 5 Pages 1 14Document14 pagesRENGJ Volume 17 Issue 5 Pages 1 14Khang TruongNo ratings yet
- An Active-Clamp Push-Pull Converter For Battery Sourcing ApplicationsDocument9 pagesAn Active-Clamp Push-Pull Converter For Battery Sourcing ApplicationsYury KrivtsovNo ratings yet
- Numerical Modelling of Cavitation TR InterressantDocument54 pagesNumerical Modelling of Cavitation TR Interressantkanfoudih2855No ratings yet
- 1-Sheet 4 Measure AnswerDocument17 pages1-Sheet 4 Measure AnswerBahaa EmadNo ratings yet
- Anteproyecto Equipo 8Document23 pagesAnteproyecto Equipo 8Alex TorresNo ratings yet
- Flow Past A Circular Cylinder: William J. DevenportDocument16 pagesFlow Past A Circular Cylinder: William J. DevenportShiva UNo ratings yet
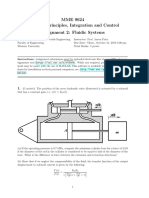
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsDocument2 pagesMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelNo ratings yet
- TP Pompes AnglaisDocument4 pagesTP Pompes AnglaisTannaz HadizadeNo ratings yet
- 2014 Piscaglia - Unsteady Engine Analysis With Movinf Mech in OpenFOAMDocument10 pages2014 Piscaglia - Unsteady Engine Analysis With Movinf Mech in OpenFOAMCristiano BeckNo ratings yet
- Ch4 Steam NozzleDocument10 pagesCh4 Steam Nozzleمحمد احمد گاطعNo ratings yet
- ME 96 Turbomachine Experiment: F (Cycles/s) S MinDocument12 pagesME 96 Turbomachine Experiment: F (Cycles/s) S MinAnonymous EKqkRJsJNNo ratings yet
- Archimedes Screw PrincipleDocument5 pagesArchimedes Screw Principlealvin bautistaNo ratings yet
- Lab Manual Thermodynamics Nozzle EfficiencyDocument6 pagesLab Manual Thermodynamics Nozzle EfficiencyMuhammad Firdaws0% (2)
- The Impulse Design of Transformer Oil-Cellulose Structures: J.K. Nelson C. ShawDocument3 pagesThe Impulse Design of Transformer Oil-Cellulose Structures: J.K. Nelson C. ShawAzad RahmanNo ratings yet
- Conservation LawsDocument33 pagesConservation Lawsafaq ahmad khanNo ratings yet
- Chapter15 Pneumatic Hoist 2Document8 pagesChapter15 Pneumatic Hoist 2YAKUBU A. AROGENo ratings yet
- Bouncing of The Diesel Injector Needle at The Closing StageDocument10 pagesBouncing of The Diesel Injector Needle at The Closing StageShahfin Ahmed IftiNo ratings yet
- Summer Internship: PresentationDocument34 pagesSummer Internship: PresentationPrakharesh AwasthiNo ratings yet
- Conservation of Energy: The Bernoulli Equation: Figure 1. A Very Large Venturi MeterDocument8 pagesConservation of Energy: The Bernoulli Equation: Figure 1. A Very Large Venturi Meterdist2235No ratings yet
- Tutorial English VersionDocument13 pagesTutorial English Versionalejandro restrepoNo ratings yet
- Cosmotec-Stulz Exw ChillerDocument66 pagesCosmotec-Stulz Exw Chilleralejandro restrepoNo ratings yet
- Pitini Italian Mesh MachineDocument223 pagesPitini Italian Mesh Machinealejandro restrepoNo ratings yet
- Dynamic Model of Solenoids Under Impact Excitation, Including Motion and Eddy CurrentsDocument10 pagesDynamic Model of Solenoids Under Impact Excitation, Including Motion and Eddy Currentsalejandro restrepoNo ratings yet
- Analysis Using One-Dimensional Modeling To Analyse The Influence of The Use of BiodieselsDocument10 pagesAnalysis Using One-Dimensional Modeling To Analyse The Influence of The Use of Biodieselsalejandro restrepoNo ratings yet
- 27 Points of Difference Between Personnel Management & HRDDocument2 pages27 Points of Difference Between Personnel Management & HRDMurtaza Ejaz33% (3)
- Cot Observation ToolDocument14 pagesCot Observation ToolArnoldBaladjayNo ratings yet
- WDP Process Diagrams v1Document6 pagesWDP Process Diagrams v1Ryan HengNo ratings yet
- Project BAGETS Wok Plan and Budget SIPDocument4 pagesProject BAGETS Wok Plan and Budget SIPMaia AlvarezNo ratings yet
- Asian Paints Final v1Document20 pagesAsian Paints Final v1Mukul MundleNo ratings yet
- OIl Rig Safety ChecklistDocument10 pagesOIl Rig Safety ChecklistTom TaoNo ratings yet
- Revised PARA Element2 Radio LawsDocument81 pagesRevised PARA Element2 Radio LawsAurora Pelagio Vallejos100% (4)
- Chapter 4 Seepage TheoriesDocument60 pagesChapter 4 Seepage Theoriesmimahmoud100% (1)
- Busbusilak - ResearchPlan 3Document4 pagesBusbusilak - ResearchPlan 3zkcsswddh6No ratings yet
- DR - Rajinikanth - Pharmaceutical ValidationDocument54 pagesDR - Rajinikanth - Pharmaceutical Validationمحمد عطاNo ratings yet
- Mortars in Norway From The Middle Ages To The 20th Century: Con-Servation StrategyDocument8 pagesMortars in Norway From The Middle Ages To The 20th Century: Con-Servation StrategyUriel PerezNo ratings yet
