You might also like
- Matlab Code For Radial Basis FunctionsDocument13 pagesMatlab Code For Radial Basis FunctionsSubash Chandar Adikesavan100% (2)
- CD Lab FileDocument31 pagesCD Lab Filemahakmahak49793No ratings yet
- Record ContentsDocument82 pagesRecord Contentsalex00600royNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Domaci Pedja: For For If End End EndDocument10 pagesDomaci Pedja: For For If End End EndМарко БулатовићNo ratings yet
- cs-2 Lab CodesDocument9 pagescs-2 Lab CodesBharathNo ratings yet
- Advanced C Concepts and Programming: First EditionFrom EverandAdvanced C Concepts and Programming: First EditionRating: 3 out of 5 stars3/5 (1)
- Vea Pa Que Se Entretenga AprendiendoDocument24 pagesVea Pa Que Se Entretenga AprendiendoJoseph Borja HernandezNo ratings yet
- Assignment 2: AnswerDocument13 pagesAssignment 2: AnswerAkash Ranjan SahooNo ratings yet
- CT 303 Digital Communications Lab 9: Heer Gohil 201901135Document25 pagesCT 303 Digital Communications Lab 9: Heer Gohil 201901135H GNo ratings yet
- Computer Network Lab ManualDocument14 pagesComputer Network Lab Manualtripathiabhisehk57147No ratings yet
- CS2ASSIGNMENTDocument16 pagesCS2ASSIGNMENTalokb210846eeNo ratings yet
- SC LabDocument50 pagesSC Labponuselvi20114No ratings yet
- Matlab CodesDocument92 pagesMatlab Codesonlymag4u75% (8)
- % Plotting The Given Question With CoordinatesDocument10 pages% Plotting The Given Question With CoordinatesNishan GajurelNo ratings yet
- % Plotting The Given Question With CoordinatesDocument10 pages% Plotting The Given Question With CoordinatesNishan GajurelNo ratings yet
- DSP Lab ManualDocument62 pagesDSP Lab Manuall_wondersNo ratings yet
- Experiment 5Document8 pagesExperiment 5shaik fareedNo ratings yet
- RECORD s7 Ktu LabDocument56 pagesRECORD s7 Ktu LabananthuclashNo ratings yet
- Experiment No: 13 Transient and Steady State Response AnalysisDocument28 pagesExperiment No: 13 Transient and Steady State Response Analysisayesha amjadNo ratings yet
- 20BCS5900 - Abhishek - Kumar - CC - Exp - 5Document11 pages20BCS5900 - Abhishek - Kumar - CC - Exp - 5Krishna KumarNo ratings yet
- MatlabDocument25 pagesMatlabMuhammad TayyabNo ratings yet
- Experiment-5: AIM:WAP in MATLAB To Find The Root of Following Equations Using Gauss EliminationDocument26 pagesExperiment-5: AIM:WAP in MATLAB To Find The Root of Following Equations Using Gauss EliminationSanjeev Kumar PandeyNo ratings yet
- Open Ended Exp DSPDocument55 pagesOpen Ended Exp DSPTilak shastriNo ratings yet
- DAA FinalDocument70 pagesDAA FinalAtharva HonraoNo ratings yet
- Listing Code Voice RecognitionDocument11 pagesListing Code Voice RecognitionRivanto ParungNo ratings yet
- DSP ReportDocument31 pagesDSP Reportrefat01754433564No ratings yet
- Lab Manual TocDocument60 pagesLab Manual Tocpv.premkumar2005No ratings yet
- Tutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: CodeDocument13 pagesTutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: Codekiran preethiNo ratings yet
- C Lab QuestionsDocument20 pagesC Lab QuestionsBibinMathew100% (9)
- CD FileDocument31 pagesCD Fileyipop57406No ratings yet
- S DixitDocument57 pagesS DixitRushi GoreNo ratings yet
- Final CSDocument28 pagesFinal CSkvbrothers2004No ratings yet
- Lab Manual Soft ComputingDocument44 pagesLab Manual Soft ComputingAnuragGupta100% (1)
- SahiniDocument26 pagesSahiniRajat GambhirNo ratings yet
- Digital Communication Systems Lab Software: Meghna Rattanpal 17BEC0580Document19 pagesDigital Communication Systems Lab Software: Meghna Rattanpal 17BEC0580natasha SharmaNo ratings yet
