You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Stand-alone PWM voltage-source inverter design and operationDocument10 pagesStand-alone PWM voltage-source inverter design and operationxenotargetNo ratings yet
- Guide To Surge ProtectionDocument68 pagesGuide To Surge Protectionm.abdelsalam772570No ratings yet
- ABB 3HAC050988 AM Arc and Arc Sensor RW 6-En PDFDocument238 pagesABB 3HAC050988 AM Arc and Arc Sensor RW 6-En PDForefat1No ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Citric Acid Passivation of Stainless SteelDocument41 pagesCitric Acid Passivation of Stainless Steelnqh2009100% (2)
- P1457 2010apr B Relay VitalDocument226 pagesP1457 2010apr B Relay VitalElton RibeiroNo ratings yet
- Adeptus Evangelion 2.5 - Operations ManualDocument262 pagesAdeptus Evangelion 2.5 - Operations ManualGhostwheel50% (2)
- Speed Control of DC Motor Using PDocument22 pagesSpeed Control of DC Motor Using PAnanth Sai YadavNo ratings yet
- 5s OfficeDocument10 pages5s OfficeTechie InblueNo ratings yet
- Ford 1982 3.8L V6Document22 pagesFord 1982 3.8L V6sc100% (1)
- State of The Art Penelitian - Chat GPT 2023Document137 pagesState of The Art Penelitian - Chat GPT 2023restyNo ratings yet
- Relays FOR RAILWAY SIGNALINGDocument26 pagesRelays FOR RAILWAY SIGNALINGVikas Srivastav98% (51)
- MATH8-Relations and Functions Worksheet AnswersDocument15 pagesMATH8-Relations and Functions Worksheet AnswersRhealyn Joy Narciso100% (2)
- Commissioning of DAVRDocument70 pagesCommissioning of DAVRPMG Bhuswal Project100% (1)
- Biology BIOL 1003 CH 1-3 QuizDocument14 pagesBiology BIOL 1003 CH 1-3 QuizYummyWords100% (1)
- Point Machine FOR RAILWAY SIGNALINGDocument32 pagesPoint Machine FOR RAILWAY SIGNALINGVikas Srivastav98% (51)
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 pagesApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNo ratings yet
- Driver Motor PDFDocument6 pagesDriver Motor PDFjuarezNo ratings yet
- Mto Ev005 Tb67s109aftgDocument7 pagesMto Ev005 Tb67s109aftgTrịnh Thanh TàiNo ratings yet
- Thb7128 InstructionsDocument9 pagesThb7128 InstructionsanhxcoNo ratings yet
- Fan 7314Document14 pagesFan 7314Kamal NonekNo ratings yet
- Closed Loop Speed Control of PMDC MotorDocument6 pagesClosed Loop Speed Control of PMDC MotorVignesh WaranNo ratings yet
- L6565Document18 pagesL6565Sergio Daniel BarretoNo ratings yet
- DatasheetDocument9 pagesDatasheetnipunkhatriNo ratings yet
- TA8251AH: Max Power 30W BTL × 4ch Audio Power ICDocument13 pagesTA8251AH: Max Power 30W BTL × 4ch Audio Power ICРамиль Невмянов100% (1)
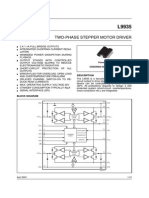
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- High Voltage Resonant Controller: DescriptionDocument17 pagesHigh Voltage Resonant Controller: DescriptionJesus SilvaNo ratings yet
- Data SheetDocument17 pagesData SheetSaprinus SapNo ratings yet
- CYCLOCONVERTERSDocument46 pagesCYCLOCONVERTERSHari HaranNo ratings yet
- FSDM07652R DatasheetDocument16 pagesFSDM07652R Datasheetmarianos67No ratings yet
- Datasheet Uc3810nDocument15 pagesDatasheet Uc3810nCarlos IbaNo ratings yet
- UCC35702Document24 pagesUCC35702Malay K GhoshNo ratings yet
- HV9971Document10 pagesHV9971Jazmin JorgeNo ratings yet
- FT8260 1x AN Rev0.81Document15 pagesFT8260 1x AN Rev0.81Enéas BaroneNo ratings yet
- Intelligent CCFL Inverter Controller: FeaturesDocument12 pagesIntelligent CCFL Inverter Controller: FeaturesMirosław DżumakNo ratings yet
- LIC Unit IVDocument32 pagesLIC Unit IVDINESH KUMAR DRAVIDAMANINo ratings yet
- ECN3021Document10 pagesECN3021Wasang Juwi PracihnoNo ratings yet
- VP2128 Viva ElectronicsDocument12 pagesVP2128 Viva ElectronicsAlejandra SeguraNo ratings yet
- Saa1042v PDFDocument7 pagesSaa1042v PDFVinny TukNo ratings yet
- Uba2071 ADocument35 pagesUba2071 AKlaus PurkeNo ratings yet
- Oz9938 PDFDocument12 pagesOz9938 PDFCarlosNo ratings yet
- Advantages of Matrix Over CycloconvertersDocument46 pagesAdvantages of Matrix Over CycloconvertersnazaahaNo ratings yet