- Day 2 - Evident's Official ComplaintDocument18 pagesDay 2 - Evident's Official ComplaintChronicle Herald100% (1)
- Hospital Furniture: Project Profile-UpdatedDocument7 pagesHospital Furniture: Project Profile-UpdatedGaurav GuptaNo ratings yet
- Birth Trauma and Post Traumatic Stress Disorder The Importance of Risk and ResilienceDocument5 pagesBirth Trauma and Post Traumatic Stress Disorder The Importance of Risk and ResilienceMsRockPhantomNo ratings yet
- Historical Roots of The "Whitening" of BrazilDocument23 pagesHistorical Roots of The "Whitening" of BrazilFernandoMascarenhasNo ratings yet
- General Mathematics SS3 2ND Term SchemeDocument2 pagesGeneral Mathematics SS3 2ND Term Schemesam kaluNo ratings yet
- Beginning Cosmetic ChemistryDocument1 pageBeginning Cosmetic ChemistrySergio Rugerio0% (1)
- 10 - SHM, Springs, DampingDocument4 pages10 - SHM, Springs, DampingBradley NartowtNo ratings yet
- ILI9481 DatasheetDocument143 pagesILI9481 DatasheetdetonatNo ratings yet
- Modicon PLC CPUS Technical Details.Document218 pagesModicon PLC CPUS Technical Details.TrbvmNo ratings yet
- Asugal Albi 4540Document2 pagesAsugal Albi 4540dyetex100% (1)
- Ce Project 1Document7 pagesCe Project 1emmaNo ratings yet
- The Ins and Outs Indirect OrvinuDocument8 pagesThe Ins and Outs Indirect OrvinusatishNo ratings yet
- American J of Comm Psychol - 2023 - Palmer - Looted Artifacts and Museums Perpetuation of Imperialism and RacismDocument9 pagesAmerican J of Comm Psychol - 2023 - Palmer - Looted Artifacts and Museums Perpetuation of Imperialism and RacismeyeohneeduhNo ratings yet
- sp.1.3.3 Atoms,+Elements+&+Molecules+ActivityDocument4 pagessp.1.3.3 Atoms,+Elements+&+Molecules+ActivityBryaniNo ratings yet
- SPWM Vs SVMDocument11 pagesSPWM Vs SVMpmbalajibtechNo ratings yet
- 1207 - RTC-8065 II InglesDocument224 pages1207 - RTC-8065 II InglesGUILHERME SANTOSNo ratings yet
- Woldia University: A Non Ideal TransformerDocument24 pagesWoldia University: A Non Ideal TransformerKANDEGAMA H.R. (BET18077)No ratings yet
- Dashrath Nandan JAVA (Unit2) NotesDocument18 pagesDashrath Nandan JAVA (Unit2) NotesAbhinandan Singh RanaNo ratings yet
- CYPE 2021 + CYPE ArchitectureDocument15 pagesCYPE 2021 + CYPE ArchitectureHajar CypeMarocNo ratings yet
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (54)
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Powder Coating: A How-to Guide for Automotive, Motorcycle, and Bicycle PartsFrom EverandPowder Coating: A How-to Guide for Automotive, Motorcycle, and Bicycle PartsRating: 4.5 out of 5 stars4.5/5 (17)
- How to Fabricate Automotive Fiberglass & Carbon Fiber PartsFrom EverandHow to Fabricate Automotive Fiberglass & Carbon Fiber PartsRating: 5 out of 5 stars5/5 (4)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AFrom EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANo ratings yet
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- Well Integrity for Workovers and RecompletionsFrom EverandWell Integrity for Workovers and RecompletionsRating: 5 out of 5 stars5/5 (3)
- Electric Motors and Drives: Fundamentals, Types and ApplicationsFrom EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsRating: 4.5 out of 5 stars4.5/5 (12)
- Allison Transmissions: How to Rebuild & Modify: How to Rebuild & ModifyFrom EverandAllison Transmissions: How to Rebuild & Modify: How to Rebuild & ModifyRating: 5 out of 5 stars5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Small Engines and Outdoor Power Equipment: A Care & Repair Guide for: Lawn Mowers, Snowblowers & Small Gas-Powered ImplementsFrom EverandSmall Engines and Outdoor Power Equipment: A Care & Repair Guide for: Lawn Mowers, Snowblowers & Small Gas-Powered ImplementsNo ratings yet
- The Little Black Book of Motorcycle WisdomFrom EverandThe Little Black Book of Motorcycle WisdomRating: 4.5 out of 5 stars4.5/5 (6)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceFrom EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNo ratings yet
- Modern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingFrom EverandModern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingRating: 4.5 out of 5 stars4.5/5 (9)
- Troubleshooting and Repair of Diesel EnginesFrom EverandTroubleshooting and Repair of Diesel EnginesRating: 1.5 out of 5 stars1.5/5 (2)
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingFrom EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingNo ratings yet