You might also like
- Charts For Cofficents of Moments For Continous BeamsDocument19 pagesCharts For Cofficents of Moments For Continous Beamsfat470No ratings yet
- Intelligent Vehicular Networks and Communications: Fundamentals, Architectures and SolutionsFrom EverandIntelligent Vehicular Networks and Communications: Fundamentals, Architectures and SolutionsRating: 1 out of 5 stars1/5 (1)
- 256 QAM Uplink LowMid BandDocument21 pages256 QAM Uplink LowMid Bandmd1234_1984No ratings yet
- Vehicle To Vehicle V2V Communication Scope Importa PDFDocument13 pagesVehicle To Vehicle V2V Communication Scope Importa PDFvahidinkormanNo ratings yet
- Networking in Vehicular Ad-Hoc Networks (VANET) For Accident PreventionDocument9 pagesNetworking in Vehicular Ad-Hoc Networks (VANET) For Accident PreventionIJRASETPublicationsNo ratings yet
- SOLVING TRAFFIC CONGESTION WITH VANETDocument4 pagesSOLVING TRAFFIC CONGESTION WITH VANETvanpointNo ratings yet
- 79 1520674884 - 10-03-2018 PDFDocument9 pages79 1520674884 - 10-03-2018 PDFRahul SharmaNo ratings yet
- Novel Routing Protocol For Vehicular AdhocDocument5 pagesNovel Routing Protocol For Vehicular AdhocconwamcNo ratings yet
- Raza - IDJ2022 - U-Assisted VANETDocument17 pagesRaza - IDJ2022 - U-Assisted VANETMohammad ArifNo ratings yet
- Traffic Differentiated Clustering Routing in DSRC and C-V2X Hybrid Vehicular NetworksDocument13 pagesTraffic Differentiated Clustering Routing in DSRC and C-V2X Hybrid Vehicular NetworksLớn Bài tậpNo ratings yet
- Improved Greedy Routing Protocol For VANETDocument71 pagesImproved Greedy Routing Protocol For VANETelmamoun1No ratings yet
- 38 Ijcse 07322 10Document15 pages38 Ijcse 07322 10Hiba AyoubNo ratings yet
- To Enhance Security & Efficiency of VANET Routing Protocol Using VWCADocument5 pagesTo Enhance Security & Efficiency of VANET Routing Protocol Using VWCAInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Exploring Software Defined Networks For Seamless HandoversDocument11 pagesExploring Software Defined Networks For Seamless Handoversjainam lathiyaNo ratings yet
- Channel Characterization For Vehicle-to-Infrastructure Communications in Millimeter-Wave BandDocument17 pagesChannel Characterization For Vehicle-to-Infrastructure Communications in Millimeter-Wave BandAbdo ElmessiouiNo ratings yet
- Transportation Security Through Inter Vehicular Ad-Hoc Networks (Vanets) Handovers Using RF Trans ReceiverDocument6 pagesTransportation Security Through Inter Vehicular Ad-Hoc Networks (Vanets) Handovers Using RF Trans ReceivermfhfhfNo ratings yet
- Vehicles Awake Routing Protocol With Analysis Determine Knowledge Perception For VANETDocument6 pagesVehicles Awake Routing Protocol With Analysis Determine Knowledge Perception For VANETEditor IJTSRDNo ratings yet
- Particle Swarm Optimization Based Routing Method For Vehicular Ad-Hoc NetworkDocument7 pagesParticle Swarm Optimization Based Routing Method For Vehicular Ad-Hoc Networkoumaima Al bakaliNo ratings yet
- IJFTET - Vol. 4-Issue 1 - A Survey of Routing Protocol in Vanet With Its Pros and ConsDocument6 pagesIJFTET - Vol. 4-Issue 1 - A Survey of Routing Protocol in Vanet With Its Pros and ConsIJFTETNo ratings yet
- Ajeee April 18Document8 pagesAjeee April 18POOJA SAPRANo ratings yet
- CN PDFDocument12 pagesCN PDFanon_863369228No ratings yet
- "A Glance Over The Working Methodology of Vanet": IjarcceDocument5 pages"A Glance Over The Working Methodology of Vanet": IjarcceSahil HambireNo ratings yet
- W Farooq Survey PaperDocument13 pagesW Farooq Survey PaperEhsan Elahi BashirNo ratings yet
- A Comparative Study of Various Routing Protocols in VanetDocument6 pagesA Comparative Study of Various Routing Protocols in Vanetشهاب الدينNo ratings yet
- VehicularAd HocNetworksVANETs AnOverviewandChallengesDocument11 pagesVehicularAd HocNetworksVANETs AnOverviewandChallengesGolugula Madhu SatishNo ratings yet
