You might also like
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Bai 2Document47 pagesBai 2Nguyen Tan DuyNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Reference: DSP LAB by Sanjit K. MitraDocument16 pagesReference: DSP LAB by Sanjit K. Mitrayelyah seriousNo ratings yet
- Lab 12 DSPDocument6 pagesLab 12 DSPWaleed TahirNo ratings yet
- LABEX4 Solved DSPDocument16 pagesLABEX4 Solved DSPTushar KanjwaniNo ratings yet
- HW 02 SolDocument50 pagesHW 02 SolSinh TốNo ratings yet
- Kumar Kartikey DSP LexyDocument84 pagesKumar Kartikey DSP LexyKumar KartikeyNo ratings yet
- Reference: Digital Signal Processing Laboratory Using Matlab Author: Sanjit K. MitraDocument14 pagesReference: Digital Signal Processing Laboratory Using Matlab Author: Sanjit K. MitraPatrick HawkinsNo ratings yet
- Lab No 3Document27 pagesLab No 3Ali MohsinNo ratings yet
- DSP Lab01 HandoutDocument9 pagesDSP Lab01 HandoutHina ImtiazNo ratings yet
- DSP Lab Manual Final Presidency UniversityDocument58 pagesDSP Lab Manual Final Presidency UniversitySUNIL KUMAR0% (1)
- Bài 2-TT DSPDocument40 pagesBài 2-TT DSPVo Phong PhuNo ratings yet
- DSP Lab FileDocument26 pagesDSP Lab FileMukul RanaNo ratings yet
- Ei 7211-Circuit Simulation Lab List of ExperimentsDocument61 pagesEi 7211-Circuit Simulation Lab List of ExperimentsKʀɩsʜŋʌ KʌŋʌŋNo ratings yet
- DSP Lab 05Document12 pagesDSP Lab 05Mohsin AliNo ratings yet
- DSP Manual Autumn 2011Document108 pagesDSP Manual Autumn 2011Ata Ur Rahman KhalidNo ratings yet
- Department of Electrical EngineeringDocument8 pagesDepartment of Electrical EngineeringSanjar BeyNo ratings yet
- DSP Lab ReportDocument26 pagesDSP Lab ReportPramod SnkrNo ratings yet
- Digital Signal Processing Lab Manual: Iii B.Tech I SemDocument50 pagesDigital Signal Processing Lab Manual: Iii B.Tech I Sem19501A0459 MAKANA PRASANNA LAKSHMINo ratings yet
- Lab 5 1Document11 pagesLab 5 1hamzaNo ratings yet
- Digital Signal Processing Lab: Practical RecordDocument30 pagesDigital Signal Processing Lab: Practical RecordAnveshGopalamNo ratings yet
- Third Year: Practical Work Book For The Course EE-393 Digital Signal ProcessingDocument44 pagesThird Year: Practical Work Book For The Course EE-393 Digital Signal ProcessingLakshmi KrishnaNo ratings yet
- DSP ReportDocument31 pagesDSP Reportrefat01754433564No ratings yet
- Advanced Digital Signal Processing Spring 2012: Signal Representation and Time Domain AnalysisDocument46 pagesAdvanced Digital Signal Processing Spring 2012: Signal Representation and Time Domain AnalysisImran ShahNo ratings yet
- AB Iscrete Time Systems: 1. Linearity and Non-LinearityDocument8 pagesAB Iscrete Time Systems: 1. Linearity and Non-LinearityŘana Ahtisham AliNo ratings yet
- Digital Signal Processing LabDocument16 pagesDigital Signal Processing LabCharmil GandhiNo ratings yet
- Advanced Digital Signal Processing Spring 2012: Signal Representation and Time Domain AnalysisDocument46 pagesAdvanced Digital Signal Processing Spring 2012: Signal Representation and Time Domain AnalysisShoaib MalikNo ratings yet
- DSP Laboratory Activity 2Document55 pagesDSP Laboratory Activity 2Ayel Cejas Costiniano100% (1)
- DSS Exp5Document11 pagesDSS Exp5Nayan MaheshwariNo ratings yet
- DSP Laboratory Activity 2 NewDocument16 pagesDSP Laboratory Activity 2 NewBradLyBerroyaNo ratings yet
- Lab Module 1 DSPDocument8 pagesLab Module 1 DSPistiaque_hmdNo ratings yet
- Lab 3Document8 pagesLab 3yohanNo ratings yet
- Matlab QuestionsDocument9 pagesMatlab QuestionsNimal_V_Anil_2526100% (2)
- Department of Electronics & Communication Engineering: Amrapali Institute OF Technology and SciencesDocument42 pagesDepartment of Electronics & Communication Engineering: Amrapali Institute OF Technology and SciencesEr Gaurav PandeyNo ratings yet
- MatlabDocument34 pagesMatlabMeghanaNo ratings yet
- Lab7 Lab8Document16 pagesLab7 Lab8sylunNo ratings yet
