You might also like
- BitácoraDocument7 pagesBitácoraMarco NavarreteNo ratings yet
- Aplicaciones de La Manufactura Aditiva de MetalesDocument12 pagesAplicaciones de La Manufactura Aditiva de MetalesMarco NavarreteNo ratings yet
- BITÁCORADocument7 pagesBITÁCORAMarco NavarreteNo ratings yet
- Acta de EntregaDocument1 pageActa de EntregaMarco NavarreteNo ratings yet
- Perfil de ProyectoDocument15 pagesPerfil de ProyectoMarco NavarreteNo ratings yet
- SSDocument16 pagesSSMarco NavarreteNo ratings yet
- TG1Document5 pagesTG1Marco NavarreteNo ratings yet
- Ubicaciónde Participantes Al Al Congreso de Ensayos No Destructivos. PDFDocument20 pagesUbicaciónde Participantes Al Al Congreso de Ensayos No Destructivos. PDFMarco NavarreteNo ratings yet
- Ejercicio 9.3 MARCO NAVARRETEDocument17 pagesEjercicio 9.3 MARCO NAVARRETEMarco NavarreteNo ratings yet
- Introducción A ANSYS y Finito Modelado de Elementos: Página 1Document8 pagesIntroducción A ANSYS y Finito Modelado de Elementos: Página 1Marco NavarreteNo ratings yet
- Calculo de La Formula de BETZDocument6 pagesCalculo de La Formula de BETZMarco NavarreteNo ratings yet
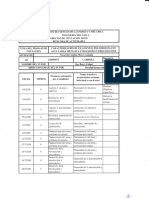
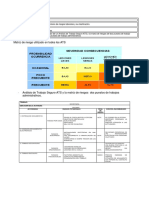
- Matriz de Riesgo Utilizado en Todos Los ATS: Identificar Los Factores de Riesgos Laborales y Su ClasificaciónDocument4 pagesMatriz de Riesgo Utilizado en Todos Los ATS: Identificar Los Factores de Riesgos Laborales y Su ClasificaciónMarco NavarreteNo ratings yet
- LEVANTAMIENTO TOPOGRAFICO EN LINEA DE TRANSMISION (Rev 08ago)Document4 pagesLEVANTAMIENTO TOPOGRAFICO EN LINEA DE TRANSMISION (Rev 08ago)La creatividad de Adriana c.cNo ratings yet
- Mediciones y Rangos de Tolerancia Máximos de Armónicos en Una RedDocument3 pagesMediciones y Rangos de Tolerancia Máximos de Armónicos en Una RedMauricio LlanoNo ratings yet
- Relaciones Gravimetricas y VolumetricasDocument25 pagesRelaciones Gravimetricas y VolumetricasDiacelisNo ratings yet
- 005 Tornello PDFDocument52 pages005 Tornello PDFNicolás Tobar MéndezNo ratings yet
- Clasificacion de Las Ecuaciones DiferencialesDocument2 pagesClasificacion de Las Ecuaciones DiferencialesEduardo GonzalezNo ratings yet
- CI51K Coagulaci N PDFDocument10 pagesCI51K Coagulaci N PDFLucia Medina PimentelNo ratings yet
- Laboratorio Potencial ElectrostaticoDocument4 pagesLaboratorio Potencial ElectrostaticomelissaNo ratings yet
- Amplificadores Diferenciales Con BJTDocument7 pagesAmplificadores Diferenciales Con BJTQuique CastroNo ratings yet
- Tarea1-Aplicacion de Matrices y Determinantes.Document16 pagesTarea1-Aplicacion de Matrices y Determinantes.Paola SotoNo ratings yet
- Aldehidos y CetonasDocument28 pagesAldehidos y CetonascelestinoNo ratings yet
- Materia y División de La MateríaDocument7 pagesMateria y División de La MateríajjreolNo ratings yet
- PinholeDocument5 pagesPinholeLeidy MartinezNo ratings yet
- Mathcad - TareaContinuidadfinalDocument6 pagesMathcad - TareaContinuidadfinalFrancisco GoFlesNo ratings yet
- Reporte 7. Destilación de Alcohol EtílicoDocument3 pagesReporte 7. Destilación de Alcohol EtílicoChiikiiLuNo ratings yet
- Enlaces AtómicosDocument21 pagesEnlaces AtómicosJuan Salvador Jorquera MoralesNo ratings yet
- Cap.3 Fundamentos de RobóticaDocument12 pagesCap.3 Fundamentos de RobóticaJaime Monroy HerreraNo ratings yet
- Amarres y EncintadosDocument8 pagesAmarres y EncintadosSonny Swokowsky BraunNo ratings yet
- Tipos de VigasDocument7 pagesTipos de VigasDayanara MondragonNo ratings yet
- Lab Fisico-Quimica-Determinacion Del Calor Especifico de Un MetalDocument8 pagesLab Fisico-Quimica-Determinacion Del Calor Especifico de Un MetalSteevenRafaelPinargoteNo ratings yet
- Muro de SotanoDocument6 pagesMuro de SotanowalterNo ratings yet
- Examen ElectromagnetismoDocument8 pagesExamen ElectromagnetismoJhon FlorNo ratings yet
- Experimento 1Document8 pagesExperimento 1Laura CabreraNo ratings yet
- Practica ElectroscopioDocument10 pagesPractica ElectroscopioruuuulNo ratings yet
- Compressor X As 186 DD SpanishDocument29 pagesCompressor X As 186 DD SpanishRicky VilNo ratings yet
- Ejercicios PotenciaDocument4 pagesEjercicios PotenciaEfrain Garcia DiazNo ratings yet
- Cespri - Manual Basico Sap 2000 - Sesion 04Document93 pagesCespri - Manual Basico Sap 2000 - Sesion 04KristyeLyNo ratings yet
- P38Document5 pagesP38Anonymous 47w2paW100% (1)
- Modelacion de Huaycos 2013JUL23 I IngCastilloDocument76 pagesModelacion de Huaycos 2013JUL23 I IngCastilloCristian Jallo CruzNo ratings yet
- NTC3252Document7 pagesNTC3252Oscar Andres Anacona GiraldoNo ratings yet
- Compendio de Ejercicios 2016 - Parte 2Document6 pagesCompendio de Ejercicios 2016 - Parte 2GLEENNo ratings yet