- Matlab LectureDocument6 pagesMatlab Lecturekafle_yrsNo ratings yet
- Matematika Biologi Tugas Ke 3Document29 pagesMatematika Biologi Tugas Ke 3Maya MahatmaNo ratings yet
- NnfuzzysampleprogramsDocument9 pagesNnfuzzysampleprogramsSn ProfNo ratings yet
- Csypra3 Assignment 2 2020Document15 pagesCsypra3 Assignment 2 2020Tshepo Moloto100% (1)
- NSM Practical Sem II1Document12 pagesNSM Practical Sem II1Mr.Hacker AnupNo ratings yet
- Lab5 SolutionsDocument4 pagesLab5 Solutionskcyh8gnszvNo ratings yet
- SS Practical (18) .Document21 pagesSS Practical (18) .Mayur ChavanNo ratings yet
- Daa Final JournalDocument16 pagesDaa Final JournalSudha DesaiNo ratings yet
- Galgotias College of Engineering & Technology: (Knowledge Park-II, Greater Noida, Uttar Pradesh, India)Document35 pagesGalgotias College of Engineering & Technology: (Knowledge Park-II, Greater Noida, Uttar Pradesh, India)Lucky kgnNo ratings yet
- Finite ExplicitDocument2 pagesFinite ExplicithlvijaykumarNo ratings yet
- Simulation of Signal Constellations ofDocument19 pagesSimulation of Signal Constellations ofThahsin ThahirNo ratings yet
- Experiment # 13: Transient and Steady State Response AnalysisDocument19 pagesExperiment # 13: Transient and Steady State Response AnalysisHafeez AliNo ratings yet
- Industrial Computing Artificial Neural Network Eng. Byron Lima MSCDocument13 pagesIndustrial Computing Artificial Neural Network Eng. Byron Lima MSCRandy romero100% (1)
- Assignment2 Am56303Document20 pagesAssignment2 Am56303Anuj SaidNo ratings yet
- Digital Communication: LAB FileDocument27 pagesDigital Communication: LAB FileSarthak PalNo ratings yet
- Matlab Code For Implementation of Routh Harwitz TableDocument4 pagesMatlab Code For Implementation of Routh Harwitz Tablewaqasahmadz100% (1)
- DatastructuresfinallDocument53 pagesDatastructuresfinalltbhumuytjNo ratings yet
- DSP ProgramDocument118 pagesDSP ProgramSandeep Banerjee100% (1)
- Matlab ExamDocument25 pagesMatlab ExamAliceAlormenuNo ratings yet
- Mca 502 Internet Technology and Applications Syllabus MCADocument2 pagesMca 502 Internet Technology and Applications Syllabus MCAjisskuruvillaNo ratings yet
- IP Transport NetworkDocument28 pagesIP Transport NetworkRavikumar Vachhani100% (2)
- iM-Connect: Protocol Conversion Software User GuideDocument61 pagesiM-Connect: Protocol Conversion Software User GuideGeovanni CandoNo ratings yet
- Live Debugging of Stateflow Charts While Running On EcuDocument27 pagesLive Debugging of Stateflow Charts While Running On EcuAli Emre YılmazNo ratings yet
- Lab 5Document23 pagesLab 5Lwin KoNo ratings yet
- Bsci OspfDocument68 pagesBsci OspfEhsan YazdaniNo ratings yet
- DAP-2660 A1 Manual v1.04Document91 pagesDAP-2660 A1 Manual v1.04Martín E. Maldonado MaldonadoNo ratings yet
- Deploying SIP Trunks With Cisco Unified Border Element (CUBE) Enterprise and SRST Co-LocationDocument206 pagesDeploying SIP Trunks With Cisco Unified Border Element (CUBE) Enterprise and SRST Co-LocationJuancho BenzNo ratings yet
- HCIA-5G V2.0 Exam OutlineDocument2 pagesHCIA-5G V2.0 Exam OutlineTawfeek YasserNo ratings yet
- At Commands Lte 3GPP TS 27 007Document214 pagesAt Commands Lte 3GPP TS 27 007Ravi SVNo ratings yet
- Wi-Fi Technolgy: Webopedia)Document6 pagesWi-Fi Technolgy: Webopedia)Dasari Jaswanth NaiduNo ratings yet
- Java Ieee 2012 2013 TitlesDocument28 pagesJava Ieee 2012 2013 TitlesvijaybtechNo ratings yet
- St. Merry University School of Graduate Studies Research Methods and CommunicationDocument5 pagesSt. Merry University School of Graduate Studies Research Methods and CommunicationmogessieNo ratings yet