- A Survey On Vanets Security Attacks and Sybil Attack DetectionDocument18 pagesA Survey On Vanets Security Attacks and Sybil Attack DetectionAdnan AliNo ratings yet
- Chapter 1Document98 pagesChapter 1elmamoun1No ratings yet
- Performance of VANET Through Realistic Large Scale Fading ChannelsDocument6 pagesPerformance of VANET Through Realistic Large Scale Fading ChannelsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Paper Redes TelematicasDocument5 pagesPaper Redes TelematicasRas SoldierNo ratings yet
- A Surveying On Road Safety Using Vehicular Communication NetworksDocument6 pagesA Surveying On Road Safety Using Vehicular Communication NetworksJournal of Computer ApplicationsNo ratings yet
- Design of Intelligent Traffic Light System Using Visible Light CommunicationDocument6 pagesDesign of Intelligent Traffic Light System Using Visible Light CommunicationRishan KundetyNo ratings yet
- (Paperhub - Ir) 10.1109 Tits.2018.2865173Document13 pages(Paperhub - Ir) 10.1109 Tits.2018.2865173mohammad kazemiNo ratings yet
- Vehicle-To-Vehicle Forwarding in GreenDocument16 pagesVehicle-To-Vehicle Forwarding in GreentechmindzNo ratings yet
- Vehicle To Vehicle CommunicationsDocument4 pagesVehicle To Vehicle CommunicationsRudraksh HaranNo ratings yet
- Latency-Aware Load Distribution Model For Vehicular Adhoc Networks (VANETS)Document6 pagesLatency-Aware Load Distribution Model For Vehicular Adhoc Networks (VANETS)International Journal of Innovative Science and Research TechnologyNo ratings yet
- A Comparative Study of MANET and VANET EnvironmentDocument6 pagesA Comparative Study of MANET and VANET EnvironmentJournal of Computing50% (2)
- A Hybrid Model To Extend VehicularDocument6 pagesA Hybrid Model To Extend VehicularNicolas Mora RestrepoNo ratings yet
- A Review Paper On Different Routing Protocols of Vanets: ShiwaniDocument12 pagesA Review Paper On Different Routing Protocols of Vanets: ShiwaniJonh NguyễnNo ratings yet
- A Review On Security Attacks in Vehicular Ad Hoc NetworkDocument6 pagesA Review On Security Attacks in Vehicular Ad Hoc NetworkAnonymous lPvvgiQjRNo ratings yet
- A Novel Approach To Efficient and Reliable RoutingDocument4 pagesA Novel Approach To Efficient and Reliable RoutingconwamcNo ratings yet
- Performance Study of Routing Protocols in Vehicular Adhoc Networks For Efficient Resource ManagementDocument34 pagesPerformance Study of Routing Protocols in Vehicular Adhoc Networks For Efficient Resource ManagementRavi TejaNo ratings yet
- Ahmad, 2021Document15 pagesAhmad, 2021Faisal AliNo ratings yet
- Information Dissemination Delay in Vehicle-to-Vehicle Communication Networks in A Traffic StreamDocument15 pagesInformation Dissemination Delay in Vehicle-to-Vehicle Communication Networks in A Traffic StreamEfrem LousadaNo ratings yet
- V2V communication survey wireless technologiesDocument5 pagesV2V communication survey wireless technologiesfff fffNo ratings yet
- Sensors 22 08941Document18 pagesSensors 22 08941wayne.nguyenNo ratings yet
- Rajesh: December 2018Document11 pagesRajesh: December 2018Kumar AnkitNo ratings yet
- Handoff Schemes For Vehicular Ad-Hoc Networks:: A SurveyDocument6 pagesHandoff Schemes For Vehicular Ad-Hoc Networks:: A SurveyAli KashiNo ratings yet
- Vehicular Ad-Hoc Networks (VANET)Document8 pagesVehicular Ad-Hoc Networks (VANET)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Research Article: Integration of Data From Vehicular Ad Hoc Networks Using Model-Driven Collaborative ToolsDocument16 pagesResearch Article: Integration of Data From Vehicular Ad Hoc Networks Using Model-Driven Collaborative ToolsChouaib SaciNo ratings yet
- Providing Ubiquitous Communication Using: Road-Side Units in VANET Systems: Unveiling The ChallengesDocument6 pagesProviding Ubiquitous Communication Using: Road-Side Units in VANET Systems: Unveiling The ChallengesmfhfhfNo ratings yet
- 1.1 Problem Statement: It Is Sometimes NotDocument4 pages1.1 Problem Statement: It Is Sometimes Notpiyushji125No ratings yet