- Digital Signal Processing Lab Exercise 1: Time-Domain Representation and OperationsDocument4 pagesDigital Signal Processing Lab Exercise 1: Time-Domain Representation and OperationsFadillah RomadhonNo ratings yet
- DFT IDFT PRGDocument11 pagesDFT IDFT PRGMuzammil AhmedNo ratings yet
- DSP Lab ExamDocument7 pagesDSP Lab ExamUzair AhmedNo ratings yet
- DSP Lab#05Document6 pagesDSP Lab#05Aayan ShahNo ratings yet
- DSP Report 2014Document74 pagesDSP Report 2014Megha Shree NaiduNo ratings yet
- DSP Lab Manual 2010Document53 pagesDSP Lab Manual 2010nullka0% (1)
- Digital Signal Processing Lab task outputs and answersDocument18 pagesDigital Signal Processing Lab task outputs and answersMuhammad AnasNo ratings yet
- SignalsDocument19 pagesSignalsAlmuzreen AlihNo ratings yet
- AV 315 Control System: Raman Chawla SC12B042Document37 pagesAV 315 Control System: Raman Chawla SC12B042Raman ChawlaNo ratings yet
- DSP Lab ManualDocument75 pagesDSP Lab ManualRyan951No ratings yet
- MANUAL File: Department: Electronics and Communication Session: JAN-MAY2014Document17 pagesMANUAL File: Department: Electronics and Communication Session: JAN-MAY2014parasianNo ratings yet
- Part-A Experiments Using Matlab: DSP Lab ManualDocument40 pagesPart-A Experiments Using Matlab: DSP Lab ManualSharth KumarNo ratings yet
- Exp 2Document9 pagesExp 2Mohammad HasnainNo ratings yet
- Lab 5 Introduction To ConvulutionDocument12 pagesLab 5 Introduction To ConvulutionUsman jadoonNo ratings yet
- Lab 7: Discrete Time SystemsDocument1 pageLab 7: Discrete Time Systemsមរតកខ្មែរ ចម្រៀងខ្មែរNo ratings yet
- Generation of Basic Signals: AIM: To Write A MATLAB Program To Generate Various Type of Signals. AlgorithmDocument39 pagesGeneration of Basic Signals: AIM: To Write A MATLAB Program To Generate Various Type of Signals. AlgorithmMrjayanthiNo ratings yet
- Final CSDocument28 pagesFinal CSkvbrothers2004No ratings yet
- Moeed Signal Manuals 6-14Document44 pagesMoeed Signal Manuals 6-14Sprout GigsNo ratings yet
- DSP LM15 - 0611Document108 pagesDSP LM15 - 0611Muthu SaravananNo ratings yet
- VTU DSP Lab Using ComposeDocument21 pagesVTU DSP Lab Using Composecuong huynhNo ratings yet
- DIGITAL COMMUNICATION SYSTEM: PULSE CODE MODULATIONDocument5 pagesDIGITAL COMMUNICATION SYSTEM: PULSE CODE MODULATIONAbbaas AlifNo ratings yet
- DSP NewDocument62 pagesDSP NewSunitha JosephineNo ratings yet
- Very Easy Toeic PDFDocument258 pagesVery Easy Toeic PDFtuvan1011100% (1)
- BSQL TestQuickDocument52 pagesBSQL TestQuickKhoai Tây ChiênNo ratings yet
- HCM UIT Requirement Design 07012017Document22 pagesHCM UIT Requirement Design 07012017LongBongCotNo ratings yet
- A1: Find Out How Statment/branch/path Need Cover in Below Code. After Draw Flow ChartDocument4 pagesA1: Find Out How Statment/branch/path Need Cover in Below Code. After Draw Flow ChartLongBongCotNo ratings yet
- Ficha Tecnica BateriasDocument2 pagesFicha Tecnica Bateriasbryan arancibiaNo ratings yet
- Worksheet 13 PDFDocument4 pagesWorksheet 13 PDFVijay Bhaskar50% (2)
- An3095 Stevalisv002v1 Stevalisv002v2 3 KW Gridconnected PV System Based On The Stm32f103xx StmicroelectronicsDocument55 pagesAn3095 Stevalisv002v1 Stevalisv002v2 3 KW Gridconnected PV System Based On The Stm32f103xx StmicroelectronicsAhmar Hayat KhanNo ratings yet
- Compressor Control Valve Identification: Product BulletinDocument4 pagesCompressor Control Valve Identification: Product BulletinIgnasiNo ratings yet
- 3GPP TS 36.101: Technical SpecificationDocument223 pages3GPP TS 36.101: Technical SpecificationsomberriNo ratings yet
- Loadsensing Technical Datasheet September 2019Document8 pagesLoadsensing Technical Datasheet September 2019davzuluetaNo ratings yet
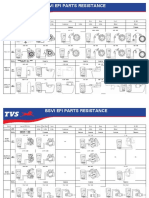
- EFI ResistanceDocument3 pagesEFI ResistanceMuni Muniyappan33% (3)
- EnergoGlobal EG 22 PDocument4 pagesEnergoGlobal EG 22 PnebjakNo ratings yet
- SRP-6MA (-HV) : Key FeaturesDocument2 pagesSRP-6MA (-HV) : Key FeaturesNanangDatadikJatimNo ratings yet
- Single Event Effects Radiation Test ReportDocument15 pagesSingle Event Effects Radiation Test ReportRahul SushruthNo ratings yet
