You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Bruce Swedien TipsDocument9 pagesBruce Swedien Tipsrjpfunk100% (1)
- Classical Orchestra, A-B StereoDocument5 pagesClassical Orchestra, A-B StereoZoran TevdovskiNo ratings yet
- AcoustoOptics, Adrian KorpelDocument349 pagesAcoustoOptics, Adrian KorpelDiana Félix100% (2)
- Guideline for Hearing Aid Fitting in Children and AdultsDocument80 pagesGuideline for Hearing Aid Fitting in Children and AdultsPhillip Martinez50% (2)
- Cisco Systems DWDM Primer Oct03Document87 pagesCisco Systems DWDM Primer Oct03anon-983826100% (5)
- (Arkin - 91) - An Efficiently Computable Metric For Comparing Polygonal ShapesDocument8 pages(Arkin - 91) - An Efficiently Computable Metric For Comparing Polygonal Shapesamir_shafiq123No ratings yet
- TH 3 A 5Document8 pagesTH 3 A 5amir_shafiq123No ratings yet
- Spahic at AI 2010Document12 pagesSpahic at AI 2010amir_shafiq123No ratings yet
- Ransac PlaneDocument13 pagesRansac Planeamir_shafiq123No ratings yet
- ECE Faculty HandbookDocument48 pagesECE Faculty Handbookamir_shafiq123No ratings yet
- Seismic instrumentation components and data acquisitionDocument37 pagesSeismic instrumentation components and data acquisitionNamwangala Rashid NatinduNo ratings yet
- Listric Normal Faults PDFDocument15 pagesListric Normal Faults PDFamir_shafiq123No ratings yet
- Basic Principles of The Seismic MethodDocument11 pagesBasic Principles of The Seismic MethodAshraf RafiuddinNo ratings yet
- Chapter 1. Fourier AnalysisDocument17 pagesChapter 1. Fourier Analysisamir_shafiq123No ratings yet
- Chapter 6Document9 pagesChapter 6amir_shafiq123No ratings yet
- p1 SwietojanskiDocument5 pagesp1 Swietojanskiamir_shafiq123No ratings yet
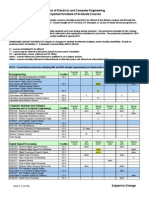
- Course Schedule PGrad Fall 2014Document4 pagesCourse Schedule PGrad Fall 2014amir_shafiq123No ratings yet
- DSP Kit Signal ProcessingDocument18 pagesDSP Kit Signal Processingamir_shafiq123No ratings yet
- SYLLABUSDocument1 pageSYLLABUSamir_shafiq123No ratings yet
- Qasas Ul Ambiya by Ibn E Kaseer PDFDocument725 pagesQasas Ul Ambiya by Ibn E Kaseer PDFM Sajid MahmoodNo ratings yet
- Etd6531 PFozoonmayehDocument98 pagesEtd6531 PFozoonmayehamir_shafiq123No ratings yet
- MAGLEVDocument25 pagesMAGLEVamir_shafiq123No ratings yet
- 2016 Dse Phy 1Document31 pages2016 Dse Phy 1RAKIB AL MAHDINo ratings yet
- Particle in a Box and STM ApplicationsDocument3 pagesParticle in a Box and STM ApplicationsAngel Itachi MinjarezNo ratings yet
- Tuning Your System: Tools For Sound Vol IDocument2 pagesTuning Your System: Tools For Sound Vol Imatheme2000No ratings yet
- Accurate Models For Microstrip Computer-Aided DesignDocument3 pagesAccurate Models For Microstrip Computer-Aided DesignDenz ChoeNo ratings yet
- Oscillatory MotionDocument182 pagesOscillatory MotionAlain McVaneyNo ratings yet
- Berlin Photonics and Optics Companies - 3Document2 pagesBerlin Photonics and Optics Companies - 3Suman RachaNo ratings yet
- End SemDocument29 pagesEnd SemVaskar Ray KarmakarNo ratings yet
- Bill Nye The Science Guy Light & Color: As You View The Video, Answer The Following QuestionsDocument3 pagesBill Nye The Science Guy Light & Color: As You View The Video, Answer The Following QuestionsJeremy TroyerNo ratings yet
- DA2042 ColorDocument29 pagesDA2042 ColorVanathi PriyadharshiniNo ratings yet
- Class Link BudgetDocument11 pagesClass Link BudgetNevin ThomasNo ratings yet
- The Properties of Electromagnetic WavesDocument22 pagesThe Properties of Electromagnetic WavesJane ReyesNo ratings yet
- Measure LASER Wavelength with Diffraction GratingDocument1 pageMeasure LASER Wavelength with Diffraction GratingWaleed MuradNo ratings yet
- Physics PracticalsDocument108 pagesPhysics PracticalsASHISH KHUTENo ratings yet
- MaxiFLASH XLINK User ManualDocument6 pagesMaxiFLASH XLINK User ManualGeoDude51No ratings yet
- ANTENNA Wave Propagation SyllabusDocument46 pagesANTENNA Wave Propagation SyllabusDhiman DasguptaNo ratings yet
- Science BandiolaDocument1 pageScience BandiolaZakari ZackiNo ratings yet
- ECE357 IntroductionDocument27 pagesECE357 IntroductionkinglbfNo ratings yet
- Ocean Waves: Faisal Akbar 15515010 Alif Akbar Putra Bharata 15515027 Bagus Danang 15515040 Eril Arioristanto 15515064Document17 pagesOcean Waves: Faisal Akbar 15515010 Alif Akbar Putra Bharata 15515027 Bagus Danang 15515040 Eril Arioristanto 15515064Junet BoyNo ratings yet
- Broadband Sub-Wavelength Profile High-Gain Antennas Based On Multi-Layer MetasurfacesDocument5 pagesBroadband Sub-Wavelength Profile High-Gain Antennas Based On Multi-Layer MetasurfacesBindhuNo ratings yet
- Method For Laser Source Definition in ZEMAX To Enable Realistic Modelling With RaytracingDocument7 pagesMethod For Laser Source Definition in ZEMAX To Enable Realistic Modelling With RaytracingDu RoyNo ratings yet
- 2 2 Properties of SoundDocument13 pages2 2 Properties of SoundSifatSharminNo ratings yet
- 2003SP MicrowaveOpticsDocument34 pages2003SP MicrowaveOpticsOmar HraouiNo ratings yet
- RF and MWDocument166 pagesRF and MWSOWMIYA S SIT 2020No ratings yet
- Service Bulletin Trucks: Audio SystemDocument47 pagesService Bulletin Trucks: Audio SystemRegistr RegistrNo ratings yet
- Session:: Class: IST YEARDocument9 pagesSession:: Class: IST YEARAppuGappu10% (1)