- VANETDocument13 pagesVANETAbhirup GhoshNo ratings yet
- Realistic Simulation of Vehicular Network in Urban and Semi-Urban Area of IndiaDocument10 pagesRealistic Simulation of Vehicular Network in Urban and Semi-Urban Area of IndiaIJRASETPublicationsNo ratings yet
- V2X Communication Protocol in VANET For Co-Operative Intelligent Transportation SystemDocument6 pagesV2X Communication Protocol in VANET For Co-Operative Intelligent Transportation SystemmraabsNo ratings yet
- Vehicular Ad-Hoc Networks (Vanets) - An Overview and ChallengesDocument11 pagesVehicular Ad-Hoc Networks (Vanets) - An Overview and ChallengesAlex RâpanuNo ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument8 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- A Survey of Vehicular Ad Hoc Network Routing Protocols: Journal of Electrical and Electronic EngineeringDocument5 pagesA Survey of Vehicular Ad Hoc Network Routing Protocols: Journal of Electrical and Electronic EngineeringTaufik Bagus AfandiNo ratings yet
- Onevfc-A Vehicular Fog Computation Platform For Artificial Intelligence in Internet of VehiclesDocument15 pagesOnevfc-A Vehicular Fog Computation Platform For Artificial Intelligence in Internet of VehiclesNguyễn DuyNo ratings yet
- SDN and Fog-based VANET Architecture for Improved ServicesDocument6 pagesSDN and Fog-based VANET Architecture for Improved ServicesSamNo ratings yet
- Secure Computation Offloading in Vehicle Networks Based On Block ChainsDocument6 pagesSecure Computation Offloading in Vehicle Networks Based On Block ChainsIJRASETPublicationsNo ratings yet
- Traffic Management in VANET Using Clustering: Shraddha Gajare, Priyanka Deore, Sumit WaghDocument6 pagesTraffic Management in VANET Using Clustering: Shraddha Gajare, Priyanka Deore, Sumit WagherpublicationNo ratings yet
- Survey PaperDocument4 pagesSurvey PaperKarthik NagNo ratings yet
- IJETR033060Document6 pagesIJETR033060erpublicationNo ratings yet
- IJETR033040Document3 pagesIJETR033040erpublicationNo ratings yet
- IJETR033043Document6 pagesIJETR033043erpublicationNo ratings yet
- IJETR033013Document8 pagesIJETR033013erpublicationNo ratings yet
- IJETR033082Document4 pagesIJETR033082erpublicationNo ratings yet
- IJETR033053Document4 pagesIJETR033053erpublicationNo ratings yet
- IJETR033077Document6 pagesIJETR033077erpublicationNo ratings yet
- IJETR033079Document4 pagesIJETR033079erpublicationNo ratings yet
- IJETR033062Document2 pagesIJETR033062erpublicationNo ratings yet
- IJETR033069Document6 pagesIJETR033069erpublicationNo ratings yet
- IJETR033055Document9 pagesIJETR033055erpublicationNo ratings yet
- IJETR033063Document3 pagesIJETR033063erpublicationNo ratings yet
- IJETR033049Document5 pagesIJETR033049erpublicationNo ratings yet
- IJETR032923Document5 pagesIJETR032923erpublicationNo ratings yet
- IJETR033050Document6 pagesIJETR033050erpublicationNo ratings yet
- IJETR033051Document2 pagesIJETR033051erpublicationNo ratings yet
- Matlab and Simulink Based Simulation of Wideband Code Division Multiple Access (WCDMA)Document6 pagesMatlab and Simulink Based Simulation of Wideband Code Division Multiple Access (WCDMA)erpublicationNo ratings yet
- IJETR033033Document4 pagesIJETR033033erpublicationNo ratings yet
- IJETR033035Document5 pagesIJETR033035erpublicationNo ratings yet
- IJETR033047Document4 pagesIJETR033047erpublicationNo ratings yet
- IJETR033011Document3 pagesIJETR033011erpublicationNo ratings yet
- The Effect of Focus On Spectral Emphasis For Disyllabic Words in ChineseDocument4 pagesThe Effect of Focus On Spectral Emphasis For Disyllabic Words in ChineseerpublicationNo ratings yet
- Thermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuDocument3 pagesThermal Analysis of Motor Controller For Electric Vehicle: Jian-Ping Wen, Chao XuerpublicationNo ratings yet
- IJETR033012Document7 pagesIJETR033012erpublicationNo ratings yet
- IJETR032922Document6 pagesIJETR032922erpublicationNo ratings yet
