You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Optimizing Coal Boiler Combustion with Secondary Air DampersDocument4 pagesOptimizing Coal Boiler Combustion with Secondary Air Dampersari wiliamNo ratings yet
- John D. Rockefeller: Standard OilDocument2 pagesJohn D. Rockefeller: Standard Oilari wiliamNo ratings yet
- Riemann Notes PDFDocument11 pagesRiemann Notes PDFari wiliamNo ratings yet
- Safety Gram 27Document8 pagesSafety Gram 27bigpow6560No ratings yet
- Nugent 13Document2 pagesNugent 13ari wiliamNo ratings yet
- E 426 04Document35 pagesE 426 04shahganNo ratings yet
- (電動機械L2c補充教材) UMD - Prof. Ted Jacobson - maxwell PDFDocument4 pages(電動機械L2c補充教材) UMD - Prof. Ted Jacobson - maxwell PDFDavis Spat TambongNo ratings yet
- Rotational Molding ResinsDocument3 pagesRotational Molding Resinsviorelu99No ratings yet
- CH 8Document47 pagesCH 8Antoine Dumont NeiraNo ratings yet
- Wave Equation DerivationDocument2 pagesWave Equation DerivationSofyan DarmawanNo ratings yet
- Math ObjectsDocument22 pagesMath Objectsrupaj_n954No ratings yet
- Nanotech BookDocument129 pagesNanotech Bookari wiliamNo ratings yet
- ElectrolysisDocument33 pagesElectrolysisHunsbergerNo ratings yet
- Cart Activity Guide Energetic ElectrolysisDocument6 pagesCart Activity Guide Energetic Electrolysisari wiliamNo ratings yet
- 5 Cpe-2014-0034Document15 pages5 Cpe-2014-0034ari wiliamNo ratings yet
- Carbon Dioxide Laser Surgery For Skin LesionsDocument3 pagesCarbon Dioxide Laser Surgery For Skin Lesionsari wiliamNo ratings yet
- Whole House Boiler Sizing Method PDFDocument4 pagesWhole House Boiler Sizing Method PDFari wiliamNo ratings yet
- Electrolysis: Experiment 5Document9 pagesElectrolysis: Experiment 5ari wiliamNo ratings yet
- Engineering Design Guideline - Boilers Rev 1.1 WebDocument20 pagesEngineering Design Guideline - Boilers Rev 1.1 Webcaod1712No ratings yet
- DOD Program ChartsDocument226 pagesDOD Program Chartsari wiliamNo ratings yet
- Ijireeice 19Document9 pagesIjireeice 19ari wiliamNo ratings yet
- Observations of H Emission Profiles in Aditya TokamakDocument4 pagesObservations of H Emission Profiles in Aditya Tokamakari wiliamNo ratings yet
- Irrationality of Values of The Riemann Zeta FunctionDocument54 pagesIrrationality of Values of The Riemann Zeta Functionari wiliamNo ratings yet
- TC1P22Document1 pageTC1P22ari wiliamNo ratings yet
- An Overview of Protection SystemDocument162 pagesAn Overview of Protection SystemEdward DineshNo ratings yet
- Rzeta 11Document8 pagesRzeta 11KnspeisNo ratings yet
- History of Hydraulic Engineering-1 Pohl PDFDocument22 pagesHistory of Hydraulic Engineering-1 Pohl PDFJenni Milena GonzalezNo ratings yet
- Full TextDocument27 pagesFull Textari wiliamNo ratings yet
- A Friendly Introduction To The Riemann Hypothesis PDFDocument23 pagesA Friendly Introduction To The Riemann Hypothesis PDFSaptarshi GhoshNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- SG250HX_User+Manual_V15_20201106Document78 pagesSG250HX_User+Manual_V15_20201106specopbookieNo ratings yet