- Arduino 220V Full Wave Controlled Bridge Rectifier - Simple CircuitDocument15 pagesArduino 220V Full Wave Controlled Bridge Rectifier - Simple CircuitbasharfarhanNo ratings yet
- PWM ControllerDocument20 pagesPWM ControllerAmrit203No ratings yet
- Hef 4752Document9 pagesHef 4752onlyvinod56No ratings yet
- FP 6321Document11 pagesFP 6321Ahmed HussainNo ratings yet
- Ucc 2889Document15 pagesUcc 2889Ahmad Zulfani MadanNo ratings yet
- MITSUBISHI PS21245-E 4th Gen IGBT Inverter ModuleDocument9 pagesMITSUBISHI PS21245-E 4th Gen IGBT Inverter ModulepukymottoNo ratings yet
- Ltc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching RegulatorsDocument28 pagesLtc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching Regulatorscatsoithahuong84No ratings yet
- Uc 3872 DWDocument8 pagesUc 3872 DWCarlos CuebasNo ratings yet
- Linear Technology LTC3728EG28400Document37 pagesLinear Technology LTC3728EG28400Rickz2k8No ratings yet
- 161 20551 0 FS7M0880Document16 pages161 20551 0 FS7M0880Edwin Vitovis TorresNo ratings yet
- PM 150 CSD 120Document7 pagesPM 150 CSD 120elecompinnNo ratings yet
- 45W Audio Amplifier ChipDocument16 pages45W Audio Amplifier ChipJohn Keneth VasquezNo ratings yet
- ECE 8830 CycloconvertersDocument46 pagesECE 8830 CycloconvertersbasabNo ratings yet
- Bistable Multivibrator Circuits and OperationDocument30 pagesBistable Multivibrator Circuits and OperationTurkish GatxyNo ratings yet
- PF I V PF I V PF I V P P: I Computing The Power in A Three Phase MotorDocument4 pagesPF I V PF I V PF I V P P: I Computing The Power in A Three Phase MotorsaneempNo ratings yet
- MC1455Document13 pagesMC1455eduardolsNo ratings yet
- Ps 11034Document5 pagesPs 11034Tanvon MalikNo ratings yet
- Design Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED LightingDocument13 pagesDesign Guideline of AC-DC Converter Using FL6961 & FL6300A For 70W LED Lightingshiva1luNo ratings yet
- Single Ended Active Clamp/Reset PWM: Features DescriptionDocument16 pagesSingle Ended Active Clamp/Reset PWM: Features Descriptioncatsoithahuong84No ratings yet
- Buck Converter Simulation Using ArduinoDocument4 pagesBuck Converter Simulation Using Arduinoxces 2312No ratings yet
- EG1000Document12 pagesEG1000alizanelectronicNo ratings yet
- CD 00000063Document11 pagesCD 00000063api-306853111No ratings yet
- Vco WDocument8 pagesVco Wapi-3725139No ratings yet
- Optimize Motor Drive Inverter Module Application NoteDocument10 pagesOptimize Motor Drive Inverter Module Application Notevishwa_001No ratings yet
- Current Controller For Stepping Motors: DescriptionDocument8 pagesCurrent Controller For Stepping Motors: Descriptiontryu40No ratings yet
- An H50Document4 pagesAn H50Hugo RojasNo ratings yet
- LT1618 DatasheetDocument16 pagesLT1618 DatasheetkurabyqldNo ratings yet
- Toshiba Bipolar IC Drives DC MotorsDocument14 pagesToshiba Bipolar IC Drives DC MotorsrikyNo ratings yet
- VBA Book PDFDocument121 pagesVBA Book PDFAriadiKetutNo ratings yet
- Australian Railway Association PDFDocument25 pagesAustralian Railway Association PDFElton RibeiroNo ratings yet
- V6i5 0212Document4 pagesV6i5 0212Devi AriNo ratings yet
- The Nature of LightDocument15 pagesThe Nature of Lightgeopaok165No ratings yet
- Lightning Surge Protection-Libre PDFDocument14 pagesLightning Surge Protection-Libre PDFElton RibeiroNo ratings yet
- DatasheetDocument2 pagesDatasheetElton RibeiroNo ratings yet
- AN3476Document28 pagesAN3476Elton RibeiroNo ratings yet
- Transformers, Cooling Methods and WindingsDocument6 pagesTransformers, Cooling Methods and WindingsElton RibeiroNo ratings yet
- Railway Signalling Based On Wireless Sensor NetworksDocument25 pagesRailway Signalling Based On Wireless Sensor NetworksSandeep PatalayNo ratings yet
- DatasheetDocument3 pagesDatasheetElton RibeiroNo ratings yet
- TMPM370 Group Product Introduction GuideDocument60 pagesTMPM370 Group Product Introduction GuideElton Ribeiro100% (1)
