You might also like
- Bilinear Interpolation: Enhancing Image Resolution and Clarity through Bilinear InterpolationFrom EverandBilinear Interpolation: Enhancing Image Resolution and Clarity through Bilinear InterpolationNo ratings yet
- Getting Started MobosimDocument4 pagesGetting Started MobosimRudy RachidaNo ratings yet
- Data Sheet Pompa SentrifugalDocument2 pagesData Sheet Pompa Sentrifugalsiaga 1No ratings yet
- Laporan Praktikum SISDIG MODUL 2 Pengenalan Design Menggunakan FPGADocument17 pagesLaporan Praktikum SISDIG MODUL 2 Pengenalan Design Menggunakan FPGAAnjuSilitonga100% (1)
- X (T) 10 Cos (WDocument1 pageX (T) 10 Cos (Wfadjrianah21No ratings yet
- Iot Based System For Heart Rate Monitoring IJERTV9IS070673Document9 pagesIot Based System For Heart Rate Monitoring IJERTV9IS070673Penrose LearningNo ratings yet
- Sambungan P-N Dan Dioda Sambungan P-NDocument27 pagesSambungan P-N Dan Dioda Sambungan P-NUlfie Kusuma Wardhani100% (1)
- Perhitungan Flyback ConverterDocument4 pagesPerhitungan Flyback ConverterMardian SatriaNo ratings yet
- Performance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMDocument7 pagesPerformance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMhusseinNo ratings yet
- ExamplesDocument5 pagesExamplesanjanaNo ratings yet
- Robotics: Representing Position and OrientationDocument20 pagesRobotics: Representing Position and OrientationBagusAdiwiluhungNo ratings yet
- SoMachine Basic User Interface BasicsDocument316 pagesSoMachine Basic User Interface BasicsFrank Azola ArayaNo ratings yet
- Kecerdasan Buatan: Artificial IntelligenceDocument30 pagesKecerdasan Buatan: Artificial IntelligenceWahyu HPNo ratings yet
- ASGN Ethernet Loopback DesignDocument4 pagesASGN Ethernet Loopback DesignsenthilNo ratings yet
- SM-4.2 Desain Rangkaian SekuensialDocument23 pagesSM-4.2 Desain Rangkaian SekuensialIda Bagus Yudistira AnggradanaNo ratings yet
- TDD3500 Link Budget SampleDocument7 pagesTDD3500 Link Budget SampleRaul Rambo LongboenNo ratings yet
- A Strategy For Undervoltage Load Shedding in Power Systems PDFDocument5 pagesA Strategy For Undervoltage Load Shedding in Power Systems PDFSyaifuddinZuhriNo ratings yet
- Kelompok 6 - Boundary Element MethodDocument52 pagesKelompok 6 - Boundary Element MethodChandra Andi SaputraNo ratings yet
- Materi 7 - Parameter Cell Site DesignDocument11 pagesMateri 7 - Parameter Cell Site DesignfarrasNo ratings yet
- Modul 3 - PLC - Adc and DacDocument6 pagesModul 3 - PLC - Adc and DacAnton IoNo ratings yet
- Sistem Pengendali LiftDocument20 pagesSistem Pengendali LiftSyam Aji100% (1)
- Parallel AdderDocument20 pagesParallel AddermdbelalrshdNo ratings yet
- Universal Power Supply (Dc/Ac) With Function Generator: Lucas Nülle GMBH Page 1/1 WWW - Lucas-Nuelle - UsDocument1 pageUniversal Power Supply (Dc/Ac) With Function Generator: Lucas Nülle GMBH Page 1/1 WWW - Lucas-Nuelle - Usabbas ahmedNo ratings yet
- Step Perancangan Filter Digital IIRDocument31 pagesStep Perancangan Filter Digital IIRIndomi doubleNo ratings yet
- BAS Digital Direct Control: FunctionDocument1 pageBAS Digital Direct Control: FunctionHai Le0% (1)
- PID Control Buck Converter by Using Arduino UNODocument52 pagesPID Control Buck Converter by Using Arduino UNOveerakumar BITNo ratings yet
- Laboratory Exercise 1: Discrete-Time Signals: Time-Domain RepresentationDocument13 pagesLaboratory Exercise 1: Discrete-Time Signals: Time-Domain RepresentationNguyễn HưngNo ratings yet
- Skema Oppo 1201 1Document14 pagesSkema Oppo 1201 1ahmad riza virsNo ratings yet
- Static Calibration Procedure: 1. Do The Zero Correction in The MenuDocument7 pagesStatic Calibration Procedure: 1. Do The Zero Correction in The Menureinelvillar100% (1)
- Memoria Ram 6264Document14 pagesMemoria Ram 6264DOMINGOS ALADIRNo ratings yet
- Field Effect Transistor: Drs - Dedi Supardi, MMDocument34 pagesField Effect Transistor: Drs - Dedi Supardi, MMDedi SupardiNo ratings yet
- Transfer Function ProsesDocument34 pagesTransfer Function ProsesMalasari NasutionNo ratings yet
- GP1A30R: OPIC Photointerrupter With Encoder FunctionDocument4 pagesGP1A30R: OPIC Photointerrupter With Encoder FunctionnospherathusNo ratings yet
- LfnewtonDocument3 pagesLfnewtonGopiNo ratings yet
- Probabilistic Seismic Hazard Analysis of Kathmandu ValleyDocument100 pagesProbabilistic Seismic Hazard Analysis of Kathmandu ValleySuraj Ojha100% (1)
- LG mc059c Chassis 21fs4rg TV SMDocument31 pagesLG mc059c Chassis 21fs4rg TV SMDusmantha Anandaratne100% (1)
- MARIE Simulator MARIE Simulator: Dr. Qi Zhu Zhuq@uhv - EduDocument23 pagesMARIE Simulator MARIE Simulator: Dr. Qi Zhu Zhuq@uhv - Eduttt4234No ratings yet
- Universal USB Installer - Easy As 1 2 3 - USB Pen Drive LinuxDocument4 pagesUniversal USB Installer - Easy As 1 2 3 - USB Pen Drive LinuxAishwarya GuptaNo ratings yet
- VHDL Piano Using Xilink Sparta BoardDocument12 pagesVHDL Piano Using Xilink Sparta Boardjasmine-rNo ratings yet
- 1a-Sensor Resistif-1 PDFDocument45 pages1a-Sensor Resistif-1 PDFSat SatrioNo ratings yet
- Jawaban Soal Opdal 3.1 PDFDocument4 pagesJawaban Soal Opdal 3.1 PDFYudi SaputraNo ratings yet
- Laporan Resmi Analog Input (ADC) : PercobaanDocument4 pagesLaporan Resmi Analog Input (ADC) : PercobaantelkomNo ratings yet
- Digital Filter Design For Classifying Coconut Ages Using Blackman FIRDocument7 pagesDigital Filter Design For Classifying Coconut Ages Using Blackman FIRdiana rahmawatiNo ratings yet
- Determining Beta Factor For A 2N2222 TransistorDocument2 pagesDetermining Beta Factor For A 2N2222 TransistorJuan Carlos Morales ParraNo ratings yet
- Tugas Transmisi Daya ListrikDocument4 pagesTugas Transmisi Daya ListrikYordan RakaNo ratings yet
- Matlab Installation Guide - R2016bDocument10 pagesMatlab Installation Guide - R2016bMohammed Abdul HaiNo ratings yet
- Control Lab Report Experiment No. 05Document2 pagesControl Lab Report Experiment No. 05Nahin AminNo ratings yet
- Laporan Praktikum Modul 4 Multiplexer Dan DemultiplexerDocument14 pagesLaporan Praktikum Modul 4 Multiplexer Dan DemultiplexerAbdul azisNo ratings yet
- Week 5 Bahasa Inggris TeknikDocument8 pagesWeek 5 Bahasa Inggris Teknikmorning starNo ratings yet
- Mo DSS P: '4. What Is The Value of GDocument18 pagesMo DSS P: '4. What Is The Value of GBryan VidanesNo ratings yet
- Layout Fasilitas Power House: SCALE 1:50Document1 pageLayout Fasilitas Power House: SCALE 1:50Ihsan RamadhanNo ratings yet
- Oscilloscope and Signal Generator in LabviewDocument9 pagesOscilloscope and Signal Generator in LabviewAli ShafiqueNo ratings yet
- Deteksi Kerusakan Motor InduksiDocument7 pagesDeteksi Kerusakan Motor InduksifaturNo ratings yet
- Counter Using LDRDocument19 pagesCounter Using LDRCha KuNo ratings yet
- A Development Platform For Microcontroller STM32F103Document67 pagesA Development Platform For Microcontroller STM32F103picatilioNo ratings yet
- Seabat T20-P: High Resolution Multibeam EchosounderDocument2 pagesSeabat T20-P: High Resolution Multibeam EchosounderhaqquramdhaniNo ratings yet
- Coe4Tn3 Image Processing: Wavelet and Multiresolution Wavelet and Multiresolution ProcessingDocument9 pagesCoe4Tn3 Image Processing: Wavelet and Multiresolution Wavelet and Multiresolution ProcessingAbdela Aman MtechNo ratings yet
- 1 EdgeDocument140 pages1 EdgejosnaNo ratings yet
- New Dislin Features Since Version 11.0Document6 pagesNew Dislin Features Since Version 11.0alorenzo66No ratings yet
- Signal Processing Final Project Report On Multirate Signal ProcessingDocument9 pagesSignal Processing Final Project Report On Multirate Signal ProcessingDhruv HirparaNo ratings yet
- Data Visualization For The Understanding of COVID-19Document6 pagesData Visualization For The Understanding of COVID-19John JNo ratings yet
- CSV Python AnnotatedDocument27 pagesCSV Python AnnotatedSuman DasNo ratings yet
- KEM DensitometersDocument8 pagesKEM DensitometersTank Top 2No ratings yet
- Huawei OMC IManager M2000 Engineering Parameters IntroductionDocument11 pagesHuawei OMC IManager M2000 Engineering Parameters IntroductionaricomenNo ratings yet
- 2019 - 2 - Advertisement No 3-2019 (Various Posts)Document9 pages2019 - 2 - Advertisement No 3-2019 (Various Posts)Shubham GautamNo ratings yet
- H31 411 HCNA LTE Exam DumpsDocument13 pagesH31 411 HCNA LTE Exam DumpsAbu DaoudNo ratings yet
- Digital Modulation HandoutDocument18 pagesDigital Modulation HandoutAyham ALZABEN (AZMiKs)No ratings yet
- Math Rs Main QuestionDocument4 pagesMath Rs Main QuestionYoutube PremiumNo ratings yet
- Module 1 Quiz - Coursera166Document1 pageModule 1 Quiz - Coursera166Luai DoumetNo ratings yet
- EPC Control Wiring Applications 836269cDocument110 pagesEPC Control Wiring Applications 836269cdylan_dearing@hotmail.comNo ratings yet
- Cartilla Informativa Plan LectorDocument11 pagesCartilla Informativa Plan LectorHilarioPaniuraHuayhuaNo ratings yet
- 50PX75U Service ManualDocument132 pages50PX75U Service Manualvanpye00No ratings yet
- 2G Flexi EdgeDocument137 pages2G Flexi EdgeBaleanu SilviuNo ratings yet
- 5.antennas in LTE NetworksDocument50 pages5.antennas in LTE NetworksABHISHEK AGARWALNo ratings yet
- Faceless LL 2Document59 pagesFaceless LL 2mnabcNo ratings yet
- Vdocuments - MX Pampanga Temie2Document48 pagesVdocuments - MX Pampanga Temie2Mark Daniel DequinaNo ratings yet
- Senior Engineer SW AutosarDocument2 pagesSenior Engineer SW AutosarDeepak Kumar RautNo ratings yet
- ASCII CodesDocument17 pagesASCII CodesAndleeb RazzaqNo ratings yet
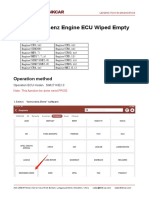
- Mercedes Benz Engine ECU Wiped EmptyDocument9 pagesMercedes Benz Engine ECU Wiped EmptyP BNo ratings yet
- Trunking Radio System TETRADocument21 pagesTrunking Radio System TETRAMihsah Exttreme50% (2)
- BSNL VMC AN1020-21 (Detailed Visual Guide)Document14 pagesBSNL VMC AN1020-21 (Detailed Visual Guide)Nagaraju Gunturu100% (1)
- Optimal Design of Cryogenic Air Separation Columns Under UncertaintyDocument29 pagesOptimal Design of Cryogenic Air Separation Columns Under UncertaintyMichael SherriffNo ratings yet
- 4526 R430 01Document256 pages4526 R430 01nasiruddin276100% (1)
- Small and Thin 2 G Accelerometer ADXL322: Features General DescriptionDocument16 pagesSmall and Thin 2 G Accelerometer ADXL322: Features General DescriptionPrateek AgrawalNo ratings yet
- SAP QM Calibration MethodDocument3 pagesSAP QM Calibration MethodvrkattulaNo ratings yet
- What Is Github Actions?: Benefits and ExamplesDocument13 pagesWhat Is Github Actions?: Benefits and Examplesniraj kulhariNo ratings yet
- Small Animal Radiology and Ultrasound A Diagnostic Atlas and TextDocument728 pagesSmall Animal Radiology and Ultrasound A Diagnostic Atlas and TextAndrzej Milczak100% (3)
- Codding Tugas Akhir DPK 1Document2 pagesCodding Tugas Akhir DPK 1Nicco ComputerNo ratings yet
- Retrostar (Quick Play)Document42 pagesRetrostar (Quick Play)Stephen SandersNo ratings yet
- Coimbatore CompaniesDocument3 pagesCoimbatore CompaniesSivakumar Subramaniam0% (1)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyFrom EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyRating: 3.5 out of 5 stars3.5/5 (111)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Cyber War: The Next Threat to National Security and What to Do About ItFrom EverandCyber War: The Next Threat to National Security and What to Do About ItRating: 3.5 out of 5 stars3.5/5 (66)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyFrom EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyRating: 4 out of 5 stars4/5 (51)
- Algorithms to Live By: The Computer Science of Human DecisionsFrom EverandAlgorithms to Live By: The Computer Science of Human DecisionsRating: 4.5 out of 5 stars4.5/5 (722)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumFrom EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumRating: 3 out of 5 stars3/5 (12)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4 out of 5 stars4/5 (6)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- The E-Myth Revisited: Why Most Small Businesses Don't Work andFrom EverandThe E-Myth Revisited: Why Most Small Businesses Don't Work andRating: 4.5 out of 5 stars4.5/5 (709)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (229)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- The Bitcoin Standard: The Decentralized Alternative to Central BankingFrom EverandThe Bitcoin Standard: The Decentralized Alternative to Central BankingRating: 4.5 out of 5 stars4.5/5 (41)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerFrom EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerRating: 4.5 out of 5 stars4.5/5 (44)
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesFrom EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesNo ratings yet