You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Mona and John Listening AssessmentDocument2 pagesMona and John Listening AssessmentBash MatNo ratings yet
- Differences Between The Reading Approach and The Audio Lingual ApproachDocument1 pageDifferences Between The Reading Approach and The Audio Lingual ApproachBash MatNo ratings yet
- Mona and John Listening AssessmentDocument2 pagesMona and John Listening AssessmentBash MatNo ratings yet
- Mona and John Vocabulary ListDocument1 pageMona and John Vocabulary ListBash MatNo ratings yet
- Technical B-H SaturationDocument6 pagesTechnical B-H SaturationBash MatNo ratings yet
- American Powder Coatings, Inc.: Product Data SheetDocument1 pageAmerican Powder Coatings, Inc.: Product Data SheetBash MatNo ratings yet
- Flyer Current TransformerDocument24 pagesFlyer Current TransformerBash MatNo ratings yet
- Etch Primers PDFDocument1 pageEtch Primers PDFBash MatNo ratings yet
- TB01909001E Tab 17 PDFDocument22 pagesTB01909001E Tab 17 PDFBash MatNo ratings yet
- TB01909001E Tab 17 PDFDocument22 pagesTB01909001E Tab 17 PDFBash MatNo ratings yet
- TM Preface PDFDocument6 pagesTM Preface PDFBash MatNo ratings yet
- Shot Blasted and Primer Coated Heavy PlatesDocument7 pagesShot Blasted and Primer Coated Heavy PlatesBash MatNo ratings yet
- Technical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaDocument6 pagesTechnical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaBash MatNo ratings yet
- Testex Tape Product Data Sheet 122Document2 pagesTestex Tape Product Data Sheet 122Bash MatNo ratings yet
- Tender Notice For Repair of Dts - Pts & Maint1Document22 pagesTender Notice For Repair of Dts - Pts & Maint1Bash MatNo ratings yet
- Tender Notice For Repair of Dts - Pts & Maint1Document22 pagesTender Notice For Repair of Dts - Pts & Maint1Bash MatNo ratings yet
- Zinc Chromate PaintDocument2 pagesZinc Chromate PaintBash MatNo ratings yet
- Zinc Chromate PaintDocument2 pagesZinc Chromate PaintBash MatNo ratings yet
- Red Oxide PRIMERDocument1 pageRed Oxide PRIMERBash MatNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Microsoft Excel TutorialDocument90 pagesMicrosoft Excel Tutorialteacher.lexleo2782100% (1)
- HB-2048-001 1099590 QIAgility Unpacking and Installation GuideDocument4 pagesHB-2048-001 1099590 QIAgility Unpacking and Installation GuideSHOBHANo ratings yet
- Linear Programming Simple Word ProblemsDocument2 pagesLinear Programming Simple Word ProblemsWendy Millheiser Menard0% (1)
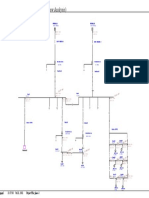
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDocument1 pageOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderNo ratings yet
- CSE101 Computer Programming: Lecture #0Document28 pagesCSE101 Computer Programming: Lecture #0t iwariNo ratings yet
- B.Tech (PT) - Mathematics - II YEAR - III SEM - (R) 2012 PDFDocument15 pagesB.Tech (PT) - Mathematics - II YEAR - III SEM - (R) 2012 PDFmohamed irshadNo ratings yet
- The GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsDocument8 pagesThe GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsJesús UrrietaNo ratings yet
- Tutorial 12 13 14 BBBL2023Document16 pagesTutorial 12 13 14 BBBL2023YANG YUN RUINo ratings yet
- D00000652 ANT Message Protocol and Usage Rev 5.0Document127 pagesD00000652 ANT Message Protocol and Usage Rev 5.0Gui ArieviloNo ratings yet
- Anaya BachilleratoDocument24 pagesAnaya Bachilleratogabriel simunovic0% (5)
- Netflix 1Document22 pagesNetflix 1CarmenNo ratings yet
- 3.4.4 Lab - Research Networking StandardsDocument5 pages3.4.4 Lab - Research Networking StandardsCT KHNo ratings yet
- VG278 Series LCD Monitor User GuideDocument24 pagesVG278 Series LCD Monitor User GuideEdsel LoquillanoNo ratings yet
- Hydro-Probe: Digital Microwave Moisture Sensor For Bins, Silos and ConveyorsDocument4 pagesHydro-Probe: Digital Microwave Moisture Sensor For Bins, Silos and ConveyorsJulio CaychoNo ratings yet
- PP 90264 LIMS Integration Compliance ArabLab2017 PP90264 enDocument25 pagesPP 90264 LIMS Integration Compliance ArabLab2017 PP90264 enPaten PisanNo ratings yet
- User Authentication-Passwords, Biometrics and AlternativesDocument36 pagesUser Authentication-Passwords, Biometrics and AlternativesReza EsnaashariNo ratings yet
- Eee (C) Shivani IterDocument49 pagesEee (C) Shivani Itervishal HarshNo ratings yet
- Final NiDocument17 pagesFinal NiAllysa D.R RemosNo ratings yet
- Bumble BizzDocument38 pagesBumble BizzAxel RomanoNo ratings yet
- MclustDocument57 pagesMclustfilip_nenadicNo ratings yet
- Hathway BillDocument1 pageHathway BillSanthoshkumar.Jayaram (CareerNet)No ratings yet
- Assignment 04 SolutionDocument3 pagesAssignment 04 Solutionmaroua.sayahNo ratings yet
- ACS350 Technical CatalogueDocument20 pagesACS350 Technical CatalogueJNo ratings yet
- Year 6 Week 1 Lesson 1 Main Focus Prior Knowledge Key Vocabulary Curriculum ObjectivesDocument19 pagesYear 6 Week 1 Lesson 1 Main Focus Prior Knowledge Key Vocabulary Curriculum Objectiveslenson kinyuaNo ratings yet
- Transactions &ConcurrencyControlDocument40 pagesTransactions &ConcurrencyControlDavid KhadkaNo ratings yet
- Regional Memo No. 058 S. 2022 Call For Proposals and Interim Guidelines For Basic Education Research Fund 2022 1Document40 pagesRegional Memo No. 058 S. 2022 Call For Proposals and Interim Guidelines For Basic Education Research Fund 2022 1Maestra Ligaya Maria YojNo ratings yet
- Check-Uy, Margarita Luisa S.Document6 pagesCheck-Uy, Margarita Luisa S.Marco UyNo ratings yet
- Solar Wireless Electric Vehicle Charging System: June 2022Document8 pagesSolar Wireless Electric Vehicle Charging System: June 2022Niamatullah WazirNo ratings yet
- Fdp-Aiml 2019 PDFDocument20 pagesFdp-Aiml 2019 PDFkrishna_marlaNo ratings yet
- Chapter Seven Capacitors and InductorsDocument10 pagesChapter Seven Capacitors and InductorsVimala ElumalaiNo ratings yet