You might also like
- AS 1735.18 ContentsDocument9 pagesAS 1735.18 ContentsVivaCharles0% (1)
- Codigo de Fallas CATERPILLAR c15Document6 pagesCodigo de Fallas CATERPILLAR c15Junior Lester78% (23)
- Cat 318Document2 pagesCat 318Roman100% (4)
- E200b HidraulicDocument2 pagesE200b HidraulicPaul Barraza67% (3)
- CB-214C and CB-224C Hydraulic System Vibratory Compactors: CB-214C: 9XK1-UP CB-224C: 3AL1-UPDocument2 pagesCB-214C and CB-224C Hydraulic System Vibratory Compactors: CB-214C: 9XK1-UP CB-224C: 3AL1-UPINVESTIGACION Y DESARROLLO100% (1)
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document9 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Lhsan Rajawi100% (1)
- MAN B&W S70ME-C8.2-TII: Project Guide Electronically Controlled Twostroke EnginesDocument387 pagesMAN B&W S70ME-C8.2-TII: Project Guide Electronically Controlled Twostroke EnginesСлавик Мосин100% (1)
- Hino 700 Exhaust Brake-Engine Retarder WireingDocument2 pagesHino 700 Exhaust Brake-Engine Retarder Wireingg.shien5150100% (1)
- MID 130 PID 161 Input Shaft, Rotation SpeedDocument1 pageMID 130 PID 161 Input Shaft, Rotation SpeedhadiNo ratings yet
- MD6540C Air System Modo DrillDocument2 pagesMD6540C Air System Modo DrillElvis100% (1)
- Sistema de Lubricación (Grasa) 7495Document2 pagesSistema de Lubricación (Grasa) 7495Saūl FlōrēsNo ratings yet
- Uenr72710001 145 UpDocument2 pagesUenr72710001 145 UpPatricio AlvaradoNo ratings yet
- Air System 773E Off-Highway Truck: Fluid Power SymbolsDocument4 pagesAir System 773E Off-Highway Truck: Fluid Power SymbolsfalahNo ratings yet
- Renr5846 00Document2 pagesRenr5846 00Pauk HseinNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document13 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Wilbort Encomenderos Ruiz100% (1)
- 6420 - Hidráulico 10 MDocument2 pages6420 - Hidráulico 10 MGiovani Souza100% (1)
- MD6290 Rotary Blasthole Drill Hydraulic System With Linde PumpDocument2 pagesMD6290 Rotary Blasthole Drill Hydraulic System With Linde PumpDouglas Fernandes100% (1)
- Senr6336senr6336-01 Sis PDFDocument2 pagesSenr6336senr6336-01 Sis PDFJosé Ramírez OssandónNo ratings yet
- Cat Dcs Sis Controller PDFDocument2 pagesCat Dcs Sis Controller PDFNijaz SarajlićNo ratings yet
- Senr1668senr1668-01 Sis PDFDocument2 pagesSenr1668senr1668-01 Sis PDFDennis Olaya100% (1)
- 320, 320l & 320n Excavators - 9kk01359 - 3066 Engine Sistemas y ComponentesDocument2 pages320, 320l & 320n Excavators - 9kk01359 - 3066 Engine Sistemas y ComponentesLuis ValenzuelaNo ratings yet
- Cessna 172S (C172) - Normal and Emergency ChecklistsDocument2 pagesCessna 172S (C172) - Normal and Emergency ChecklistsalphaNo ratings yet
- Scematic Cooling 777E KYDDocument2 pagesScematic Cooling 777E KYDAgung WicaksonoNo ratings yet
- بوب كات دا ئرهDocument19 pagesبوب كات دا ئرهالشركه الهندسيه للهيدروليكNo ratings yet
- RENR5268-01: D5N and D6N Track-Type Tractor Hydraulic SystemDocument2 pagesRENR5268-01: D5N and D6N Track-Type Tractor Hydraulic SystemivanNo ratings yet
- 385C Excavator Hydraulic System (Attachment) : Fluid Power SymbolsDocument4 pages385C Excavator Hydraulic System (Attachment) : Fluid Power SymbolsLuis Valencia100% (1)
- Engine Control 3Document1 pageEngine Control 3Adin VifaldyNo ratings yet
- 330B Excavator Hydraulic Variable Gauge Undercarriage Hydraulic Systems - AttachmentDocument2 pages330B Excavator Hydraulic Variable Gauge Undercarriage Hydraulic Systems - Attachmentnilton acNo ratings yet
- 02 - Voltage Regulators-1Document21 pages02 - Voltage Regulators-1Yasir AbdooNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document10 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768hajarNo ratings yet
- Hydraulic Schematic 320c PAB PDFDocument2 pagesHydraulic Schematic 320c PAB PDFSergio Reyes100% (1)