- UPS SPEC TECHNICAL SPECDocument26 pagesUPS SPEC TECHNICAL SPECengrrafNo ratings yet
- 0651 24 System 10 Generic Manual 09 18Document57 pages0651 24 System 10 Generic Manual 09 18Siva Raman MurugesanNo ratings yet
- Models - Acdc.capacitor DCDocument16 pagesModels - Acdc.capacitor DCFrancisco Rafael CerónNo ratings yet
- Nature of Electrical Supply CharacteristicsDocument27 pagesNature of Electrical Supply CharacteristicsDrPrashant M. MenghalNo ratings yet
- OLED Specification SheetDocument27 pagesOLED Specification SheetBianca SandorNo ratings yet
- Transformer Class 12 ProjectDocument21 pagesTransformer Class 12 ProjectAbhishek Sen50% (2)
- Electrical Transformers and Rotating Machines 4th Edition Herman Solutions ManualDocument2 pagesElectrical Transformers and Rotating Machines 4th Edition Herman Solutions Manuala2264888170% (1)
- AN118fb PDFDocument48 pagesAN118fb PDFLOLONo ratings yet
- UTCPanel+ Guide EDocument65 pagesUTCPanel+ Guide Ejroyal692974100% (1)
- Chapter 2 Computer EvolutionDocument28 pagesChapter 2 Computer EvolutionmillerNo ratings yet
- 11 PurchaseOrder FormDocument2 pages11 PurchaseOrder FormJocelyn Nacion OrogoNo ratings yet
- Manual CL-3022WKDocument11 pagesManual CL-3022WKDario ZainNo ratings yet
- Jevi - Junction Boxes For Immersion Heaters - Technical Data SheetDocument2 pagesJevi - Junction Boxes For Immersion Heaters - Technical Data SheetHasibKaabiNo ratings yet
- PWM8 XDocument8 pagesPWM8 XRyan FullerNo ratings yet
- Humidity & Temperature Datalogger: Model RHT20Document5 pagesHumidity & Temperature Datalogger: Model RHT20Calibration Abu DhabiNo ratings yet
- SF-2001-SureFire II High Energy Igniter (English) 2020-12-17Document24 pagesSF-2001-SureFire II High Energy Igniter (English) 2020-12-17akash kurheNo ratings yet
- Benefits of Preventive Maintenance PDFDocument19 pagesBenefits of Preventive Maintenance PDFGlendonNo ratings yet
- ARPAE AeroMINEs 2018 SANDDocument2 pagesARPAE AeroMINEs 2018 SANDJofi001No ratings yet
- Sleek Surface SM250-1 6,12,15,18WDocument8 pagesSleek Surface SM250-1 6,12,15,18WkuffainNo ratings yet
- Microwave Link Design - Nueva EcijaDocument79 pagesMicrowave Link Design - Nueva EcijaMark Vincent Fortaleza55% (11)
- Algorithms to Live By: The Computer Science of Human DecisionsFrom EverandAlgorithms to Live By: The Computer Science of Human DecisionsRating: 4.5 out of 5 stars4.5/5 (722)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityFrom EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityRating: 5 out of 5 stars5/5 (1)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideFrom EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideRating: 5 out of 5 stars5/5 (2)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- 8-Bit Apocalypse: The Untold Story of Atari's Missile CommandFrom Everand8-Bit Apocalypse: The Untold Story of Atari's Missile CommandRating: 3.5 out of 5 stars3.5/5 (10)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseFrom EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseRating: 3.5 out of 5 stars3.5/5 (12)
- So You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenFrom EverandSo You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenRating: 4.5 out of 5 stars4.5/5 (35)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (12)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Everybody Lies: Big Data, New Data, and What the Internet Can Tell Us About Who We Really AreFrom EverandEverybody Lies: Big Data, New Data, and What the Internet Can Tell Us About Who We Really AreRating: 4.5 out of 5 stars4.5/5 (911)
- Dark Data: Why What You Don’t Know MattersFrom EverandDark Data: Why What You Don’t Know MattersRating: 4.5 out of 5 stars4.5/5 (3)
- AI Money Machine: Unlock the Secrets to Making Money Online with AIFrom EverandAI Money Machine: Unlock the Secrets to Making Money Online with AINo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet