You might also like
- 01 DifferentialEquations Complete PDFDocument18 pages01 DifferentialEquations Complete PDFOğuzhan KocaNo ratings yet
- 01 DifferentialEquations Complete PDFDocument18 pages01 DifferentialEquations Complete PDFOğuzhan KocaNo ratings yet
- Equivalent Air Spring Suspension Model For Quarter-PassiveDocument7 pagesEquivalent Air Spring Suspension Model For Quarter-PassiveOğuzhan KocaNo ratings yet
- Whitepaper - Bolted ConnectionsDocument18 pagesWhitepaper - Bolted ConnectionsOğuzhan KocaNo ratings yet
- Beam Theories The Difference Between Euler-Bernoulli and TimoschenkoDocument8 pagesBeam Theories The Difference Between Euler-Bernoulli and TimoschenkoRenit Sam100% (1)
- RBEs and MPCs in MSC - Nastran2Document94 pagesRBEs and MPCs in MSC - Nastran2NNZkhanNo ratings yet
- Effects of Analysis Method, Bolt Pre-Stress, and Cover Plate Thickness On The Behavior of Bolted Flanges of Different SizesDocument51 pagesEffects of Analysis Method, Bolt Pre-Stress, and Cover Plate Thickness On The Behavior of Bolted Flanges of Different SizesOğuzhan KocaNo ratings yet
- Mechanical Intro 15.0 L09 Vibration AnalysisDocument13 pagesMechanical Intro 15.0 L09 Vibration AnalysisTrolldaddyNo ratings yet
- Advanced Strength and Applied ElasticityDocument280 pagesAdvanced Strength and Applied Elasticityvipulugale67% (3)
- DM-Intro 15.0 L02 Introduction To WBDocument12 pagesDM-Intro 15.0 L02 Introduction To WBOğuzhan KocaNo ratings yet
- 2008015655Document20 pages2008015655mghgolNo ratings yet
- Design of Wind Turbine Tower and Foundation Systems - OptimizationDocument71 pagesDesign of Wind Turbine Tower and Foundation Systems - OptimizationOğuzhan KocaNo ratings yet
- Whitepaper - Bolted ConnectionsDocument18 pagesWhitepaper - Bolted ConnectionsOğuzhan KocaNo ratings yet
- Design, Construction and Testing of A Wheelchair-Mounted Robotic ArmDocument79 pagesDesign, Construction and Testing of A Wheelchair-Mounted Robotic ArmOğuzhan KocaNo ratings yet
- Robotic Arm Manipulator For Industrial PurposeDocument20 pagesRobotic Arm Manipulator For Industrial PurposeOğuzhan KocaNo ratings yet
- CATIA AssemblyDocument53 pagesCATIA AssemblyOğuzhan KocaNo ratings yet
- VENTILATING Squash Room Air RequirementsDocument4 pagesVENTILATING Squash Room Air RequirementsOğuzhan KocaNo ratings yet
- Rocket Physcs-EngineeringDocument18 pagesRocket Physcs-EngineeringOğuzhan KocaNo ratings yet
- CATIA AssemblyDocument53 pagesCATIA AssemblyOğuzhan KocaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Modulus Young GiancoliDocument3 pagesModulus Young GiancoliTakeru ShibaNo ratings yet
- Mathcad - 02. Analysis of Singly Reinforced Concrete Beam.Document3 pagesMathcad - 02. Analysis of Singly Reinforced Concrete Beam.MrAlittle FingerNo ratings yet
- AGA8Document6 pagesAGA8Bled GegaNo ratings yet
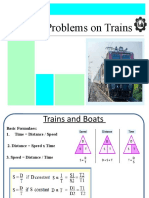
- Trains and Boats FinalDocument52 pagesTrains and Boats FinalSurya AnjuNo ratings yet
- (PDF) (EPUB) Classical Mechanics Ab Gupta DownloadDocument3 pages(PDF) (EPUB) Classical Mechanics Ab Gupta DownloadSubham Paul11% (9)
- FinnedTubeCFD Final DraftDocument17 pagesFinnedTubeCFD Final DraftHai Nguyen CongNo ratings yet
- Sheet 1 PDFDocument5 pagesSheet 1 PDFAnonymous hdjbt4waj7No ratings yet
- Simulation of Viscous Fingers Developed in Lifting Plate Hele-Shaw Cell in Volume of Fluid ModelDocument8 pagesSimulation of Viscous Fingers Developed in Lifting Plate Hele-Shaw Cell in Volume of Fluid ModelChetna SharmaNo ratings yet
- Physics Project Work 387 - Xii - HDocument13 pagesPhysics Project Work 387 - Xii - HDurgesh Yadav67% (3)
- First Year Phyiscs Ipe Imp Q.bank 2020-2021 - (Hyderad Centres)Document26 pagesFirst Year Phyiscs Ipe Imp Q.bank 2020-2021 - (Hyderad Centres)Varun Sai SundalamNo ratings yet
- Dynamic Response of RC Frame Building Using Base IsolatorsDocument43 pagesDynamic Response of RC Frame Building Using Base IsolatorsHamid HassanzadaNo ratings yet
- 52-Forced Convection - Bank of Tubes (With Numericals) - 13-Sep-2019Material - I - 13-Sep-2019 - Bank - of - Tubes PDFDocument7 pages52-Forced Convection - Bank of Tubes (With Numericals) - 13-Sep-2019Material - I - 13-Sep-2019 - Bank - of - Tubes PDFsiva yandraNo ratings yet
- Walking on a Sphere Tutorial Explores Custom GravityDocument20 pagesWalking on a Sphere Tutorial Explores Custom GravityKhatami OnikNo ratings yet
- Reflection Refraction and DiffractionDocument9 pagesReflection Refraction and DiffractionWafa AlkilaniNo ratings yet
- Thermodynamics 2Document4 pagesThermodynamics 2Martono Dwi SNo ratings yet
- Science 7 3RD Q 1Document486 pagesScience 7 3RD Q 1NERALDIN OGORIDANo ratings yet
- Bernoulli's Theorem ProofDocument2 pagesBernoulli's Theorem ProofSourav Das50% (4)
- Gauss' Law: Spherical SymmetryDocument8 pagesGauss' Law: Spherical Symmetrysudhansh kumarNo ratings yet
- PHD Thesis Catalogue Year Student Thesis Title at 20/08/2012Document8 pagesPHD Thesis Catalogue Year Student Thesis Title at 20/08/2012Deepak AnandanNo ratings yet
- NSCPDocument53 pagesNSCPZaela EfronNo ratings yet
- Comparison of Rayleigh-Sommerfeld and Fresnel Solutions For Axial PointsDocument3 pagesComparison of Rayleigh-Sommerfeld and Fresnel Solutions For Axial Points廖宇轩No ratings yet
- Force and Motion LessonsDocument2 pagesForce and Motion LessonsAriane Nicole Barayang DamianNo ratings yet
- 201 Lab 7. Work and EnergyDocument9 pages201 Lab 7. Work and EnergydermaNo ratings yet
- Standing Waves in Sheets of Material PDFDocument10 pagesStanding Waves in Sheets of Material PDFpaul catalinNo ratings yet
- An Example Problem On Wind Load Calculation According To NSCP 2010Document2 pagesAn Example Problem On Wind Load Calculation According To NSCP 2010JapoyNo ratings yet
- Tutorial 1 (Chapter 11a)Document2 pagesTutorial 1 (Chapter 11a)EcoliNo ratings yet
- Assignment: Small Signal Stability: Task1Document13 pagesAssignment: Small Signal Stability: Task1Nouman ChoudhryNo ratings yet
- Presentation On Macroscopic and Microscopic ApproachDocument9 pagesPresentation On Macroscopic and Microscopic ApproachPrithwish Kr SutradharNo ratings yet
- Interview Questions and Answers on Structural EngineeringDocument3 pagesInterview Questions and Answers on Structural EngineeringPradeep KumarNo ratings yet