- Block Diagram PDFDocument1 pageBlock Diagram PDFТатьяна ГарецNo ratings yet
- LH Drive Vehicles-03-01Document1 pageLH Drive Vehicles-03-01oretuertoyanapaNo ratings yet
- Senr1678senr1678 Sis PDFDocument2 pagesSenr1678senr1678 Sis PDFDennis OlayaNo ratings yet
- Sputtering Systems V1.0Document20 pagesSputtering Systems V1.0gavergaralNo ratings yet
- CS 563 Hydraulic PDFDocument2 pagesCS 563 Hydraulic PDFanggieNo ratings yet
- Electric RopDocument2 pagesElectric RopJair Ancelmo Villar PalominoNo ratings yet
- Hydraulic 2Document3 pagesHydraulic 2Satheesh GopindaranNo ratings yet
- Promass 80 - Description of Device FunctionsDocument68 pagesPromass 80 - Description of Device FunctionsMiguel Angel Diaz GuzmanNo ratings yet
- Aircon & Heating Electrical SystemDocument2 pagesAircon & Heating Electrical SystemFajrin niswatinNo ratings yet
- Basic CalculusDocument1 pageBasic CalculusErni Marvin genilsaNo ratings yet
- Si Nissan Sentra 03-05 - Curso 1a ParteDocument14 pagesSi Nissan Sentra 03-05 - Curso 1a PartePablo ChilinganoNo ratings yet
- توليد وإستخدامDocument1 pageتوليد وإستخدامtamann2004100% (1)
- 966f PDFDocument2 pages966f PDFhassan hamdyNo ratings yet
- Drawing1 Controller Design Unbalanced Eps Converted ToDocument1 pageDrawing1 Controller Design Unbalanced Eps Converted ToKumar AbhinavNo ratings yet
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Document7 pagesInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768jhak JASHANo ratings yet
- Chapter 03 REV 06 2009Document48 pagesChapter 03 REV 06 2009Alexander LopezNo ratings yet
- Electrical System PDFDocument95 pagesElectrical System PDFmohamed eissaNo ratings yet
- 307 SchematicDocument2 pages307 Schematicthan zaw winNo ratings yet
- 3002 Slid Electr in Put Out PutDocument36 pages3002 Slid Electr in Put Out Putyecner salvadorNo ratings yet
- Proline Promass 80: Description of Device FunctionsDocument70 pagesProline Promass 80: Description of Device FunctionsLuis Miguel Fernandez BejaranoNo ratings yet
- Extreme Temperature, High Load, Active Magnetic Bearings For Turbomachinery and ISG ApplicationsDocument15 pagesExtreme Temperature, High Load, Active Magnetic Bearings For Turbomachinery and ISG ApplicationsAshish32789No ratings yet
- Normal Check List C172RG I PVLBDocument2 pagesNormal Check List C172RG I PVLBalphaNo ratings yet
- Diagnostic Mode Entry and Functions PDFDocument41 pagesDiagnostic Mode Entry and Functions PDFDa ElNo ratings yet
- Blueprint Sheet E1Document1 pageBlueprint Sheet E1Harsh PatelNo ratings yet
- Sistema Hdco Generador M322Document2 pagesSistema Hdco Generador M322Eblyn Arlete Flores HernandezNo ratings yet
- 385B Excavators Hydraulic System - Attachment: Mya1-Up Rcd1-Up Bkf1-Up Ans1-Up Cls1-Up Bkx1-Up Bly1-UpDocument2 pages385B Excavators Hydraulic System - Attachment: Mya1-Up Rcd1-Up Bkf1-Up Ans1-Up Cls1-Up Bkx1-Up Bly1-UpFlorencio MaximilianoNo ratings yet
- STMG 2692Document156 pagesSTMG 2692Nova KurniawanNo ratings yet
- Description Tvs Iqube Tvs Iqube S Tvs Iqube ST System: VehicleDocument2 pagesDescription Tvs Iqube Tvs Iqube S Tvs Iqube ST System: VehicleSUDHEER RAM MANDAVANo ratings yet
- HEC05E02CC00ENG3Document1 pageHEC05E02CC00ENG3Stemblert Avila MacedoNo ratings yet
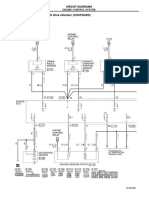
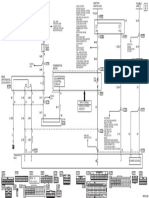
- B-34 Engine Control System: Circuit DiagramDocument6 pagesB-34 Engine Control System: Circuit Diagramlutfi shuibNo ratings yet
- Relay BOXDocument1 pageRelay BOXLuiz Ricardo StocoNo ratings yet
- Checklist EF Tecnam P-MentorDocument2 pagesChecklist EF Tecnam P-MentorjonathanaldazmNo ratings yet
- Dunk It. Rinse It. Immerse ItDocument2 pagesDunk It. Rinse It. Immerse ItBala GaneshNo ratings yet