- High Efficiency ZXDU58 B121 DC Power SystemDocument2 pagesHigh Efficiency ZXDU58 B121 DC Power SystemMarcos Cochachi PomaNo ratings yet
- EPEVER Datasheet TRIRONDocument3 pagesEPEVER Datasheet TRIRONIdham HawariNo ratings yet
- Fallas mlb3Document30 pagesFallas mlb3Kelvis MateranoNo ratings yet
- IIT-Madras, Momentum Transfer: July 2005-Dec 2005Document23 pagesIIT-Madras, Momentum Transfer: July 2005-Dec 2005Rehan UmerNo ratings yet
- RAC Lab AssignmentDocument6 pagesRAC Lab AssignmentAhmed AliNo ratings yet
- Serial Korea Battery Charger Webinar ComentDocument45 pagesSerial Korea Battery Charger Webinar ComentFredy R. MalagonNo ratings yet
- Rahnamaye Nasbe 110EM - en PDFDocument17 pagesRahnamaye Nasbe 110EM - en PDFsenooooooNo ratings yet
- Steam TurbineDocument12 pagesSteam TurbineMandeep Singh PannuNo ratings yet
- Phasor DiagramsDocument3 pagesPhasor Diagramspurushg62No ratings yet
- Item Checklist No. DescriptionDocument7 pagesItem Checklist No. DescriptionAdrianNo ratings yet
- WECC ModelsDocument10 pagesWECC ModelsAlexNo ratings yet
- GRAPHICAL ANALYSIS OF VOLTAGE CONTROLLERSDocument7 pagesGRAPHICAL ANALYSIS OF VOLTAGE CONTROLLERSkavish malakaNo ratings yet
- 132/33kv SubstationDocument44 pages132/33kv SubstationAkhileshPP85% (20)
- Tesla's 1901 patent for wireless energy transmissionDocument4 pagesTesla's 1901 patent for wireless energy transmissionassNo ratings yet
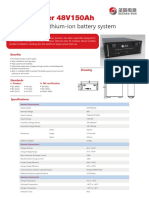
- Datasheet Batería Li Ion LFP 48V150AhDocument2 pagesDatasheet Batería Li Ion LFP 48V150AhSandra Paola Pulido PeñuelaNo ratings yet
- Sankey DiagramDocument2 pagesSankey DiagramjohnNo ratings yet
- Electrical Design Analysis: 3 Storey Commercial BuildingDocument6 pagesElectrical Design Analysis: 3 Storey Commercial Buildingcjay ganir0% (1)
- Monitoring RelaysDocument8 pagesMonitoring Relayskhalithmansoor1950No ratings yet
- Efacec Switchgear SolutionsDocument32 pagesEfacec Switchgear SolutionsanonymphantomNo ratings yet
- Make in India PresentationDocument24 pagesMake in India PresentationPsrawat RawatNo ratings yet
- Auto Start Gu320b Cummins Mana 18 PlanoDocument42 pagesAuto Start Gu320b Cummins Mana 18 PlanoGONZALONo ratings yet
- Al Boury Oil FieldDocument11 pagesAl Boury Oil FieldSherif MohammedNo ratings yet
- AN0144 Line Reactors and Isolation TransformersDocument4 pagesAN0144 Line Reactors and Isolation TransformerstvnexusNo ratings yet
- OnfinitiDocument6 pagesOnfinitiAPC UPSNo ratings yet
- Kaori HeatexchangerDocument28 pagesKaori HeatexchangerPatiwat AtayagulNo ratings yet
- Renewable Energy ResearchDocument10 pagesRenewable Energy Researchapi-242059245No ratings yet
- Architectural ProgrammingDocument40 pagesArchitectural ProgrammingJohn Carlo QuiniaNo ratings yet
- PMT Outgoing Fax 512 ALIDocument3 pagesPMT Outgoing Fax 512 ALIcakhokheNo ratings yet
- ETR Junction Box-Switchgear Not Required (OP, WT, OS)Document25 pagesETR Junction Box-Switchgear Not Required (OP, WT, OS)Richard ChuaNo ratings yet