- TMPM374FWUG Errata en 20160531Document1 pageTMPM374FWUG Errata en 20160531Elton RibeiroNo ratings yet
- Microcontrollers - TOSHIBA Storage & Electronic Devices Solutions Company - Asia-PacificDocument4 pagesMicrocontrollers - TOSHIBA Storage & Electronic Devices Solutions Company - Asia-PacificElton RibeiroNo ratings yet
- TMPM370 Group Product Introduction GuideDocument60 pagesTMPM370 Group Product Introduction GuideElton Ribeiro100% (1)
- Bai Tap Ve BJT3Document23 pagesBai Tap Ve BJT3nguyenphuonghuy1979No ratings yet
- TCPdumpBasics PDFDocument15 pagesTCPdumpBasics PDFElton RibeiroNo ratings yet
- Name PDFDocument18 pagesName PDFElton RibeiroNo ratings yet
- Tech Note 103Document13 pagesTech Note 103Elton RibeiroNo ratings yet
- An Introduction To Railway Signalling and EquipmentDocument33 pagesAn Introduction To Railway Signalling and EquipmentNitesh Jadhav100% (2)
- TCPdumpBasics PDFDocument15 pagesTCPdumpBasics PDFElton RibeiroNo ratings yet
- Notes On DC Track CircuitDocument50 pagesNotes On DC Track CircuitElton RibeiroNo ratings yet
- Notes On Solid State InterlockingDocument58 pagesNotes On Solid State InterlockingElton RibeiroNo ratings yet
- Cengag Readers CatalogueDocument79 pagesCengag Readers CatalogueElton RibeiroNo ratings yet
- SM 9412Document30 pagesSM 9412Elton RibeiroNo ratings yet
- Module 37 Nur 145Document38 pagesModule 37 Nur 145Marga WreatheNo ratings yet
- Beckman DxI 800 Prolactin Assay Superiority for Monomeric ProlactinDocument5 pagesBeckman DxI 800 Prolactin Assay Superiority for Monomeric Prolactindoxy20No ratings yet
- HS-2172 Vs HS-5500 Test ComparisonDocument1 pageHS-2172 Vs HS-5500 Test ComparisonRicardo VillarNo ratings yet
- Causes and Effects of PollutionDocument6 pagesCauses and Effects of PollutionNhư NgọcNo ratings yet
- Workload Assessment in Railway ControlDocument8 pagesWorkload Assessment in Railway ControlbbeeNo ratings yet
- Template EbcrDocument7 pagesTemplate EbcrNoraNo ratings yet
- Lectura Isaac NewtonDocument2 pagesLectura Isaac NewtonCESAR MAURICIO RODRIGUEZNo ratings yet
- Products and Services For Consumers: True / False QuestionsDocument65 pagesProducts and Services For Consumers: True / False QuestionsThúy HiềnNo ratings yet
- Jual Sokkia SET 350X Total Station - Harga, Spesifikasi Dan ReviewDocument5 pagesJual Sokkia SET 350X Total Station - Harga, Spesifikasi Dan Reviewbramsalwa2676No ratings yet
- Absence Makes The Heart Grow FonderDocument27 pagesAbsence Makes The Heart Grow FondereljhunNo ratings yet
- Retired Car Jacker Screen PlayDocument4 pagesRetired Car Jacker Screen Playapi-633948182No ratings yet
- D6528-07 ASTM Standard Consolidated Undrained Direct Simple Shear Testing of Cohesive SoilsDocument9 pagesD6528-07 ASTM Standard Consolidated Undrained Direct Simple Shear Testing of Cohesive SoilsDayana HernandezNo ratings yet
- Pemanfaatan Limbah Spanduk Plastik (Flexy Banner) Menjadi Produk Dekorasi RuanganDocument6 pagesPemanfaatan Limbah Spanduk Plastik (Flexy Banner) Menjadi Produk Dekorasi RuanganErvan Maulana IlyasNo ratings yet
- Ethics Module 2 - NotesDocument1 pageEthics Module 2 - Notesanon_137579236No ratings yet
- 2290 PDFDocument222 pages2290 PDFmittupatel190785No ratings yet
- Specs Mantilla UV BT8800 Oct 2014Document2 pagesSpecs Mantilla UV BT8800 Oct 2014Julio MendezNo ratings yet
- Chapter 4 Cost MinimizationDocument6 pagesChapter 4 Cost MinimizationXavier Hetsel Ortega BarraganNo ratings yet
- Blood Group 3Document29 pagesBlood Group 3Hamirie JoshuaNo ratings yet
- Very Low Altitude Drag-Free Satellites: R D UpdatesDocument5 pagesVery Low Altitude Drag-Free Satellites: R D Updatesraa2010No ratings yet
- 2.gantry Rotation Safety CheckDocument2 pages2.gantry Rotation Safety CheckLê Hồ Nguyên ĐăngNo ratings yet
- How Does Marijuana Affect The BrainDocument3 pagesHow Does Marijuana Affect The BrainWanNurAtikahNo ratings yet
- Daftar Harga Airway PT. Surgika 2017Document16 pagesDaftar Harga Airway PT. Surgika 2017Syaofi SofiNo ratings yet