- Aicte Sponsored 14 Days Summer Winter School FDTP Training Programme ONDocument2 pagesAicte Sponsored 14 Days Summer Winter School FDTP Training Programme ONBala GaneshNo ratings yet
- Anna University Chennai: About The InstitutionDocument2 pagesAnna University Chennai: About The InstitutionBala GaneshNo ratings yet
- Welcome To Centre 4 Research - Supervisors List Faculty Wise List PDFDocument47 pagesWelcome To Centre 4 Research - Supervisors List Faculty Wise List PDFBala GaneshNo ratings yet
- Cceti PDFDocument179 pagesCceti PDFBala GaneshNo ratings yet
- MPPT - DWG: Figure 1, Solar Panel Battery ChargerDocument3 pagesMPPT - DWG: Figure 1, Solar Panel Battery ChargerBala GaneshNo ratings yet
- Section 06 PROTECTORSDocument67 pagesSection 06 PROTECTORSYassin MuhssenNo ratings yet
- Thesis Uninterrupted Power SupplyDocument4 pagesThesis Uninterrupted Power Supplynadugnlkd100% (2)
- BS7671 17th Edition Electrical InstallDocument4 pagesBS7671 17th Edition Electrical InstallAnthony WilliamsNo ratings yet
- Firefly LED LightingDocument6 pagesFirefly LED Lightingkhraieric16No ratings yet
- Snubber Circuits Suppress Voltage Transient Spikes in Multiple Output DC-DC Flyback Converter Power SuppliesDocument11 pagesSnubber Circuits Suppress Voltage Transient Spikes in Multiple Output DC-DC Flyback Converter Power SuppliesPlatin1976No ratings yet
- Lecture - 6 - DC To DC (Choppers) - W2017 PDFDocument47 pagesLecture - 6 - DC To DC (Choppers) - W2017 PDFAhmad AliNo ratings yet
- Owner's Manual: Vertical/Horizontal 22 Ton Log SplitterDocument16 pagesOwner's Manual: Vertical/Horizontal 22 Ton Log SplitterRobertNo ratings yet
- Series 20T: Heavy Duty Gear ReducersDocument2 pagesSeries 20T: Heavy Duty Gear ReducersSalmanShaikhNo ratings yet
- AIR CONDITION SC018 - Usermanual - English - PDocument27 pagesAIR CONDITION SC018 - Usermanual - English - Pandrew2410mcd4805No ratings yet
- 2.0 Fsi Engine 1Document16 pages2.0 Fsi Engine 1Mohd FairusNo ratings yet
- Hearing Aid Circuit - Engineering ProjectsDocument6 pagesHearing Aid Circuit - Engineering ProjectsBsm GwapuNo ratings yet
- CMOSIC For Current-Mode PWM Power Supply: Hiroshi MaruyamaDocument6 pagesCMOSIC For Current-Mode PWM Power Supply: Hiroshi MaruyamaMalfo10No ratings yet
- IndofarmDocument9 pagesIndofarmer_bansaldheerajNo ratings yet
- Sistema de Implemento Presentaciones PDFDocument109 pagesSistema de Implemento Presentaciones PDFAbel Jairo Santos CabelloNo ratings yet
- Manual Wilden XPR860Document24 pagesManual Wilden XPR860Luis HenriqueNo ratings yet
- Interfacing 4x4 Keypad With 8051 MicrocontrollerDocument2 pagesInterfacing 4x4 Keypad With 8051 MicrocontrollerRakeshSai100% (1)
- MR ToolsDocument1 pageMR ToolsSainiRahulNo ratings yet
- Oil Seal Service BulletinDocument11 pagesOil Seal Service BulletinjisuuuNo ratings yet
- Level Wound Copper TubeDocument1 pageLevel Wound Copper TubeAamer Abdul MajeedNo ratings yet
- Proposal For An Advanced Embedded System Trainer ModuleDocument3 pagesProposal For An Advanced Embedded System Trainer ModuleSolomon AkpanNo ratings yet
- Pulsar Ns 160 Periodic MaintenanceDocument32 pagesPulsar Ns 160 Periodic MaintenanceJagadeesh KumarNo ratings yet
- Tamagawa Encoder Interface Protocol On AM437x Reference DesignDocument22 pagesTamagawa Encoder Interface Protocol On AM437x Reference DesignTrung Truc NguyenNo ratings yet
- Delta Ia-Plc As C en 20210916Document56 pagesDelta Ia-Plc As C en 20210916Diana Amaya NatividadNo ratings yet
- Networked Navigation System Nstallation AnualDocument56 pagesNetworked Navigation System Nstallation AnualsandyNo ratings yet
- Bike Frames For Sale - EbayDocument1 pageBike Frames For Sale - EbayamirsharifiNo ratings yet