- Essential Router Hardening GuideDocument13 pagesEssential Router Hardening GuideGary Freeman100% (1)
- zNID 2400A Series Indoor GPON ONT: ZNID-GPON-2402A, 2403A, 2424A, 2425A, 2426A & 2427ADocument4 pageszNID 2400A Series Indoor GPON ONT: ZNID-GPON-2402A, 2403A, 2424A, 2425A, 2426A & 2427AAhmed SakrNo ratings yet
- User Manual: Ibox-Mbs-EsserDocument30 pagesUser Manual: Ibox-Mbs-Essertest testNo ratings yet
- VisiLogic CommunicationDocument146 pagesVisiLogic CommunicationEduardo Madrigal JimenezNo ratings yet
- Hamamura PDFDocument2 pagesHamamura PDFnashwan AbdulatefNo ratings yet
- UG TerminalWUI 45vel1.7.2.x T0001084 RevB 07262019Document67 pagesUG TerminalWUI 45vel1.7.2.x T0001084 RevB 07262019aldoNo ratings yet
- 02 IoT Technical Sales Training Industrial Ethernet Management OptionsDocument21 pages02 IoT Technical Sales Training Industrial Ethernet Management Optionschindi.comNo ratings yet
- SRWE Module 8Document37 pagesSRWE Module 8Juan José RomeroNo ratings yet
- MasterNet User S Guide 3BSE003839R301Document61 pagesMasterNet User S Guide 3BSE003839R301lcordal100% (1)
- Vsolution Pon App Example v1.0.1Document60 pagesVsolution Pon App Example v1.0.1Chu Minh ThắngNo ratings yet
- EC6801 WirelessDocument11 pagesEC6801 WirelessSankar SubramaniamNo ratings yet
- Internship Group WRKDocument53 pagesInternship Group WRKTadese AtomssaNo ratings yet
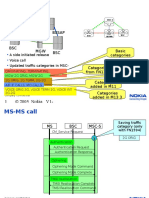
- MS-MS CallDocument8 pagesMS-MS CallMichael PangkeregoNo ratings yet
- Configuring RADIUS Authentication With Client VPN - Cisco MerakiDocument6 pagesConfiguring RADIUS Authentication With Client VPN - Cisco Merakikatherine painiiNo ratings yet
- Lab 11.6.6Document4 pagesLab 11.6.6Dang Hoang Viet (K17 HCM)No ratings yet
- Release Notes For Draytek Vigor 2960 (Uk/Ireland) : Regular - Upgrade Recommended When ConvenientDocument52 pagesRelease Notes For Draytek Vigor 2960 (Uk/Ireland) : Regular - Upgrade Recommended When ConvenientCuong PhungNo ratings yet
- LoRaWAN at A GlanceDocument5 pagesLoRaWAN at A GlancenieyaazbNo ratings yet
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Network+ Study Guide & Practice ExamsFrom EverandNetwork+ Study Guide & Practice ExamsRating: 4.5 out of 5 stars4.5/5 (5)
- ITIL 4 : Drive Stakeholder Value: Reference and study guideFrom EverandITIL 4 : Drive Stakeholder Value: Reference and study guideNo ratings yet
- CWNA Certified Wireless Network Administrator Study Guide: Exam CWNA-108From EverandCWNA Certified Wireless Network Administrator Study Guide: Exam CWNA-108No ratings yet
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityFrom EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityRating: 5 out of 5 stars5/5 (2)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- Palo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsFrom EverandPalo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsNo ratings yet
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringFrom EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringRating: 5 out of 5 stars5/5 (40)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366From EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366No ratings yet
- Rick Gallahers MPLS Training Guide: Building Multi Protocol Label Switching NetworksFrom EverandRick Gallahers MPLS Training Guide: Building Multi Protocol Label Switching NetworksRating: 3.5 out of 5 stars3.5/5 (3)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C01 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C01 ExamRating: 4 out of 5 stars4/5 (1)