- Recognition of Heterogeneous Faces Using Kernel Principal Component AnalysisDocument4 pagesRecognition of Heterogeneous Faces Using Kernel Principal Component AnalysiserpublicationNo ratings yet
- IJETR032909Document11 pagesIJETR032909erpublicationNo ratings yet
- ADRC Speed Control of IPMSM With Current Regulator: Wen Jianping, Zhang XuhuiDocument3 pagesADRC Speed Control of IPMSM With Current Regulator: Wen Jianping, Zhang XuhuierpublicationNo ratings yet
- IJETR032918Document12 pagesIJETR032918erpublicationNo ratings yet
- IoT PracticalDocument32 pagesIoT Practical074 Rajpurohit VijeshNo ratings yet
- Cisco UCS Cards To Study For DCUCI Exam-1Document17 pagesCisco UCS Cards To Study For DCUCI Exam-1Srinivas KumarNo ratings yet
- Fortigate System Admin 40 Mr3Document311 pagesFortigate System Admin 40 Mr3dmares03No ratings yet
- STP-or-Ether-Channel in (ROMAN URDU)Document14 pagesSTP-or-Ether-Channel in (ROMAN URDU)Fayyaz AhmedNo ratings yet
- Ourlog 5946Document2 pagesOurlog 5946Yahir Edison Gutierrez PalominoNo ratings yet
- DG Mobility Controllers Deployment Models 5.0 VRDDocument126 pagesDG Mobility Controllers Deployment Models 5.0 VRDsujeet_hatNo ratings yet
- Craft Terminal ManualDocument120 pagesCraft Terminal ManualpravincoldNo ratings yet
- Gbe2C Ethernet Blade Switch For HP C-Class: Quick Setup InstructionsDocument3 pagesGbe2C Ethernet Blade Switch For HP C-Class: Quick Setup Instructionsishmaelmensah70No ratings yet
- Measurement of InfomationDocument17 pagesMeasurement of InfomationYashasvi MittalNo ratings yet
- Dsasw0053242 1783-Etapf1Document230 pagesDsasw0053242 1783-Etapf1tiagobzrraNo ratings yet
- History of Communication Networks and the Invention of the InternetDocument21 pagesHistory of Communication Networks and the Invention of the Internetprodigy1987No ratings yet
- Volume II - Ericsson Field Guide For UTRAN P1-Lite: Feature Parameters and Best PracticesDocument71 pagesVolume II - Ericsson Field Guide For UTRAN P1-Lite: Feature Parameters and Best Practicessara y santi becerra barreto100% (2)
- Industrial Communication Protocols: Sensing and Productivity SolutionsDocument6 pagesIndustrial Communication Protocols: Sensing and Productivity Solutionsaelle00No ratings yet
- DectDocument18 pagesDectmkiran02No ratings yet
- Guide To LTE Security: NIST Special Publication 800-187Document49 pagesGuide To LTE Security: NIST Special Publication 800-187Atanu MondalNo ratings yet
- IBwave Design Release Notes 8.1.2Document24 pagesIBwave Design Release Notes 8.1.2Sho ShoNo ratings yet
- Ensc 427 Project Final Report Group 11Document29 pagesEnsc 427 Project Final Report Group 11Nguy HiểmNo ratings yet
- Manual Router SMCWBR14T-GDocument46 pagesManual Router SMCWBR14T-GJose MachadoNo ratings yet
- CW 5g Training v3 Slides PDFDocument155 pagesCW 5g Training v3 Slides PDFHemaNo ratings yet
- Brocade SwitchDocument3 pagesBrocade SwitchpranayNo ratings yet
- Introduction To Networking: Charles SeveranceDocument6 pagesIntroduction To Networking: Charles SeveranceJyoti BhanotNo ratings yet
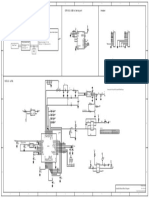
- Power Management System CP2102: USB To Serial Port HeaderDocument1 pagePower Management System CP2102: USB To Serial Port HeaderJuan Sebastian Mejia RinconNo ratings yet
- Tor Write Up FinalDocument23 pagesTor Write Up FinalLiquidDragonNo ratings yet
- HP 1910 24g Poe 170w Je008a Manual de UsuarioDocument9 pagesHP 1910 24g Poe 170w Je008a Manual de UsuarioMagodma TqmNo ratings yet
- ISE Setup and ConfigurationDocument25 pagesISE Setup and ConfigurationbluegyiNo ratings yet
- Solution: Wireshark Lab: NATDocument3 pagesSolution: Wireshark Lab: NATRamanjeet Singh AidhanNo ratings yet
- Configure AAA with Active DirectoryDocument10 pagesConfigure AAA with Active DirectoryLuiz CarlosNo ratings yet
- EKI-5626CI - 5629CI - DS - AdvantechDocument2 pagesEKI-5626CI - 5629CI - DS - AdvantechMaycon MaranNo ratings yet
- Alcatel 4400 BRIDocument7 pagesAlcatel 4400 BRImatt1606No ratings yet