You might also like
- Ejercicios de Soplo para La Intervención en RotacismoDocument26 pagesEjercicios de Soplo para La Intervención en RotacismoAlmudena VergaraNo ratings yet
- Resumen Metodología de La Investigación (Hernandez Sampieri)Document26 pagesResumen Metodología de La Investigación (Hernandez Sampieri)martinez_vii100% (5)
- Clasificacion de Las Armas de FuegoDocument22 pagesClasificacion de Las Armas de FuegoAlejandro Escobar YescasNo ratings yet
- Propagación móvil canalesDocument33 pagesPropagación móvil canalesJulie Viloria PortoNo ratings yet
- CAPÍTULO IV Materiales AglomerantesDocument45 pagesCAPÍTULO IV Materiales AglomerantesJoseph100% (1)
- Banco de Preguntas - AdobeDocument3 pagesBanco de Preguntas - AdobePato Daniel100% (1)
- Proyecto AplicadoDocument6 pagesProyecto AplicadojohanaNo ratings yet
- Procesamiento de Señles Anaógicas y Digitales - Ashok Ambardar - 2da Edici PDFDocument1,565 pagesProcesamiento de Señles Anaógicas y Digitales - Ashok Ambardar - 2da Edici PDFJulie Viloria PortoNo ratings yet
- Transmisor para Tele.Document8 pagesTransmisor para Tele.Julie Viloria PortoNo ratings yet
- Carta A Un Estudiante de DerechoDocument10 pagesCarta A Un Estudiante de Derechoziegler1000No ratings yet
- Presion de Vapor REIDDocument3 pagesPresion de Vapor REIDCharlesNo ratings yet
- Manifiesto Bibliotecarios Por La Ciencia AbiertaDocument4 pagesManifiesto Bibliotecarios Por La Ciencia AbiertaMiriam Hurt CorNo ratings yet
- Redaccion General ExposicionDocument6 pagesRedaccion General ExposicionJose Amadeus Venegas MNo ratings yet
- Flip FlopDocument9 pagesFlip FloppaulinodosantosNo ratings yet
- Windows 98 - InformeDocument5 pagesWindows 98 - InformesouljuanNo ratings yet
- EscaleraDocument10 pagesEscaleraLizeth Marioli Reyes HuamanNo ratings yet
- La Ascensión en Globo de Augusto Arcimis en 1905Document9 pagesLa Ascensión en Globo de Augusto Arcimis en 1905xsune2950No ratings yet
- Tarea #8 FACTOR DE POTENCIA DE UN TRANSFORMADORDocument11 pagesTarea #8 FACTOR DE POTENCIA DE UN TRANSFORMADORRAYMUNDO JIMENEZ HERRERA100% (1)
- Memoria de DemolicionDocument9 pagesMemoria de DemolicionGaby Mendoza MendozaNo ratings yet
- EEFCDocument4 pagesEEFCRommel Silva HurtadoNo ratings yet
- 318 SupuestoDocument24 pages318 SupuestoPaco GilNo ratings yet
- Periódico Calentamiento GlobalDocument4 pagesPeriódico Calentamiento GlobalMaría Fernanda García MNo ratings yet
- Proyecto 2. Caladero-Mercadona - Inter 2Document15 pagesProyecto 2. Caladero-Mercadona - Inter 2krisgarcia10No ratings yet
- Guía de Registro de LlamadasDocument18 pagesGuía de Registro de LlamadasFanco Gonzales EspinozaNo ratings yet
- Aspel COI 7.0 Buzon-ContableDocument4 pagesAspel COI 7.0 Buzon-ContableruizcjmNo ratings yet
- Ensayo de El Correo ElectronicoDocument5 pagesEnsayo de El Correo ElectronicoAngeli DiazNo ratings yet
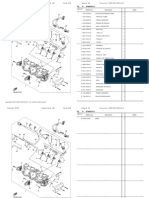
- Yzf-R6 Admision 2Document2 pagesYzf-R6 Admision 2JOSEP MARIA VILELLA RAMONEDANo ratings yet
- Corte Con OxiacetilenoDocument6 pagesCorte Con OxiacetilenoAngel Gonzales0% (1)
- Informe de Metrados Ejecutados y Porcentaje de AvanceDocument9 pagesInforme de Metrados Ejecutados y Porcentaje de AvanceAlex MVNo ratings yet
- Herramientas Todos Videos Noticias Shopping Más: ImágenesDocument1 pageHerramientas Todos Videos Noticias Shopping Más: ImágenesLucy HuertaNo ratings yet
- Evolución de La Firma ElectrónicaDocument27 pagesEvolución de La Firma ElectrónicaDavid0% (1)
- Tarea Calculo Declinacion Magnetica Rev0Document8 pagesTarea Calculo Declinacion Magnetica Rev0AlexanderMarten'sNo ratings yet
- Greencut GS620X 1000059Document100 pagesGreencut GS620X 1000059Michel Sayah CorreaNo ratings yet
- BASEDocument1 pageBASELit SaennerNo ratings yet